位姿标定方法、系统及计算设备与流程
本发明涉及视觉检测,尤其涉及一种位姿标定方法、位姿标定系统及计算设备。
背景技术:
1、目前,随着视觉检测和图像处理技术的发展,单一的二维检测手段已经无法满足更高需求的检测,面阵相机-激光测距传感器组合系统因其结构简单、测量效率高、非接触等特点,已经广泛应用于三维测量领域。在实际工程应用中,通过工业六轴机械臂搭载视觉传感器实现产品的高柔性灵活测量,已经成为机器视觉应用领域的研究热点。
2、对激光测距传感器与面阵相机的空间位姿进行标定,是实现面阵相机-激光测距传感器组合系统进行三维测量的关键步骤,现有技术中广泛使用的标定方法是通过三维标定块完成,该标定方法无法与相机标定流程进行有效结合,增加了标定复杂度。
3、因此,需要一种用于标定激光测距传感器与面阵相机之间的空间位姿的位姿标定方法,以解决上述技术方案中存在的问题。
技术实现思路
1、为此,本发明提供一种位姿标定方法及位姿标定系统,以解决或至少缓解上面存在的问题。
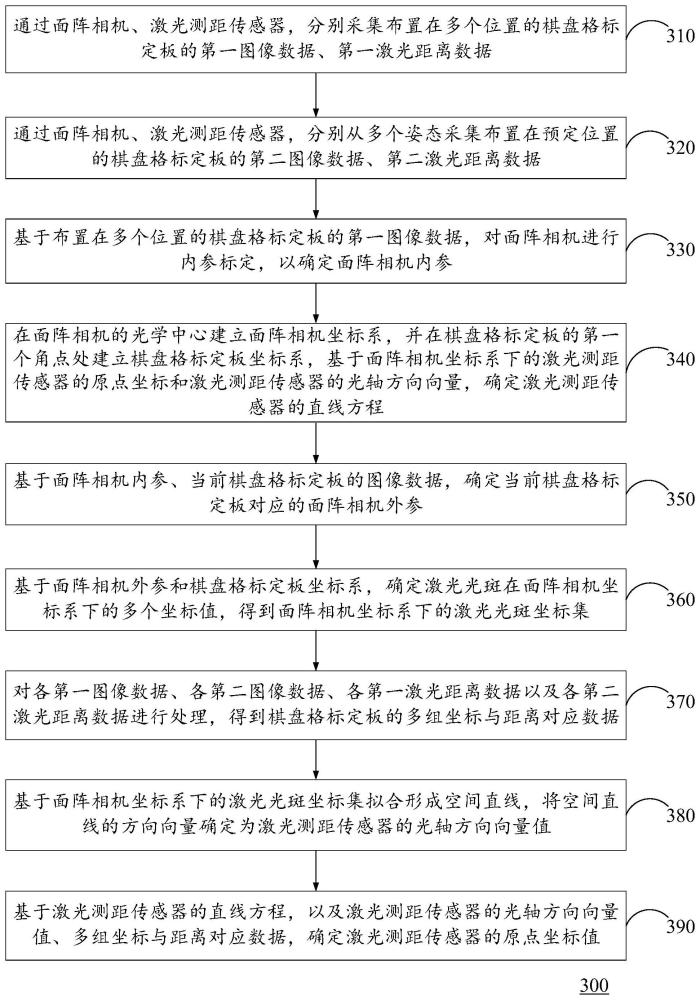
2、根据本发明的一个方面,提供一种位姿标定方法,用于对测量系统的激光测距传感器与面阵相机之间的空间位姿关系进行标定,所述测量系统前方适于布置棋盘格标定板,所述方法包括:通过所述面阵相机、所述激光测距传感器,分别采集布置在多个位置的棋盘格标定板的第一图像数据、第一激光距离数据;通过所述面阵相机、所述激光测距传感器,分别从多个姿态采集布置在预定位置的棋盘格标定板的第二图像数据、第二激光距离数据;基于布置在多个位置的棋盘格标定板的第一图像数据,对所述面阵相机进行内参标定,以确定面阵相机内参;在所述面阵相机的光学中心建立面阵相机坐标系,并在棋盘格标定板的第一个角点处建立棋盘格标定板坐标系,基于面阵相机坐标系下的激光测距传感器的原点坐标和激光测距传感器的光轴方向向量,确定所述激光测距传感器的直线方程;基于所述面阵相机内参、当前棋盘格标定板的图像数据,确定当前棋盘格标定板对应的面阵相机外参;基于所述面阵相机外参和棋盘格标定板坐标系,确定激光光斑在面阵相机坐标系下的多个坐标值,得到面阵相机坐标系下的激光光斑坐标集;对各第一图像数据、各第二图像数据、各第一激光距离数据以及各第二激光距离数据进行处理,得到棋盘格标定板的多组坐标与距离对应数据;基于面阵相机坐标系下的激光光斑坐标集拟合形成空间直线,将所述空间直线的方向向量确定为所述激光测距传感器的光轴方向向量值;基于所述激光测距传感器的直线方程,以及所述激光测距传感器的光轴方向向量值、所述多组坐标与距离对应数据,确定激光测距传感器的原点坐标值。
3、可选地,在根据本发明的位姿标定方法中,基于面阵相机坐标系下的激光测距传感器的原点坐标和激光测距传感器的光轴方向向量,确定所述激光测距传感器的直线方程,包括:在面阵相机坐标系下,定义激光测距传感器的原点坐标为pl0(xl0,yl0,zl0),定义激光测距传感器的光轴方向向量为基于定义的激光测距传感器的原点坐标和激光测距传感器的光轴方向向量,确定激光测距传感器直线方程为其中,t表示长度系数;基于所述激光测距传感器的直线方程,以及所述激光测距传感器的光轴方向向量值、所述多组坐标与距离对应数据,确定激光测距传感器的原点坐标值,包括:将所述激光测距传感器的光轴方向向量值、所述多组坐标与距离对应数据代入所述激光测距传感器的直线方程,并将对应的激光距离数据作为长度系数值,得到激光测距传感器的原点坐标值。
4、可选地,在根据本发明的位姿标定方法中,基于所述面阵相机外参和棋盘格标定板坐标系,确定激光光斑在面阵相机坐标系下的多个坐标值,包括:定义激光光斑在棋盘格标定板坐标系下的坐标;基于所述面阵相机外参、激光光斑在棋盘格标定板坐标系下的坐标,确定激光光斑在面阵相机坐标系下的表达式;在面阵相机的像平面建立像素坐标系;基于所述像素坐标系,确定激光光斑在棋盘格标定板上向行列方投影点坐标大小的比例关系式;基于所述激光光斑在面阵相机坐标系下的表达式、所述比例关系式,确定激光光斑在面阵相机坐标系下的多个坐标值。
5、可选地,在根据本发明的位姿标定方法中,基于所述激光光斑在面阵相机坐标系下的表达式、所述比例关系式,确定激光光斑在面阵相机坐标系下的多个坐标值,包括:基于所述激光光斑在面阵相机坐标系下的表达式、所述比例关系式、激光光斑行方向投影点、激光光斑列方向投影点、像平面上行方向消影点、像平面上列方向消影点,来确定激光光斑在面阵相机坐标系下的多个坐标值。
6、可选地,在根据本发明的位姿标定方法中,还包括:预先将所述测量系统的激光测距传感器和面阵相机安装在工业机械臂末端,以使所述面阵相机成像清晰时所述激光测距传感器在棋盘格标定板上形成的激光光斑位于所述面阵相机的视野中心;保持激光测距传感器与面阵相机的相对位置固定不变。
7、可选地,在根据本发明的位姿标定方法中,通过所述面阵相机、所述激光测距传感器,分别从多个姿态采集布置在预定位置的棋盘格标定板的第二图像数据、第二激光距离数据,包括:将棋盘格标定板布置在预定位置;通过工业机械臂驱动所述面阵相机和所述激光测距传感器运动,以便所述面阵相机、所述激光测距传感器,分别从多个姿态采集布置在预定位置的棋盘格标定板的第二图像数据、第二激光距离数据。
8、可选地,在根据本发明的位姿标定方法中,还包括:基于分别从多个姿态采集的布置在预定位置的棋盘格标定板的第二图像数据,对所述面阵相机与工业机械臂进行手眼标定。
9、可选地,在根据本发明的位姿标定方法中,通过所述面阵相机、所述激光测距传感器,分别采集布置在多个位置的棋盘格标定板的第一图像数据、第一激光距离数据,包括:分别将棋盘格标定板布置在所述测量系统前方的多个位置;针对布置在每一位置的棋盘格标定板,通过所述面阵相机、所述激光测距传感器分别采集棋盘格标定板的第一图像数据、第一激光距离数据。
10、可选地,在根据本发明的位姿标定方法中,基于面阵相机坐标系下的激光光斑坐标集拟合形成空间直线,包括:利用最小二乘法,基于面阵相机坐标系下的激光光斑坐标集拟合形成空间直线。
11、根据本发明的一个方面,提供一种位姿标定系统,包括:测量系统,所述测量系统前方适于布置棋盘格标定板,包括:面阵相机,适于采集布置在多个位置的棋盘格标定板的第一图像数据,并适于从多个姿态采集布置在预定位置的棋盘格标定板的第二图像数据;激光测距传感器,适于采集布置在多个位置的棋盘格标定板的第一激光距离数据,并适于从多个姿态采集布置在预定位置的棋盘格标定板的第二激光距离数据;计算设备,适于执行如上所述的方法,来对测量系统的激光测距传感器与面阵相机之间的空间位姿关系进行标定。
12、根据本发明的一个方面,提供一种计算设备,包括:至少一个处理器;存储器,存储有程序指令,其中,程序指令被配置为适于由上述至少一个处理器执行,所述程序指令包括用于执行如上所述的位姿标定方法的指令。
13、根据本发明的一个方面,提供一种存储有程序指令的可读存储介质,当该程序指令被计算设备读取并执行时,使得该计算设备执行如上所述的位姿标定方法。
14、根据本发明的技术方案,提供了一种位姿标定方法及系统,在对测量系统的激光测距传感器与面阵相机之间的空间位姿关系进行标定的过程中,结合了面阵相机的自标定和手眼标定流程,在采集棋盘格标定板的图像数据时,同步采集了激光测距传感器的激光距离数据,这样,能够同时完成对面阵相机标定以及对激光测距传感器与面阵相机之间的空间位姿关系标定。可见,根据本发明的位姿标定方法,能够将激光测距传感器与面阵相机之间的空间位姿关系标定流程,与相机标定流程进行有效结合,这样,能够提高对激光测距传感器与面阵相机之间的空间位姿关系进行标定的效率,降低标定流程的复杂度。
15、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!