车型识别方法、装置、计算机设备和存储介质与流程
本技术涉及计算机,特别是涉及一种车型识别方法、装置、计算机设备和存储介质。
背景技术:
1、随着计算机技术的发展,出现了车辆识别技术,该技术可以应用于高速的出入口及收费稽核等方面。
2、传统技术中,通过多方位的图像采集设备对车辆图像进行采集,根据确定出的车辆图像进行拼接,从而得到拼接完成的完整的整车图像,并基于该整车图像解析得到车型信息。
3、该方式虽然能够得到车辆的车型信息,但存在车型信息获取不准确的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够准确获取车型信息的车型识别方法、装置、计算机设备和存储介质。
2、第一方面,本技术提供了一种车型识别方法,包括:
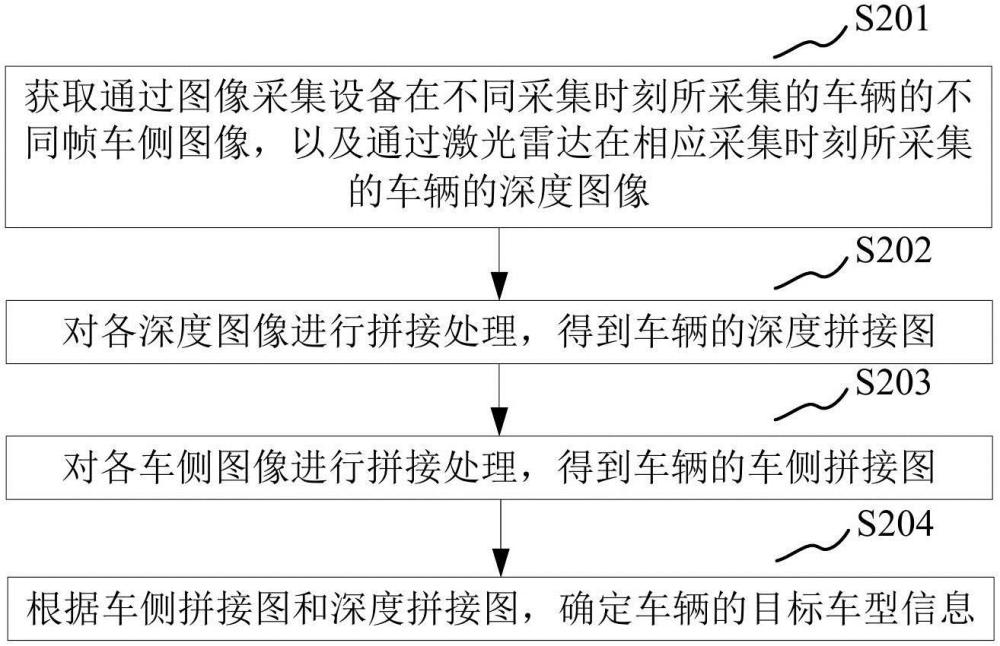
3、获取通过图像采集设备在不同采集时刻所采集的车辆的不同帧车侧图像,以及通过激光雷达在相应采集时刻所采集的车辆的深度图像;图像采集设备和激光雷达设置于道路同一侧的同一竖直线上;
4、对各深度图像进行拼接处理,得到车辆的深度拼接图;
5、对各车侧图像进行拼接处理,得到车辆的车侧拼接图;
6、根据车侧拼接图和深度拼接图,确定车辆的目标车型信息。
7、在其中一个实施例中,对各深度图像进行拼接处理,得到车辆的深度拼接图,包括:
8、根据当前帧车侧图像和上一帧车侧图像之间的差异情况,确定是否需要进行拼接处理;
9、若需要进行拼接处理,则根据当前帧深度图像中的深度信息,确定当前帧深度图像中的待拼接深度图像;
10、将不同帧对应的各待拼接深度图像顺序拼接,得到深度拼接图。
11、在其中一个实施例中,根据当前帧深度图像中的深度信息,确定当前帧深度图像中的待拼接深度图像,包括:
12、根据当前帧深度图像中的深度信息,确定当前帧深度图像对应的边界深度信息;
13、根据预设的宽度车侧信息、帧时间和预设比值,确定不同帧共用的宽度深度信息;
14、根据当前帧对应的边界深度信息和宽度深度信息,确定当前帧深度图像中的待拼接深度图像。
15、在其中一个实施例中,对各车侧图像进行拼接处理,得到车辆的车侧拼接图,包括:
16、根据当前帧深度图像中的待拼接深度图像对应的像素位置,以及预设的深度图像与车侧图像之间的位置映射关系,确定当前帧车侧图像中的待拼接车侧图像;
17、将不同帧对应的各待拼接车侧图像顺序拼接,得到车侧拼接图。
18、在其中一个实施例中,根据当前帧深度图像中的待拼接深度图像对应的像素位置,以及预设的深度图像与车侧图像之间的位置映射关系,确定当前帧车侧图像中的待拼接车侧图像,包括:
19、根据当前帧深度图像中的深度信息,确定当前帧深度图像对应的边界深度信息;
20、根据当前帧对应的边界深度信息以及位置映射关系,确定当前帧车侧图像对应的边界车侧信息;其中,边界车侧信息包括顶部车侧信息和底部车侧信息;
21、根据当前帧对应的边界车侧信息和预设的宽度车侧信息,对当前帧车侧图像进行分割处理,得到当前帧车侧图像中的待拼接车侧图像。
22、在其中一个实施例中,根据车侧拼接图和深度拼接图,确定车辆的目标车型信息,包括:
23、根据车侧拼接图,确定车辆的第一车型信息,以及根据深度拼接图,确定车辆的第二车型信息;
24、对第一车型信息和第二车型信息进行融合处理,得到车辆的目标车型信息。
25、在其中一个实施例中,根据车侧拼接图,确定车辆的第一车型信息,以及根据深度拼接图,确定车辆的第二车型信息,包括:
26、将车侧拼接图输入到训练好的车侧图识别模型中,得到车侧拼接图对应的第一车型信息;
27、将车侧拼接图输入到训练好的深度图识别模型中,得到深度拼接图对应的第二车型信息。
28、第二方面,本技术还提供了一种车型识别装置,包括:
29、图像获取模块,用于获取通过图像采集设备在不同采集时刻所采集的车辆的不同帧车侧图像,以及通过激光雷达在相应采集时刻所采集的车辆的深度图像;图像采集设备和激光雷达设置于道路同一侧的同一竖直线上;
30、深度确定模块,用于对各深度图像进行拼接处理,得到车辆的深度拼接图;
31、车侧确定模块,用于对各车侧图像进行拼接处理,得到车辆的车侧拼接图;
32、车型确定模块,用于根据车侧拼接图和深度拼接图,确定车辆的目标车型信息。
33、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
34、获取通过图像采集设备在不同采集时刻所采集的车辆的不同帧车侧图像,以及通过激光雷达在相应采集时刻所采集的车辆的深度图像;图像采集设备和激光雷达设置于道路同一侧的同一竖直线上;
35、对各深度图像进行拼接处理,得到车辆的深度拼接图;
36、对各车侧图像进行拼接处理,得到车辆的车侧拼接图;
37、根据车侧拼接图和深度拼接图,确定车辆的目标车型信息。
38、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
39、获取通过图像采集设备在不同采集时刻所采集的车辆的不同帧车侧图像,以及通过激光雷达在相应采集时刻所采集的车辆的深度图像;图像采集设备和激光雷达设置于道路同一侧的同一竖直线上;
40、对各深度图像进行拼接处理,得到车辆的深度拼接图;
41、对各车侧图像进行拼接处理,得到车辆的车侧拼接图;
42、根据车侧拼接图和深度拼接图,确定车辆的目标车型信息。
43、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
44、获取通过图像采集设备在不同采集时刻所采集的车辆的不同帧车侧图像,以及通过激光雷达在相应采集时刻所采集的车辆的深度图像;图像采集设备和激光雷达设置于道路同一侧的同一竖直线上;
45、对各深度图像进行拼接处理,得到车辆的深度拼接图;
46、对各车侧图像进行拼接处理,得到车辆的车侧拼接图;
47、根据车侧拼接图和深度拼接图,确定车辆的目标车型信息。
48、上述车型识别方法、装置、计算机设备和存储介质,获取通过图像采集设备在不同采集时刻所采集的车辆的不同帧车侧图像,以及通过激光雷达在相应采集时刻所采集的车辆的深度图像;图像采集设备和激光雷达设置于道路同一侧的同一竖直线上;对各深度图像进行拼接处理,得到车辆的深度拼接图;对各车侧图像进行拼接处理,得到车辆的车侧拼接图;根据车侧拼接图和深度拼接图,确定车辆的目标车型信息。相比于传统技术中仅根据车侧图像识别车型信息的方式,本技术通过对识别到的多帧深度图像和多帧车侧图像分别进行拼接处理,得到更加准确且合理的深度拼接图和车侧拼接图,进一步根据该深度拼接图和车侧拼接图,确定得到更加准确的目标车型信息。
- 还没有人留言评论。精彩留言会获得点赞!