一种锂电池极片露箔缺陷检测方法及装置与流程
本发明涉及缺陷检测,尤其涉及一种锂电池极片露箔缺陷检测方法及装置。
背景技术:
1、锂电池正极通常由碳化锂、氧化钴锂或其他锂化合物构成,这些材料在充电过程中释放锂离子,而在放电过程中吸收锂离子;负极通常由石墨或其他碳材料构成,这些材料在充电过程中吸收锂离子,而在放电过程中释放锂离子。
2、制造锂电池时,一般将正极浆料和绝缘陶瓷间歇涂覆在一块导电性的铝箔上,将负极浆料和绝缘陶瓷间歇涂覆在一块导电性的铜箔上,得到的极片如图1所示。绝缘陶瓷区域1和电极区域2间隙设置。
3、然而,由于铝箔或者铜箔有时存在制造缺陷、电池设计不合理导致电池内部应力集中、涂布技术的不完善导致两种涂覆材料之间有缝隙等原因,会导致锂电池出现露箔,如图2所示,绝缘陶瓷区域1和电极区域2之间、绝缘陶瓷区域1或者电极区域2上出现露箔区域3,如果不经处理,露箔会导致正极箔和负极箔直接接触,使得电池内部的正负极之间发生短路以及电池内部能量释放,严重危害电池的稳定性;还会使电池的性能明显下降,正常运行会受到损害,降低电池的使用寿命;此外,露箔也可能使得电池内的电解液泄漏,损害电池周围的环境和设备。因此,尤其是大面积的露箔,需要在极片切割和卷取之前被检测出来,否则一旦有严重露箔的极片被加工成锂电池,将会造成很大的负面影响。
4、由于露箔的大小、位置、尺寸、形状、亮度均存在很大差异,有些肉眼难以分辨,如果采用人工检测的方法识别露箔,会造成较大误差以及高昂成本。此外,目前极片缺陷检测多采用基于人工智能的方法,例如,专利文献cn 114113137 a 公开了一种薄膜材料的缺陷检测系统及其方法,首先使线阵相机在背光的环境下对薄膜材料拍照,并使用深度学习的方法同时设计在线数据增强方法,使得小样本的数据量得到二次增加,最后使用改进的yolov4检测模型进行薄膜材料的缺陷检测。再如,专利 cn 204202561 u 公开了一种涂布露箔在线检测装置,装置包括使用通过导向杆连接的基架,其中导向杆上设有连接板,连接板上设有方便导向杆的开孔和多个相机。将信号输入单元、信号输出单元与图像处理单元连接,并将相机通过数据线与图像处理单元连接。专利cn 114022418 a 公开了一种锂电池极片缺陷检测方法及系统,首先根据含极片缺陷的锂电池图像,通过图像roi提取算法获取锂电池极片图像,并利用双边滤波算法和多尺度msr算法对极片图像进行去噪和增强;然后利用grabcut算法分割极片图像,并通过形态学处理对分割图像进行优化;最后通过边缘检测算法提取锂电池极片区域的缺陷边缘,采用最小外接矩形法标定缺陷轮廓。
5、上述缺陷检测多采用基于人工智能的方法,如果考虑深度学习的方法来训练模型,一是标注每张图片上露箔的过程非常复杂,耗时很长;二是由于露箔的形态各异,除非标注海量图片以求囊括所有的情况,否则一定会有漏检;三是由于绝缘区域与露箔灰度相近,深度学习会不可避免地将灰色背景当成缺陷。因此,采用现有的深度学习方法进行露箔缺陷检测存在漏检率高、准确性低的问题。
技术实现思路
1、本发明提供了一种锂电池极片露箔缺陷检测方法及装置,能够有效避免锂电池极片露箔缺陷漏检,提高检测的准确性。
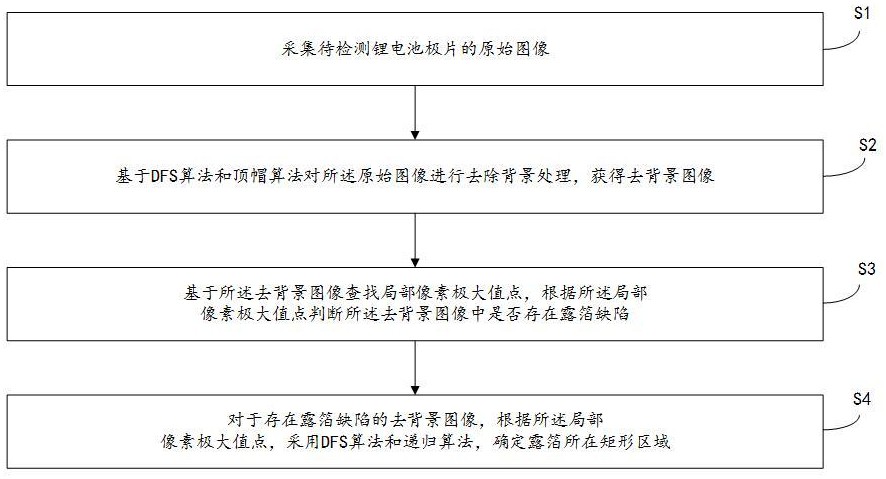
2、一种锂电池极片露箔缺陷检测方法,包括:
3、采集待检测锂电池极片的原始图像;
4、基于dfs算法和顶帽算法对所述原始图像进行去除背景处理,获得去背景图像;
5、基于所述去背景图像查找局部像素极大值点,根据所述局部像素极大值点判断所述去背景图像中是否存在露箔缺陷;
6、对于存在露箔缺陷的去背景图像,根据所述局部像素极大值点,采用dfs算法和递归算法,确定露箔所在矩形区域。
7、进一步地,所述待检测锂电池极片的原始图像中绝缘陶瓷区域和电极区域交替涂覆设置。
8、进一步地,基于dfs算法和顶帽算法对所述原始图像进行去除背景处理,获得去背景图像,包括:
9、以所述原始图像中绝缘陶瓷区域和电极区域交替设置延伸的方向为横向,基于dfs算法和顶帽算法对所述原始图像进行从左到右去背景处理,获得第一去背景图像;
10、基于顶帽算法对所述原始图像进行整体去背景处理,获得第二去背景图像;
11、对所述第一去背景图像和第二去背景图像进行处理,获得所述去背景图像。
12、进一步地,基于dfs算法和顶帽算法对所述原始图像进行从左到右去背景处理,获得第一去背景图像,包括:
13、计算所述原始图像每一列像素的像素均值,将最小像素均值所在的列作为分界列,将所述原始图像分为左边区域和右边区域,所述左边区域包括所述分界列;
14、对所述左边区域,求取第0列的最大像素值,若第0列的最大像素值小于预设最大阈值,则确定第0列为背景,并新建第一队列和输出图像,将所述原始图像的像素赋值给所述输出图像,判断所述左边区域的第0列第0行像素点的像素值是否在预设范围之间,若所述左边区域的第0列第0行像素点的像素值在预设范围之间,则将所述输出图像上对应像素点的像素值设置为0,将对应像素点的行列索引推入所述第一队列,重复如下步骤直到所述第一队列为空:判断所述第一队列是否为空,如果不为空,则弹出先入第一队列的像素点的行列索引,判断弹出队列的像素点四周的像素值是否在所述预设范围内,如果是,则将所述输出图像上对应像素点的像素值设置为0,并将对应的行列索引推入所述第一队列;当所述第一队列为空时,获得的输出图像为左边区域去背景图像;
15、对所述右边区域,设置结构区域图像,将所述结构区域图像与所述左边区域去背景图像进行开运算,获得第一噪点消除图像,新建第一图像,遍历所述左边区域去背景图像,将所述左边区域去背景图像中像素值大于第一预设阈值的像素点的像素值赋值给所述第一图像中对应位置的像素点;将所述左边区域去背景图像中像素值小于或等于第一预设阈值的像素点的像素值与所述第一噪点消除图像中对应像素点的像素值进行相减获得第一差值,若所述第一差值大于0,则将所述第一差值赋值给所述第一图像中对应位置的像素点,若所述第一差值小于或等于0,则将所述第一图像中对应位置的像素点赋值为0,最终获得的所述第一图像为所述第一去背景图像。
16、进一步地,基于顶帽算法对所述原始图像进行整体去背景处理,获得第二去背景图像,包括:
17、设置结构区域图像,将所述结构区域图像与所述原始图像进行开运算,获得第二噪点消除图像,新建第二图像,遍历所述原始图像,将所述原始图像中像素值大于第二预设阈值的像素点的像素值赋值给所述第二图像中对应位置的像素点;将所述原始图像中像素值小于或等于第二预设阈值的像素点的像素值与所述第二噪点消除图像中对应像素点的像素值进行相减获得第二差值,若所述第二差值大于0,则将所述第二差值赋值给所述第二图像中对应位置的像素点,若所述第二差值小于或等于0,则将所述第二图像中对应位置的像素点赋值为0,最终获得的所述第二图像为所述第二去背景图像。
18、进一步地,对所述第一去背景图像和第二去背景图像进行处理,获得所述去背景图像,包括:
19、新建第三图像,将所述第一去背景图像和第二去背景图像中对应的像素值进行比较,并将比较结果中的较小值赋值给所述第三图像,获得所述去背景图像。
20、进一步地,根据所述局部像素极大值点判断所述去背景图像中是否存在露箔缺陷,包括:
21、将所述去背景图像中所有的像素极大值点的行列索引保存在数组中,获得极值数组;
22、将所述局部像素极大值点的像素值与预设值进行比较,若有局部像素极大值点的像素值大于所述预设值,则确定所述去背景图像中存在露箔区域,并将像素值大于所述预设值对应的局部像素极大值点确定为有效极值点。
23、进一步地,根据所述局部像素极大值点,采用dfs算法和递归算法,确定露箔所在矩形区域,包括:
24、计算所有所述有效极值点的像素平均值,将所述像素平均值与预设系数进行相乘,获得乘积;
25、将各个有效极值点的像素值与所述乘积比较,当所述有效极值点的像素值大于所述乘积时,确定相应的有效极值点位于露箔所在区域;
26、对露箔所在区域的当前有效极值点,建立其所在矩形区域的高度最大值行索引、高度最小值行索引、宽度最大值列索引以及宽度最小值列索引,并将所述高度最大值行索引和高度最小值行索引的初值赋值为所述当前有效极值点的纵坐标,将宽度最大值列索引以及宽度最小值列索引的初值赋值为当前有效极值点的横坐标;
27、执行如下dfs算法和递归算法:
28、设置第一阈值,所述第一阈值为当前有效极值点在所述原始图像中的像素值;
29、设置第二阈值,新建第二队列和第四图像,将所述原始图像的像素值赋值给所述第四图像;
30、若所述当前有效极值点的像素值大于0,则将所述当前有效极值点的行列索引推入所述第二队列,并将当前有效极值点对应于所述第四图像中的像素点的像素值设置为0;
31、迭代执行如下步骤,直到所述第二队列为空,获得露箔所在矩形区域四个顶点的行列索引:
32、判断所述第二队列是否为空,如果不为空,则弹出最先入列的行列索引,根据弹出的行列索引查找所述去背景图像中对应的像素点的上方、下方、左侧和右侧是否存在像素点;
33、若存在上方像素点,且所述上方像素点对应于所述第四图像中的像素点的像素值大于所述第二阈值且小于所述第一阈值,则将所述上方像素点的行列索引推入所述第二队列,若所述上方像素点的行索引小于高度最小值行索引,则将所述高度最小值行索引更新为所述上方像素点的行索引,并设置所述第四图像中对应于所述上方像素点的像素值为0;
34、若存在下方像素点,且所述下方像素点对应于所述第四图像中的像素点的像素值大于所述第二阈值且小于所述第一阈值,则将所述下方像素点的行列索引推入所述第二队列,若所述下方像素点的行索引小于高度最大值行索引,则将所述高度最大值行索引更新为所述下方像素点的行索引,并设置所述第四图像中对应于所述下方像素点的像素值为0;
35、若存在左侧像素点,且所述左侧像素点对应于所述第四图像中的像素点的像素值大于所述第二阈值且小于所述第一阈值,则将所述左侧像素点的行列索引推入所述第二队列,若所述左侧像素点的列索引小于宽度最小值列索引,则将所述宽度最小值列索引更新为所述左侧像素点的列索引,并设置所述第四图像中对应于所述左侧像素点的像素值为0;
36、若存在右侧像素点,且所述右侧像素点对应于所述第四图像中的像素点的像素值大于所述第二阈值且小于所述第一阈值,则将所述右侧像素点的行列索引推入所述第二队列,若所述右侧像素点的列索引小于宽度最大值列索引,则将所述宽度最大值列索引更新为所述右侧像素点的列索引,并设置所述第四图像中对应于所述右侧像素点的像素值为0。
37、进一步地,获得露箔所在矩形区域四个顶点的行列索引之后,还包括:
38、设置第三阈值;
39、计算露箔所在矩形区域的面积,若所述面积小于或等于预设面积,且露箔所在矩阵区域的长和宽均大于0,则遍历所述露箔所在矩形区域中的每个像素点,若像素点在所述极值数组内且该像素点的像素值大于第三阈值,保持露箔所在矩形区域四个顶点的高度最大值行索引、高度最小值行索引、宽度最大值列索引以及宽度最小值列索引不变,将当前有效极值点更新为该像素点,并再次执行dfs算法和递归算法,扩大矩形范围,获得最终矩形区域,并将所述最终矩阵区域内的像素置黑;
40、若所述面积大于所述预设面积,或者露箔所在矩阵区域的长或宽等于0,则求解所述矩形区域内的像素最大值点,若所述像素最大值点大于预设最大值,则遍历所述露箔所在矩形区域中的每个像素点,若像素点在所述极值数组内且该像素点的像素值大于第三阈值,保持露箔所在矩形区域四个顶点的高度最大值行索引、高度最小值行索引、宽度最大值列索引以及宽度最小值列索引不变,将当前有效极值点更新为该像素点,并再次执行dfs算法和递归算法,扩大矩形范围,获得最终矩形区域,并将所述最终矩阵区域内的像素置黑;若所述像素最大值点小于或等于所述预设最大值,则放弃所述矩形区域。
41、一种上述方法的锂电池极片露箔缺陷检测装置,包括:
42、采集模块,用于采集待检测锂电池极片的原始图像;
43、去背景模块,基于dfs算法和顶帽算法对所述原始图像进行去除背景处理,获得去背景图像;
44、缺陷判断模块,基于所述去背景图像查找局部像素极大值点,根据所述局部像素极大值点判断所述去背景图像中是否存在露箔缺陷;
45、区域确定模块,用于对存在露箔缺陷的去背景图像,根据所述局部像素极大值点,采用dfs算法和递归算法,确定露箔所在矩形区域。
46、本发明提供的锂电池极片露箔缺陷检测方法及装置,至少包括如下有益效果:
47、(1)基于dfs算法、顶帽算法、求极值算法以及递归算法即可有效的检测出锂电池极片上的露箔缺陷,无需海量的样本进行训练,节省人力,有效避免锂电池极片露箔缺陷漏检,提高检测的准确性;
48、(2)基于dfs算法、顶帽算法、求极值算法以及递归算法,只需设置合理的阈值参数,即可进行锂电池极片的露箔缺陷检测,普适性强,易于实现,不需要额外设备或者高性能服务器,有效降低生产成本,并大大提升了检测速度;
49、(3)不仅能够检测出露箔缺陷,还可以获取露箔大致的大小,为是否弃用极片提供参考。
- 还没有人留言评论。精彩留言会获得点赞!