一种数字孪生园林景观设计方法与流程
本发明涉及园林景观设计的,尤其涉及一种数字孪生园林景观设计方法。
背景技术:
1、传统的园林景观设计需要手绘图纸、模型制作等烦琐的操作,需要设计师反复推敲和修改,然后再建模观看效果。对不满意的地方需要重新绘制,这一重复迭代的过程极大延长的园林景观设计的周期和难度,同时也耗费了设计师大量的时间和精力。针对该问题,本发明提出一种数字孪生园林景观设计方法,通过数字孪生技术根据预设的参数和模板快速生成不同的设计方案,并进行快速的修改和优化,大大缩短了设计周期,提高了设计效率,同时结合可视化技术将设计方案直观地呈现给用户,并通过用户的反馈来进行快速修改和优化,达到提高设计效率和用户满意度的目的。
技术实现思路
1、有鉴于此,本发明提供一种数字孪生园林景观设计方法,目的在于:1)通过拍摄园林深度图像,并提取表征园林景观边缘的像素点信息构成点云数据,基于点云数据所对应坐标的距离信息实现离群点云数据的过滤处理,并设置自适应阈值以及自适应迭代次数对园林基准面进行迭代,使得迭代后的园林基准面包含尽量多的梯度变化不明显的低频点云数据,实现园林基准面的构建;2)结合高频点云数据之间的距离比例计算得到距离信息熵,作为高频点云数据之间的距离信息,并结合距离信息计算得到高频点云数据的密度,实现密度聚类处理,构建得到若干个景观点云集合,分别对每个景观点云集合进行景观中心坐标位置计算以及景观轮廓包络信息提取,根据识别得到的园林基准面和景观信息进行园林数字化重建,其中数字化重建过程包括景观位置坐标重建以及景观颜色渲染处理,得到园林深度图像对应的数字孪生结果,并结合季节信息对不同景观进行颜色补偿,构建得到不同季节下的园林景观数字孪生结果。
2、实现上述目的,本发明提供的一种数字孪生园林景观设计方法,包括以下步骤:
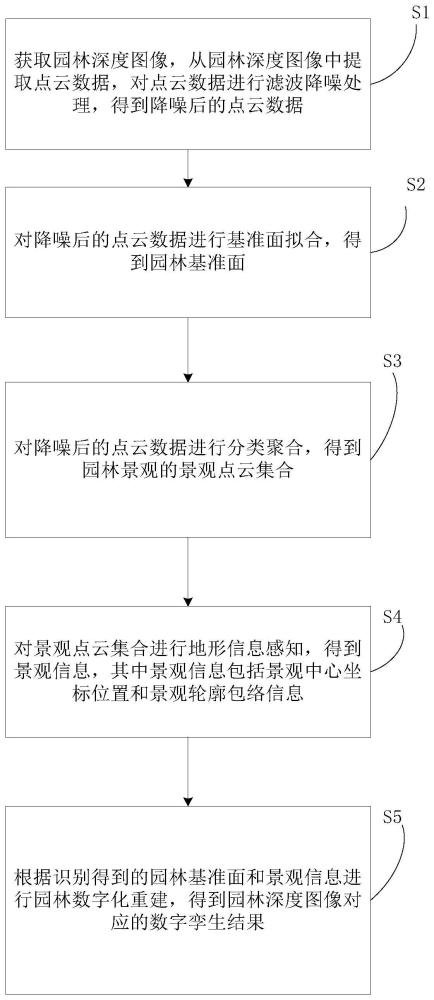
3、s1:获取园林深度图像,从园林深度图像中提取点云数据,对点云数据进行滤波降噪处理,得到降噪后的点云数据;
4、s2:对降噪后的点云数据进行基准面拟合,得到园林基准面,其中改进的随机采样一致性算法为所述基准面拟合的主要实施方法;
5、s3:对降噪后的点云数据进行分类聚合,得到园林景观的景观点云集合;
6、s4:对景观点云集合进行地形信息感知,得到景观信息,其中景观信息包括景观中心坐标位置和景观轮廓包络信息;
7、s5:根据识别得到的园林基准面和景观信息进行园林数字化重建,得到园林深度图像对应的数字孪生结果。
8、作为本发明的进一步改进方法:
9、可选地,所述s1步骤中获取园林深度图像,从园林深度图像中提取点云数据,包括:
10、利用深度相机对园林进行拍摄,得到园林深度图像i,从园林深度图像中提取点云数据,其中园林深度图像中每个像素的信息包含像素在不同颜色通道的颜色值以及表征像素所对应园林景观到相机距离的深度信息,点云数据的提取流程为:
11、对园林深度图像i中任意像素进行结合深度信息的差分表示处理,其中园林深度图像i中第x行第y列像素i(x,y)的差分表示处理结果为:
12、h(x,y)=h1(x,y,dx,y)-h2(x,y,dx,y)
13、
14、
15、其中:
16、h(x,y)表示像素i(x,y)的差分处理结果;
17、dx,y表示像素i(x,y)的深度信息;在本发明实施例中,像素的深度信息也被称为像素的深度值;
18、ik(x,y)表示像素i(x,y)在k颜色通道的颜色值;
19、e表示自然常数,σ1,σ2表示尺度标准差;在本发明实施例中,将σ1,σ2分别设置为2和4;
20、c1,c2分别表示单位像素在水平方向以及竖直方向的长度;
21、fx表示深度相机在水平方向的焦距,fy表示深度相机在竖直方向的焦距;
22、在以像素i(x,y)为中心的3×3像素区域中,像素i(x,y)的差分表示结果为最大值,则将像素i(x,y)的像素坐标(x,y)、深度信息dx,y以及像素在rgb颜色通道的颜色值构成园林深度图像i中的一组点云数据,所构成园林深度图像i的点云数据集合u为:
23、
24、其中:
25、un表示点云数据集合u中第u组点云数据,(xn,yn)表示点云数据un中的像素坐标,
26、表示点云数据un中的深度信息;
27、ir(xn,yn),ig(xn,yn),ib(xn,yn)分别表示点云数据un中rgb颜色通道的颜色值;
28、对点云数据进行滤波降噪处理,得到降噪后的点云数据。
29、可选地,所述s1步骤中对点云数据进行滤波降噪处理,得到降噪后的点云数据,包括:
30、对点云数据进行滤波降噪处理,得到降噪后的点云数据,其中点云数据的滤波降噪处理流程为:
31、s11:结合深度信息对点云数据中的像素坐标进行转换,得到点云数据三维坐标,其中第n组点云数据的点云数据坐标转换公式为:
32、
33、其中:
34、(xn,yn,zn)表示第n组点云数据的点云数据三维坐标;
35、s12:计算得到每组点云数据所对应像素的灰度值、灰度梯度值以及灰度梯度方向,将灰度梯度值小于预设梯度阈值的点云数据标记为低频点云数据,将其他点云数据标记为高频点云数据,分别构成低频点云数据集合以及高频点云数据集合;在本发明实施例中,像素的灰度梯度值计算流程为对园林深度图像i进行灰度化处理,并计算得到灰度化处理后园林深度图像i的像素梯度值;
36、s13:从任意点云数据集合中选取点云数据三维坐标,计算得到所选取点云数据三维坐标到集合中其他点云数据三维坐标的欧式距离,并选取s个最小的欧式距离构成所选取点云数据三维坐标的欧式距离集合,分别计算得到欧式距离集合中的均值以及标准差,其中点云数据三维坐标(xn,yn,zn)所对应欧式距离集合中的均值meann以及标准差stdn分别为meann,stdn;
37、s14:计算得到所选取点云数据三维坐标到其他点云数据三维坐标的欧式距离均值,若欧式距离均值大于预设的距离阈值,则将点云数据三维坐标所对应的点云数据标记为离群点云进行过滤,其中点云数据三维坐标(xn,yn,zn)所对应的距离阈值为:
38、disn=meann+τstdn
39、其中:
40、disn表示点云数据三维坐标(xn,yn,zn)所对应的距离阈值,τ表示控制参数;
41、s15:重复步骤s13-s14,得到降噪后的低频点云数据集合以及高频点云数据集合:
42、
43、
44、其中:
45、u1表示降噪后的低频点云数据集合,表示低频点云数据集合u1中的第i个点云数据,表示点云数据中的点云数据三维坐标,表示点云数据所对应像素的灰度值,分别表示点云数据所对应像素的灰度梯度值以及灰度梯度方向,num1表示低频点云数据集合中的低频点云数据数目;
46、u2表示降噪后的高频点云数据集合,表示高频点云数据集合u2中的第j个点云数据,表示点云数据中的点云数据三维坐标,表示点云数据所对应像素的灰度值,分别表示点云数据所对应像素的灰度梯度值以及灰度梯度方向,num2表示高频点云数据集合中的高频点云数据数目;
47、将降噪后的低频点云数据集合以及高频点云数据集合作为降噪后的点云数据。
48、可选地,所述s2步骤中对降噪后的点云数据进行基准面拟合,包括:
49、对降噪后的点云数据进行基准面拟合,得到园林基准面,其中基准面拟合流程为:
50、s21:从降噪后的点云数据中提取降噪后的低频点云数据集合;
51、s22:初始化园林基准面p0(a0x+b0y+c0z+d0=0),其中a0,b0,c0,d0均为平面参数初始系数,x,y,z表示点云数据三维坐标的自变量;
52、s23:设置园林基准面的当前迭代次数为t,最大迭代次数为max,则园林基准面的第t次迭代结果为pt(atx+bty+ctz+dt=0),其中at,bt,ct,dt均为平面参数的第t次迭代系数,t的初始值为0;在本发明实施例中,atx+bty+ctz+dt=0表示园林基准面的平面方程;
53、s24:计算得到低频点云数据集合中任意低频点云数据所对应点云数据三维坐标到园林基准面pt(atx+bty+ctz+dt=0)的垂直距离,其中低频点云数据所对应点云数据三维坐标到园林基准面pt(atx+bty+ctz+dt=0)的垂直距离为
54、s25:计算得到自适应阈值εt:
55、
56、其中:
57、εt表示用于量化园林基准面第t次迭代结果的拟合效果;
58、s26:将垂直距离小于自适应阈值εt的点云数据三维坐标作为园林基准面pt(atx+
59、bty+ctz+dt=0)的内点,统计园林基准面pt(atx+bty+ctz+dt=0)的内点比例:
60、
61、其中:
62、sumt表示园林基准面pt(atx+bty+ctz+dt=0)的内点数目;
63、pt表示园林基准面pt(atx+bty+ctz+dt=0)的内点比例;
64、s27:对最大迭代次数maxt进行动态调整:
65、
66、其中:
67、maxt表示最大迭代次数在第t次迭代的动态调整结果;
68、p表示期望比例,将p设置为0.95;
69、s28:若t>maxt,则终止基准面迭代,将园林基准面pt(atx+bty+ctz+dt=0)作为最终基准面迭代结果,否则生成园林基准面的第t+1次迭代结果,其中园林基准面的第t+1次迭代结果生成方式为随机选取sumt+1个点云数据三维坐标拟合得到平面方程,将拟合得到得平面方程作为园林基准面的第t+1次迭代结果pt+1(at+1x+bt+1y+
70、ct+1z+dt+1=0),令t=t+1,返回步骤s25。
71、可选地,所述s3步骤中对降噪后的点云数据进行分类聚合,得到景观点云集合,包括:
72、对降噪后的点云数据进行分类聚合,得到景观点云集合,其中景观点云集合的分类聚合流程为:
73、s31:从降噪后的点云数据中提取降噪后的高频点云数据集合;
74、s32:计算得到高频点云数据集合中任意两组高频点云数据的距离信息,其中之间的距离信息为:
75、
76、
77、
78、
79、其中:
80、表示高频点云数据之间的距离信息;
81、表示高频点云数据所对应点云数据三维坐标之间的欧式距离;
82、均为距离信息参数;
83、s33:基于距离信息,计算得到高频点云数据的密度,其中高频点云数据的密度为:
84、
85、其中:
86、表示高频点云数据的密度;
87、exp(·)表示以自然常数为底的指数函数;
88、||·||表示l1范数;
89、s34:按照密度降序对高频点云数据进行排序,根据排序结果,选取排名第一的高频点云数据作为景观点云集合的中心点云数据,并以中心点云数据所对应的点云数据三维坐标为中心,mean为半径划分得到景观区域范围;
90、s34:将区域范围内的所有高频点云数据加入到所选取中心点云数据对应的景观点云集合中,并在当前对高频点云数据集合中删去景观点云集合中的所有点云数据,返回步骤s33,直到当前景观点云集合中不存在高频点云数据,构成w个景观点云集合,其中w的确定公式为:
91、
92、其中:
93、sum(w)表示第w个景观点云集合中,任意两个高频点云数据的距离信息之和。
94、可选地,所述s4步骤中对景观点云集合进行地形信息感知,得到景观信息,包括:
95、对景观点云集合进行地形信息感知,得到景观信息,其中景观信息包括景观中心坐标位置和景观轮廓包络信息,第w个景观点云集合的地形信息感知流程为:
96、从第w个景观点云集合中随机选取四个点云数据的点云数据三维坐标,将点云数据三维坐标构成四面体,若四面体中不存在其他点云数据的点云数据三维坐标,则将四面体的边作为第w个景观的轮廓包络,否则保留四面体内部点云数据的点云数据三维坐标作为四面体顶点,删去距离所保留点云数据三维坐标最近的四面体顶点所对应的点云数据,重复本步骤,得到第w个景观的若干轮廓包络;
97、计算得到轮廓包络中顶点坐标的均值,作为第w个景观的景观中心坐标位置。
98、可选地,所述s5步骤中根据识别得到的园林基准面和景观信息进行园林数字化重建,生成园林深度图像对应的数字孪生结果,包括:
99、根据识别得到的园林基准面和景观信息进行园林数字化重建,得到园林深度图像对应的数字孪生结果,在本发明实施例中,可通过拍摄单一景观深度图像,构建景观的数字孪生结果,与园林景观的数据孪生结果进行组合,并可对景观信息进行参数调整,实现园林景观设计结果的快速修改以及优化,其中园林数字化重建流程为:
100、s51:基于园林基准面初始化生成园林的地形平面,并根据w个景观的景观中心坐标位置确定w个景观在地形平面的地形中心位置;
101、s52:基于景观信息中轮廓包络中的顶点,构建得到w个景观的轮廓包络;
102、s53:将点云数据三维坐标所对应点云数据在rgb颜色通道的像素值作为轮廓包络顶点的颜色信息,结合颜色信息对轮廓包络所构成的边进行颜色渲染,得到园林深度图像对应的数字孪生结果,其中颜色渲染公式为:
103、
104、其中:
105、colordis(k)表示轮廓包络所对应四面体中任意位置dis在k颜色通道的颜色值;
106、dis(q)表示位置dis距离四面体第q个顶点的距离,colorq(k)表示四面体第q个顶点在k颜色通道的颜色值,dis表示预设的最大距离;
107、σ(k)表示四面体中四个顶点在k颜色通道的颜色值标准差,μ(k)表示四面体中四个顶点在k颜色通道的颜色值均值;
108、s54:随机选取园林季节,在景观上方区域的轮廓包络进行结合季节因素的颜色补偿处理,构建得到不同季节下的园林景观数字孪生结果,其中春夏季节的颜色补偿公式为:
109、color*(r)=color(r)+(μg-μr)[1-color(r)]color(g)
110、其中:
111、color(r)表示颜色补偿前r颜色通道的颜色值,color*(r)表示颜色补偿后r颜色通道的颜色值,color(g)表示颜色补偿前g颜色通道的颜色值;
112、μg,μr表示景观上方区域在g颜色通道以及r颜色通道的颜色值均值;
113、秋冬季节的颜色补偿公式为:
114、color*(b)=color(b)+(μg-μb)[1-color(b)]color(g)
115、其中:
116、color(b)表示颜色补偿前b颜色通道的颜色值,color*(b)表示颜色补偿后b颜色通道的颜色值;
117、μb表示景观上方区域在b颜色通道的颜色值均值。
118、为了解决上述问题,本发明提供一种电子设备,所述电子设备包括:
119、存储器,存储至少一个指令;
120、通信接口,实现电子设备通信;及
121、处理器,执行所述存储器中存储的指令以实现上述所述的数字孪生园林景观设计方法。
122、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的数字孪生园林景观设计方法。
123、相对于现有技术,本发明提出一种数字孪生园林景观设计方法,该技术具有以下优势:
124、首先,本方案提出一种景观基准面提取方式,对降噪后的点云数据进行基准面拟合,得到园林基准面,其中基准面拟合流程为:从降噪后的点云数据中提取降噪后的低频点云数据集合;初始化园林基准面p0(a0x+b0y+c0z+d0=0),其中a0,b0,c0,d0均为平面参数初始系数,x,y,z表示点云数据三维坐标的自变量;设置园林基准面的当前迭代次数为t,最大迭代次数为max,则园林基准面的第t次迭代结果为pt(atx+bty+ctz+
125、dt=0),其中at,bt,ct,dt均为平面参数的第t次迭代系数,t的初始值为0;计算得到低频点云数据集合中任意低频点云数据所对应点云数据三维坐标到园林基准面pt(atx+
126、bty+ctz+dt=0)的垂直距离,其中低频点云数据所对应点云数据三维坐标到园林基准面pt(atx+bty+ctz+dt=0)的垂直距离为计算得到自适应阈值εt:
127、
128、其中:εt表示用于量化园林基准面第t次迭代结果的拟合效果;将垂直距离小于自适应阈值εt的点云数据三维坐标作为园林基准面pt(atx+bty+ctz+dt=0)的内点,统计园林基准面pt(atx+bty+ctz+dt=0)的内点比例:
129、
130、其中:sumt表示园林基准面pt(atx+bty+ctz+dt=0)的内点数目;pt表示园林基准面pt(atx+bty+ctz+dt=0)的内点比例;对最大迭代次数maxt进行动态调整:
131、
132、其中:maxt表示最大迭代次数在第t次迭代的动态调整结果;p表示期望比例,将p设置为0.95;若t>maxt,则终止基准面迭代,将园林基准面pt(atx+bty+ctz+dt=0)作为最终基准面迭代结果,否则生成园林基准面的第t+1次迭代结果,其中园林基准面的第t+1次迭代结果生成方式为随机选取sumt+1个点云数据三维坐标拟合得到平面方程,将拟合得到得平面方程作为园林基准面的第t+1次迭代结果pt+1(at+1x+bt+1y+
133、ct+1z+dt+1=0),令t=t+1进行迭代。本方案通过拍摄园林深度图像,并提取表征园林景观边缘的像素点信息构成点云数据,基于点云数据所对应坐标的距离信息实现离群点云数据的过滤处理,并设置自适应阈值以及自适应迭代次数对园林基准面进行迭代,使得迭代后的园林基准面包含尽量多的梯度变化不明显的低频点云数据,实现园林基准面的构建。
134、同时,本方案提出一种点云数据聚类以及数字孪生处理方式,对降噪后的点云数据进行分类聚合,得到景观点云集合,其中景观点云集合的分类聚合流程为:从降噪后的点云数据中提取降噪后的高频点云数据集合;计算得到高频点云数据集合中任意两组高频点云数据的距离信息,其中之间的距离信息为:
135、
136、
137、
138、
139、其中:表示高频点云数据之间的距离信息;表示高频点云数据所对应点云数据三维坐标之间的欧式距离;均为距离信息参数;基于距离信息,计算得到高频点云数据的密度,其中高频点云数据的密度为:
140、
141、其中:表示高频点云数据的密度;exp(·)表示以自然常数为底的指数函数;||·||表示l1范数;按照密度降序对高频点云数据进行排序,根据排序结果,选取排名第一的高频点云数据作为景观点云集合的中心点云数据,并以中心点云数据所对应的点云数据三维坐标为中心,mean为半径划分得到景观区域范围;将区域范围内的所有高频点云数据加入到所选取中心点云数据对应的景观点云集合中,并在当前对高频点云数据集合中删去景观点云集合中的所有点云数据,直到当前景观点云集合中不存在高频点云数据,构成w个景观点云集合,其中w的确定公式为:
142、
143、其中:sum(w)表示第w个景观点云集合中,任意两个高频点云数据的距离信息之和。基于园林基准面初始化生成园林的地形平面,并根据w个景观的景观中心坐标位置确定w个景观在地形平面的地形中心位置;基于景观信息中轮廓包络中的顶点,构建得到w个景观的轮廓包络;将点云数据三维坐标所对应点云数据在rgb颜色通道的像素值作为轮廓包络顶点的颜色信息,结合颜色信息对轮廓包络所构成的边进行颜色渲染,得到园林深度图像对应的数字孪生结果,其中颜色渲染公式为:
144、
145、其中:colordis(k)表示轮廓包络所对应四面体中任意位置dis在k颜色通道的颜色值;dis(q)表示位置dis距离四面体第q个顶点的距离,colorq(k)表示四面体第q个顶点在k颜色通道的颜色值,dis表示预设的最大距离;σ(k)表示四面体中四个顶点在k颜色通道的颜色值标准差,μ(k)表示四面体中四个顶点在k颜色通道的颜色值均值;随机选取园林季节,在景观上方区域的轮廓包络进行结合季节因素的颜色补偿处理,构建得到不同季节下的园林景观数字孪生结果,其中春夏季节的颜色补偿公式为:
146、color*(r)=color(r)+(μg-μr)[1-color(r)]color(g)
147、其中:color(r)表示颜色补偿前r颜色通道的颜色值,color*(r)表示颜色补偿后r颜色通道的颜色值,color(g)表示颜色补偿前g颜色通道的颜色值;μg,μr表示景观上方区域在g颜色通道以及r颜色通道的颜色值均值;秋冬季节的颜色补偿公式为:
148、color*(b)=color(b)+(μg-μb)[1-color(b)]color(g)
149、其中:color(b)表示颜色补偿前b颜色通道的颜色值,color*(b)表示颜色补偿后b颜色通道的颜色值;μb表示景观上方区域在b颜色通道的颜色值均值。本方案结合高频点云数据之间的距离比例计算得到距离信息熵,作为高频点云数据之间的距离信息,并结合距离信息计算得到高频点云数据的密度,实现密度聚类处理,构建得到若干个景观点云集合,分别对每个景观点云集合进行景观中心坐标位置计算以及景观轮廓包络信息提取,根据识别得到的园林基准面和景观信息进行园林数字化重建,其中数字化重建过程包括景观位置坐标重建以及景观颜色渲染处理,得到园林深度图像对应的数字孪生结果,并结合季节信息对不同景观进行颜色补偿,构建得到不同季节下的园林景观数字孪生结果。
- 还没有人留言评论。精彩留言会获得点赞!