路网生成方法、可读存储介质及智能设备与流程
本申请涉及数据分析处理,具体提供一种路网生成方法、可读存储介质及智能设备。
背景技术:
1、路网数据包含拓扑信息和道路几何信息。路网数据是自动驾驶汽车进行导航、决策、规划的基础。一般城区或者高速等场景下的路网生成往往是依赖于对车道线的识别。
2、但是,地下停车场、小区、服务区等复杂低速场景下,路网结构复杂,且车道线非标准化,存在车道线磨损严重的情况,甚至存在有些场景无车道线的情况。因此无法实现通过车道线识别的方法来进行路网数据的生成。
3、相应地,本领域需要一种新的路网生成方案来解决上述问题。
技术实现思路
1、为了克服上述缺陷,提出了本申请,以提供解决或至少部分地解决如何实现复杂低速场景下的路网数据的生成的问题。
2、在第一方面,本申请提供一种路网生成方法,所述方法包括:
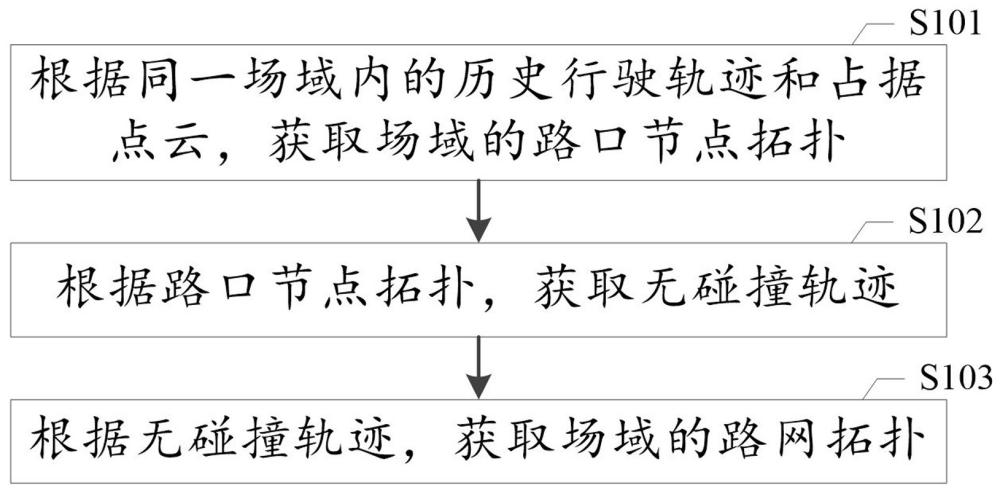
3、根据同一场域内的历史行驶轨迹和占据点云,获取所述场域的路口节点拓扑;
4、根据所述路口节点拓扑,获取无碰撞轨迹;
5、根据所述无碰撞轨迹,获取所述场域的路网拓扑
6、在上述路网生成方法的一个技术方案中,所述根据同一场域内的历史行驶轨迹和占据点云,获取所述场域的路口节点拓扑,包括:
7、根据所述历史行驶轨迹和所述占据点云,获取所述场域的路口识别结果;
8、根据所述路口识别结果,获取所述路口节点拓扑。
9、在上述路网生成方法的一个技术方案中,所述根据所述历史行驶轨迹和所述占据点云,获取所述场域的路口识别结果,包括:
10、基于深度学习识别方法,根据所述历史行驶轨迹和所述占据点云,获取所述路口识别结果。
11、在上述路网生成方法的一个技术方案中,所述根据所述路口识别结果,获取所述路口节点拓扑,包括:
12、根据所述路口识别结果、所述历史行驶轨迹数据和所述占据点云,获取每个所述路口识别结果对应的路口节点数据;
13、根据所述路口节点数据和所述历史行驶轨迹的时序信息,获取所述路口节点拓扑。
14、在上述路网生成方法的一个技术方案中,所述根据所述路口识别结果、所述历史行驶轨迹数据和所述占据点云,获取每个所述路口识别结果对应的路口节点数据,包括:
15、针对每个路口识别结果,基于深度学习方法,根据所述历史行驶轨迹数据和所述占据点云,获取所述路口识别结果的节点位置和节点角度;
16、将所述节点位置和所述节点角度,作为所述路口节点数据。
17、在上述路网生成方法的一个技术方案中,所述根据所述路口节点数据和所述历史行驶轨迹的时序信息,获取所述路口节点拓扑,包括:
18、根据所述历史行驶轨迹的时序信息,获取关联的路口节点数据之间的前续后继关系,以实现所述路口节点数据之间的连通,从而获得所述路口节点拓扑。
19、在上述路网生成方法的一个技术方案中,所述根据所述路口节点拓扑,获取无碰撞轨迹,包括:
20、基于所述场域的栅格地图,获取所述场域的静态障碍物占据情况;
21、根据所述静态障碍物占据情况和所述路口节点拓扑,获取所述无碰撞轨迹。
22、在上述路网生成方法的一个技术方案中,所述根据所述静态障碍物占据情况和所述路口节点拓扑,获取所述无碰撞轨迹,包括:
23、根据所述路口节点拓扑分别获取驶入路口对应的开始节点的节点位置和节点角度,以及驶出路口对应的结束节点的节点位置和节点角度;
24、根据所述静态障碍物占据情况、所述开始节点的节点位置和节点角度、所述结束节点的节点位置和节点角度,应用路径规划算法,以代价最小化为规划目标,进行无碰撞轨迹规划,获取所述无碰撞轨迹;
25、其中,所述代价包括所述无碰撞轨迹规划的当前节点的节点位置到所述结束节点的节点位置之间的距离、所述当前节点的节点角度与所述无碰撞轨迹规划的下一个节点的节点角度之间的夹角的至少一种。
26、在上述路网生成方法的一个技术方案中,所述根据所述无碰撞轨迹,获取所述场域的路网拓扑,包括:
27、根据车体动力学模型,对所述无碰撞轨迹进行调整,获得调整后的无碰撞轨迹;
28、根据所述调整后的无碰撞轨迹,获得所述路网拓扑。
29、在第二方面,提供一种计算机可读存储介质,该计算机可读存储介质其中存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行上述路网生成方法的技术方案中任一项技术方案所述的路网生成方法。
30、在第三方面, 一种智能设备,包括:
31、至少一个处理器;
32、以及,与所述至少一个处理器通信连接的存储器;
33、其中,所述存储器中存储有计算机程序,所述计算机程序被所述至少一个处理器执行时实现上述路网生成方法的技术方案中任一项技术方案所述的路网生成方法。
34、本申请上述一个或多个技术方案,至少具有如下一种或多种有益效果:
35、在实施本申请的技术方案中,本申请根据同一场域的历史行驶轨迹和占据点云,获得场域的路口节点拓扑,根据路口节点拓扑获取无碰撞轨迹,根据无碰撞轨迹获取场域的路网拓扑。通过上述配置方式,本申请以场域内的历史行驶轨迹和占据点云作为输入,获得路网拓扑,不再依赖于车载传感器对车道线等目标的感知信息,在车道线磨损以及没有车道线的场景下,以及各种复杂低速场景下都能够自动生成路网拓扑。且本申请不完全依赖于历史行驶轨迹,而是融合了占据点云提供的环境信息,能够使得获得路网拓扑更为接近现实。同时本申请的路网拓扑是基于无碰撞轨迹生成的,从而能够保证生成的路网拓扑能够有效确保避障。
技术特征:
1.一种路网生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的路网生成方法,其特征在于,
3.根据权利要求2所述的路网生成方法,其特征在于,
4.根据权利要求2所述的路网生成方法,其特征在于,
5.根据权利要求4所述的路网生成方法,其特征在于,
6.根据权利要求4所述的路网生成方法,其特征在于,
7.根据权利要求1所述的路网生成方法,其特征在于,
8.根据权利要求7所述的路网生成方法,其特征在于,
9.根据权利要求1所述的路网生成方法,其特征在于,
10.一种计算机可读存储介质,其中存储有多条程序代码,其特征在于,所述程序代码适于由处理器加载并运行以执行权利要求1至9中任一项所述的路网生成方法。
11.一种智能设备,其特征在于,包括:
技术总结
本申请涉及数据分析处理技术领域,具体提供一种路网生成方法、可读存储介质及智能设备,旨在解决如何实现复杂低速场景下的路网数据的生成的问题。为此目的,本申请根据同一场域的历史行驶轨迹和占据点云,获得场域的路口节点拓扑,根据路口节点拓扑获取无碰撞轨迹,根据无碰撞轨迹获取场域的路网拓扑。本申请以场域内的历史行驶轨迹和占据点云作为输入获得路网拓扑,不再依赖于车载传感器对车道线等目标的感知信息,在车道线磨损以及没有车道线的场景下,以及各种复杂低速场景下都能够自动生成路网拓扑。且融合了占据点云提供的环境信息,使得获得路网拓扑更为接近现实。同时能够保证生成的路网拓扑能够有效确保避障。
技术研发人员:肖中阳,孙立,袁弘渊,任少卿
受保护的技术使用者:安徽蔚来智驾科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!