道路护栏识别方法、装置及存储介质与流程
本发明涉及车载雷达,尤其涉及一种道路护栏识别方法、装置及存储介质。
背景技术:
1、近年来随着自动驾驶技术和高级辅助行业的快速兴起,一些能够实现智能驾驶功能的产品得到了广泛地应用,例如应用于车辆的盲区监测系统(blind spot detection,bsd)。目前行业中的bsd功能主要通过汽车传感器毫米波雷达实现,根据车载毫米波雷达发射和接收回波信号来实现测距、测速和测角,所得量测数据经过处理后可用于bsd的目标动静态识别。
2、在车辆行驶中,经常出现道路中有护栏情况,需要通过雷达识别出护栏。现有技术常通过跟踪点建立护栏模型来降低护栏周围目标动静态识别出错的概率。通过跟踪点识别护栏时,识别准确率容易受数据处理中选用的运动模型的影响,常用的模型为恒定速度模型(cv)和恒定加速度模型(ca),该类模型通常适用于车辆直线行驶的应用场景,对曲线行驶的适应性较差;另外对于反射点较少的护栏场景难以形成丰富的跟踪点,不利于护栏模型的建立。比如在实际应用场景中,可能存在驾驶员快速走s弯的情况,或护栏为水泥导致目标跟踪点相对稀疏的情况。该场景下用跟踪点建立护栏模型容易出现难以辨别护栏或高误判率的问题,导致护栏识别策略失效或目标动静态判断出错。
3、当从护栏上反射回来的检测点被错误识别为动目标后,车端bsd系统会持续进行报警,报警时间十几秒到几十秒不等,直到护栏模型重新生效并对护栏周围检测点动静态做正确判断后才结束报警,不仅降低了驾驶员的用车体验,还存在潜在的安全隐患。
技术实现思路
1、本发明提供了一种道路护栏识别方法、装置及存储介质,旨在有效解决现有技术中通过车辆雷达进行护栏识别时容易出现误判的技术问题。
2、根据本发明的一方面,本发明提供一种道路护栏识别方法,所述方法包括:
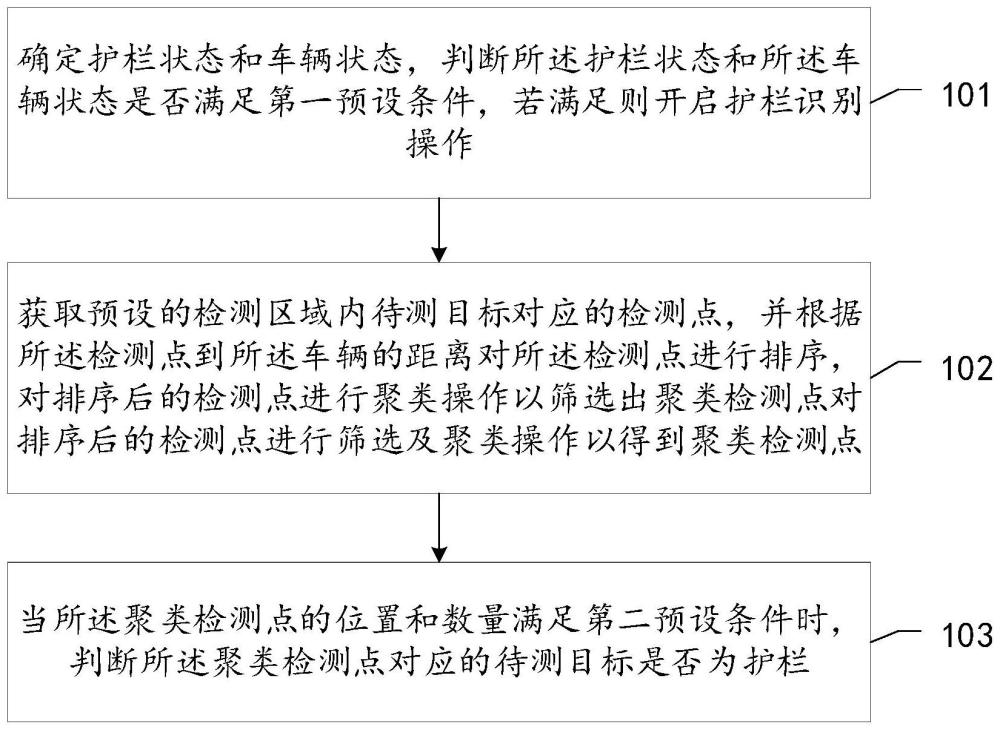
3、确定护栏状态和车辆状态,判断所述护栏状态和所述车辆状态是否满足第一预设条件,若满足,则开启护栏识别操作;
4、获取预设的检测区域内待测目标对应的检测点,并根据所述检测点到所述车辆的距离对所述检测点进行排序,对排序后的检测点进行筛选及聚类操作以得到聚类检测点;
5、当所述聚类检测点的位置和数量满足第二预设条件时,判断所述聚类检测点对应的待测目标是否为护栏。
6、进一步地,所述确定护栏状态和车辆状态包括:
7、搭建护栏雷达模型并设置护栏跟踪点,根据所述护栏跟踪点确定是否存在护栏;若存在护栏,则将表征护栏状态的护栏标志位设置为第一预设值;若不存在护栏,则将表征护栏状态的护栏标志位设置为第二预设值;
8、计算车辆的车辆速度和偏航角。
9、进一步地,所述判断所述护栏状态和所述车辆状态是否满足第一预设条件包括:
10、当所述护栏标志位为所述第一预设值、和所述车辆速度大于预设的速度阈值、和所述偏航角小于预设的角度阈值时,将状态激活参数的数值增加1,并将状态释放参数的数值复位为0;
11、当所述护栏标志位为所述第二预设值、或所述车辆速度不大于所述速度阈值、或所述偏航角不小于所述角度阈值时,将所述状态激活参数的数值复位为0,并将所述状态释放参数的数值增加1;
12、当所述状态激活参数的数值达到预设的激活阈值时,确定所述护栏状态和所述车辆状态满足所述第一预设条件;
13、所述方法还包括:
14、当所述状态释放参数的数值达到预设的释放阈值时,则退出护栏识别操作。
15、进一步地,所述获取预设的检测区域内待测目标对应的检测点包括:
16、根据雷达的脉冲信号和回波信号确定一个或多个待测目标;
17、若待测目标在所述检测区域内,则获取该待测目标对应的检测点。
18、进一步地,所述根据所述检测点到所述车辆的距离对所述检测点进行排序包括:
19、将所述检测点的坐标由雷达极坐标系转换为笛卡尔坐标系;
20、根据所述检测点在所述笛卡尔坐标系中的坐标,计算所述检测点在第一方向上到所述车辆的横向距离,其中,所述第一方向垂直于所述车辆的行驶方向且平行于水平面;
21、计算所述检测点在第二方向上到所述车辆的纵向距离,其中,所述第二方向垂直与所述第一方向且平行于水平面;
22、通过希尔排序方法对所述纵向距离进行排序,以使所述检测点根据纵向距离升序排列或降序排列。
23、进一步地,所述对排序后的检测点进行筛选及聚类操作以得到聚类检测点包括:
24、计算所述横向距离的平均值,当检测点的横向距离和所述平均值的差值大于预设的差值时删除对应的检测点;
25、根据所述检测点对应的簇编号对所述检测点进行分类;
26、针对每一簇,在该簇检测点中选取一个检测点为关联点,将该关联点与该簇中其它的检测点进行关联以得到多个关联点;
27、针对每个关联点,将该关联点与该簇中其它的检测点进行关联,将关联成功的检测点确定为所述聚类检测点。
28、进一步地,根据如下操作判断所述聚类检测点的位置和数量满足第二预设条件:
29、根据一个簇中聚类检测点在笛卡尔坐标系中坐标,计算所述聚类检测点在所述第一方向上的最小横坐标和最大横坐标,计算所述最小横坐标和所述最大横坐标之间的横坐标差值,确定所述横坐标差值小于预设的横坐标阈值;
30、计算所述聚类检测点在第二方向上的最小纵坐标和最大纵坐标,计算所述最小纵坐标和所述最大纵坐标之间的纵坐标差值,确定所述纵坐标差值小于预设的纵坐标阈值,其中,所述第二方向垂直与所述第一方向且平行于水平面;
31、获取一个簇中聚类检测点的总数量,确定所述总数量大于预设的数量阈值。
32、进一步地,所述方法还包括:
33、当所述聚类检测点的位置或数量不满足所述第二预设条件时,确定上一帧的聚类检测点的位置和数量是否满足所述第二预设条件,若满足,则用上一帧的聚类检测点替换当下帧的聚类检测点。
34、进一步地,所述判断所述聚类检测点对应的待测目标是否为护栏包括:
35、根据多帧雷达信号判断所述聚类检测点对应的待测目标的动静状态;
36、若所述待测目标的动静状态为静态,则确定所述待测目标为护栏。
37、根据本发明的另一方面,本发明还提供了一种道路护栏识别装置,所述装置包括:
38、状态确定模块,用于确定护栏状态和车辆状态,判断所述护栏状态和所述车辆状态是否满足第一预设条件,若满足,则开启护栏识别操作;
39、检测点筛选模块,用于获取预设的检测区域内待测目标对应的检测点,并根据所述检测点到所述车辆的距离对所述检测点进行排序,对排序后的检测点进行筛选及聚类操作以得到聚类检测点;
40、护栏判断模块,用于当所述聚类检测点的位置和数量满足第二预设条件时,判断所述聚类检测点对应的待测目标是否为护栏。
41、根据本发明的另一方面,本发明还提供了一种存储介质,所述存储介质中存储有多条指令,所述指令适于由处理器加载以执行如上所述的任一道路护栏识别方法。
42、通过本发明中的上述实施例中的一个实施例或多个实施例,至少可以实现如下技术效果:
43、在本发明所公开的技术方案中,确定护栏状态和车辆状态,判断护栏状态和车辆状态是否满足第一预设条件,若满足则进行护栏识别操作;获取预设的检测区域内待测目标对应的检测点,并根据检测点到车辆的距离对检测点进行排序;对排序后的检测点进行聚类操作以筛选出聚类检测点;当聚类检测点的位置和数量满足第二预设条件时,判断聚类检测点对应的待测目标是否为护栏。本技术在使用跟踪点进行护栏检测的基础上,对预设检测区域内的检测点进行多次筛选并进行聚类得到聚类检测点,再判定是否为护栏。本方案适用于车辆驾驶员采取快速走s弯以及有水泥护栏的应用场景,能够显著提高护栏识别准确度,有效防止车端bsd系统误报警。
- 还没有人留言评论。精彩留言会获得点赞!