基于深度学习的遥感影像变化检测方法与流程
背景技术:
1、遥感影像变化检测被广泛用于土地利用监测、城市规划、森林管理、农业监测、环境监测等各种遥感应用领域,可以为决策者提供更准确的变化信息,有助于更好地管理资源和环境。为了对遥感影像中的异常变化情况进行检测,常采用孤立森林算法对采集到的遥感影像进行处理,但在孤立森林获取过程中,由于图像变化的特点,变化像素点在孤立森林中可能会有较多的样本点呈现出类似的分布,即出现异常点过多的情况,这会导致孤立森林判断各点异常程度的精确程度下降,使得遥感影像的变化情况检测结果的准确度较低。
技术实现思路
1、为了解决现有方法在对遥感影像的变化情况进行检测时存在的检测结果准确度较低的问题,本发明的目的在于提供一种基于深度学习的遥感影像变化检测方法,所采用的技术方案具体如下:
2、本发明提供了一种基于深度学习的遥感影像变化检测方法,该方法包括以下步骤:
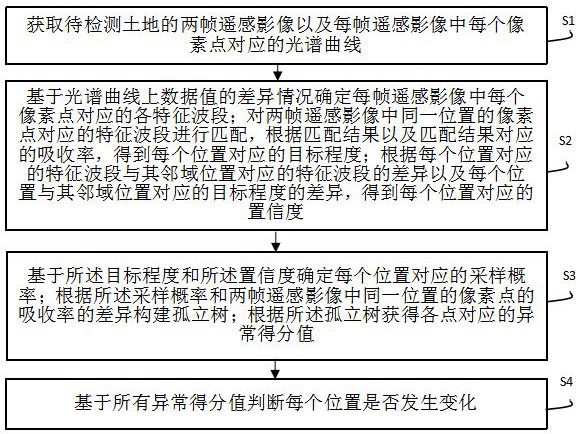
3、获取待检测土地的两帧遥感影像以及每帧遥感影像中每个像素点对应的光谱曲线;
4、基于光谱曲线上数据值的差异情况确定每帧遥感影像中每个像素点对应的各特征波段;对两帧遥感影像中同一位置的像素点对应的特征波段进行匹配,根据匹配结果以及匹配结果对应的吸收率,得到每个位置对应的目标程度;根据每个位置对应的特征波段与其邻域位置对应的特征波段的差异以及每个位置与其邻域位置对应的目标程度的差异,得到每个位置对应的置信度;
5、基于所述目标程度和所述置信度确定每个位置对应的采样概率;根据所述采样概率和两帧遥感影像中同一位置的像素点的吸收率的差异构建孤立树;根据所述孤立树获得各点对应的异常得分值;
6、基于所有异常得分值判断每个位置是否发生变化。
7、优选的,所述基于光谱曲线上数据值的差异情况确定每帧遥感影像中每个像素点对应的各特征波段,包括:
8、对于任意一帧遥感影像中的第i个像素点:
9、将第i个像素点对应的光谱曲线上位于第a个波段的预设邻域内的波段,记为第a个波段对应的参考波段;若第a个波段对应的参考波段中每相邻两个参考波段对应的吸收率的差异均大于或等于预设差异阈值,则将第a个波段确定为第i个像素点对应的特征波段。
10、优选的,所述对两帧遥感影像中同一位置的像素点对应的特征波段进行匹配,根据匹配结果以及匹配结果对应的吸收率,得到每个位置对应的目标程度,包括:
11、对于第k个位置:
12、对于任意一帧遥感影像中的第k个像素点:将第k个像素点对应的所有特征波段对应的吸收率构成的集合记为第k个位置对应的吸收率集合;
13、对第k个位置对应的两个吸收率集合进行匹配获得多个匹配对,每个匹配对中包含两个特征波段,且每个匹配对中的两个特征波段位于不同帧遥感影像中第k个像素点对应的光谱曲线上;
14、根据第k个位置对应的两个吸收率集合之间的dtw距离、每个匹配对中两个特征波段对应的吸收率的差异,得到第k个位置对应的目标程度。
15、优选的,采用如下公式计算第k个位置对应的目标程度:
16、;
17、其中,表示第k个位置对应的目标程度,表示第k个位置对应的两个吸收率集合之间的dtw距离,表示对第k个位置对应的两个吸收率集合进行匹配获得匹配对的数量,表示第j个匹配对中第1个特征波段对应的吸收率,表示第j个匹配对中第2个特征波段对应的吸收率,norm( )表示归一化函数,exp( )表示以自然常数为底数的指数函数,表示取绝对值符号。
18、优选的,根据每个位置对应的特征波段与其邻域位置对应的特征波段的差异以及每个位置与其邻域位置对应的目标程度的差异,得到每个位置对应的置信度,包括:
19、分别对两帧遥感影像中相同位置像素点对应的吸收率做差获得差异影像,在差异影像中,获取每个像素点对应的吸收率集合;
20、对于所述差异图像中的第m个像素点:分别获取第m个像素点对应的吸收率集合与其每个邻域像素点对应的吸收率集合之间的dtw距离;
21、根据第m个像素点与其每个邻域像素点对应的吸收率集合之间的dtw距离、第m个位置与其每个邻域位置对应的目标程度之间的差异,得到第m个位置对应的置信度。
22、优选的,根据第m个像素点与其每个邻域像素点对应的吸收率集合之间的dtw距离、第m个位置与其每个邻域位置对应的目标程度之间的差异,得到第m个位置对应的置信度,包括:
23、计算第m个像素点与其第r个邻域像素点对应的吸收率集合之间的dtw距离的相反数的归一化结果,将所述归一化结果和第m个位置与其第r个邻域像素点对应的目标程度之间的差异的乘积记为第r个邻域像素点对应的第一特征值;
24、将第m个像素点的所有邻域像素点对应的第一特征值的均值,确定为第m个位置对应的置信度。
25、优选的,所述基于所述目标程度和所述置信度确定每个位置对应的采样概率,包括:
26、对于第k个位置:
27、将第k个位置对应的置信度的相反数的归一化结果与第k个位置对应的目标程度的乘积,作为第k个位置的第二特征值;
28、获取每次采样选取的所有位置的第二特征值的和值;
29、将第k个位置的第二特征值与所述和值的比值,作为第k个位置对应的采样概率。
30、优选的,根据所述采样概率和两帧遥感影像中同一位置的像素点的吸收率的差异构建孤立树,包括:
31、根据每个位置的采样概率进行采样,每次选取两个位置进行虚拟样本的构建,第个位置和第个位置加权处理后的数值为:
32、;
33、其中,表示第个位置和第个位置加权处理后的数值,表示第个位置对应的采样概率,表示第个位置对应的采样概率,表示差异影像中第个像素点对应的吸收率,表示差异影像中第个像素点对应的吸收率;
34、基于加权处理后对应的值生成孤立树。
35、优选的,所述基于所有异常得分值判断每个位置是否发生变化,包括:
36、对所有异常得分值进行聚类获得不少于三个聚类簇,分别将每个聚类簇中所有异常得分值的平均值作为每个聚类簇的平均得分;将平均得分最小的聚类簇中异常得分对应的位置作为未发生变化的位置,将平均得分最大的聚类簇中异常得分对应的位置作为发生变化的位置;将所有聚类簇中除平均得分最小的聚类簇和平均得分最大的聚类簇外的其他聚类簇记为待处理聚类簇;
37、将平均得分最小的聚类簇中异常得分对应的位置构成的区域和平均得分最大的聚类簇中异常得分对应的位置构成的区域作为神经网络的训练集,对神经网络进行训练获得训练好的神经网络;
38、将待处理聚类簇中异常得分对应的位置构成的区域输入到训练好的神经网络中,判断待处理聚类簇中异常得分对应的每个位置是否发生变化。
39、优选的,采用k-means聚类算法对所有异常得分值进行聚类。
40、本发明至少具有如下有益效果:
41、本发明首先获取了待检测土地的两帧遥感影像中每个像素点对应的光谱曲线,然后结合两帧遥感影像的相似性,对两帧遥感影像中同一位置的像素点对应的特征波段进行匹配,利用各点的特征波段结合其在不同影像中的变化情况,对每个位置对应的目标程度和置信度进行了评价,结合目标程度和置信度确定了每个位置对应的采样概率,进一步地结合两帧遥感影像中同一位置的像素点的吸收率的差异构建孤立树,确定对应的异常得分值,进而判断每个位置是否发生了变化,本发明提高了待检测土地遥感影像的变化情况检测结果的准确度。
- 还没有人留言评论。精彩留言会获得点赞!