基于三维点云技术的冲压模架磨损检测方法与流程
本发明涉及三维建模,具体涉及基于三维点云技术的冲压模架磨损检测方法。
背景技术:
1、冲压技术作为五金行业的重要生产方式,其冲压产品的精度在于模具和模具架之间的精确程度,模具和模架之间由于冲压产品会导致产生磨损影响产品的精确度的同时还会影响生产的速度,当其磨损到一定程度时需要对其进行平磨处理。在对模架的磨损进行检测时可以通过双目相机采集其对应的三维点云数据,三维点云相对于二维图像可以更好的观察采集的冲压模架的磨损情况。由于空气中水汽的影响或者受到周围的风、周围物体的震动等影响等,产生的噪声点,不仅会增加点云的数据量,还会影响建模、信息提取的精度,不利于后续的模架的磨损检测的准确性。
2、对双目相机采集的模架的三维点云数据进行去噪处理,对去噪后的点云数据进行特征分析判断其模架的磨损情况。在对采集的三维点云数据进行去噪时可以通过三维高斯滤波对采集的点云数据进行处理,通过三维高斯函数对采集的点云数据进行卷积操作可以对其进行去噪处理,但是其对采集的三维点云平滑操作会影响对磨损情况的检测,平滑后的三维点云数据会将正常的判定为磨损严重,影响对模架磨损情况判定的准确性。在通过高斯函数对点云数据进行卷积时,可以分析每个数据点自身的携带信息对通过距离计算获取的卷积权重进行修正,更大程度的保留点云数据携带的纹理信息。
技术实现思路
1、为了解决磨损检测精度较低的技术问题,本发明提供了基于三维点云技术的冲压模架磨损检测方法,所采用的技术方案具体如下:
2、本发明提出了基于三维点云技术的冲压模架磨损检测方法,该方法包括以下步骤:
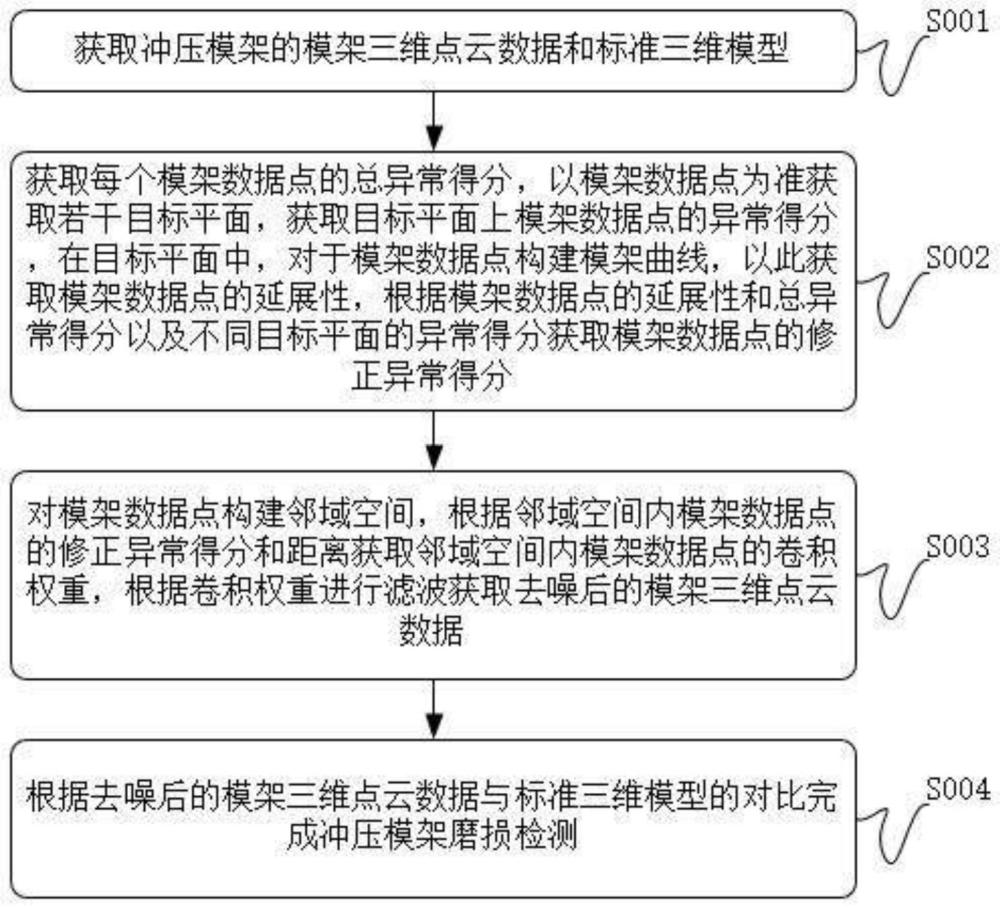
3、获取冲压模架的模架三维点云数据和标准三维模型;
4、对模架三维点云数据使用异常检测算法获取每个模架数据点的异常得分记为总异常得分;将任意一个模架数据点记为目标模架数据点,对于目标模架数据点获取若干平面记为目标平面,获取在此目标平面下目标模架数据点的异常得分;在每个目标平面中,根据目标模架数据点与其相邻模架数据点的异常得分差异构建模架曲线;根据模架曲线中每个模架数据点的斜率获取目标模架数据点的延展性;根据目标模架数据点的延展性、目标模架数据点的总异常得分以及目标模架数据点在不同目标平面的异常得分获取目标模架数据点的修正异常得分;
5、对于任意一个模架数据点构建邻域空间,根据模架数据点之间的差异获取模架数据点的最大异常差异;根据模架数据点的最大异常差异以及邻域空间内模架数据点的修正异常得分和距离中心点的欧氏距离获取邻域空间内每个模架数据点卷积权重;对于任意一个模架数据点根据其邻域空间内模架数据点的卷积权重进行卷积计算获取去噪后的模架三维点云数据;
6、根据去噪后的模架三维点云数据与标准三维模型的对比完成冲压模架磨损检测。
7、优选的,所述获取冲压模架的模架三维点云数据和标准三维模型的方法为:
8、采用双目立体相机拍摄冲压模架不同方位的深度图,对于不同方位的深度图进行特征点匹配获取三维点云数据;
9、将未磨损的冲压模架的三维点云数据记为标准三维模型,将待检测的冲压模架的三维点云数据记为模架三维点云数据。
10、优选的,所述对模架三维点云数据使用异常检测算法获取每个模架数据点的异常得分记为总异常得分的方法为:
11、通过孤立森林算法对模架三维点云数据进行处理获取模架数据点的异常得分,孤立森林的数据集为整个模架三维点云数据,进行数据划分的特征为模架数据点之间的欧式距离,样本点为模架三维点云数据中的每个模架数据点,将模架数据点的异常得分记为总异常得分。
12、优选的,所述对于目标模架数据点获取若干平面记为目标平面,获取在此目标平面下目标模架数据点的异常得分的方法为:
13、对于目标模架数据点,将经过目标模架数据点的任意一个平面记为目标平面,将目标平面向垂直于目标平面的方向旋转,每旋转10度获取一个平面,旋转后的平面同样经过目标模架数据点,将旋转后经过目标模架数据点的平面也记为目标平面;
14、使用获取总异常得分的计算方法获取每个目标平面下每个模架数据点的异常得分。
15、优选的,所述根据目标模架数据点与其相邻模架数据点的异常得分差异构建模架曲线的方法为:
16、对于每个目标平面,将目标模架数据点记为待测模架数据点,以待测模架数据点为中心点获取3*3大小的邻域,将待测模架数据点与其邻域内每个模架数据点的异常得分作差,并将差值的绝对值归一化作为待测模架数据点与邻域内模架数据点的异常差异,若异常差异小于预设阈值,则将邻域内模架数据点作为待测模架数据点的相似数据点,待测模架数据点的最小异常差异的相似数据点作为下一个待测模架数据点,将待测模架数据点与下一个待测模架数据点相连,对于下一个待测模架数据点同样计算异常差异获取其下一个待测模架数据点,并与下一个待测模架数据点相连,直到待测模架数据点与其邻域内模架数据点的异常差异都大于预设阈值为止,此时得到的所有待测模架数据点的连线记为模架曲线。
17、优选的,所述根据模架曲线中每个模架数据点的斜率获取目标模架数据点的延展性的方法为:
18、
19、式中,mi表示第i个模架数据点对应的模架曲线上模架数据点的数量,ki,l表示第i个模架数据点对应的模架曲线上第l个模架数据点的斜率,εi表示第i个模架数据点对应的模架曲线的分布均匀性,exp()表示以自然常数为底的指数函数,nrom()表示线性归一化函数,yzi表示第i个模架数据点在对应目标平面上的延展性;所述第i个模架数据点为目标模架数据点;
20、将每个目标平面上的第i个模架数据点的延展性求均值作为第i个模架数据点的延展性。
21、优选的,所述根据目标模架数据点的延展性、目标模架数据点的总异常得分以及目标模架数据点在不同目标平面的异常得分获取目标模架数据点的修正异常得分的方法为:
22、
23、式中,yz′i表示第i个模架数据点的延展性,di表示数据集为模架三维点云数据时第i个模架数据点的异常得分,dz,i表示数据集为第z个目标平面时第i个模架数据点的异常得分,n表示目标平面的数量,norm()表示线性归一化函数,di′表示数据集为模架三维点云数据时第i个模架数据点的修正异常得分;所述第i个模架数据点为目标模架数据点。
24、优选的,所述对于任意一个模架数据点构建邻域空间,根据模架数据点之间的差异获取模架数据点的最大异常差异的方法为:
25、将任意一个模架数据点记为中心模架数据点,计算中心模架数据点与其邻域空间内每个模架数据点的修正异常得分的差值,将差值的最大值记为中心模架数据点的最大异常差异。
26、优选的,所述根据模架数据点的最大异常差异以及邻域空间内模架数据点的修正异常得分和距离中心点的欧氏距离获取邻域空间内每个模架数据点卷积权重的方法为:
27、
28、式中,δdc′表示第c个模架数据点的最大异常差异,dc′,k表示第c个模架数据点的邻域空间中第k个模架数据点的修正异常得分,lc,k表示第c个模架数据点的邻域空间中第k个模架数据点与第c个模架数据点的欧氏距离,r表示邻域空间中模架数据点的数量,exp()表示以自然常数为底的指数函数,wc,k表示第c个模架数据点的邻域空间中第k个模架数据点的卷积权重。
29、优选的,所述根据去噪后的模架三维点云数据与标准三维模型的对比完成冲压模架磨损检测的方法为:
30、对去噪后的模架三维点云数据与标准三维模型使用ppf算法进行特征点匹配,若匹配的特征点数量大于等于90%,则去噪后的冲压模架的三维模型不存在磨损;若匹配的特征点数量大于等于80%且小于90%,则冲压模架轻微磨损;若匹配的特征点数量大于等于70%且小于80%,则冲压模架中度磨损;若匹配的特征点数量大于等于60%且小于70%,则冲压模架重度磨损,若匹配的特征点数量小于60%,则冲压模架完全损坏。
31、本发明具有如下有益效果:本发明相对于现有技术的好处在于分析采集的三维点云数据自身的变化情况,通过孤立森林算法对采集的点云数据进行异常得分计算,分析同一个数据点在不同的样本空间中的稳定性和其在整体空间的延展性对异常得分进行修正。根据修正后的异常得分进行判断其进行卷积时的增强情况,根据修正后的异常得分对卷积权重进行调整,根据调整后的权重进行卷积操作获取到去噪后的点云信息。避免了直接通过距离获取权重导致其获取的模架点云数据的边缘处被过度的平滑,导致其正常的模架因为上述操作被确认为磨损状态,影响识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!