基于三维精细数据的文物病害自动高精度提取方法
本发明属于文化遗产数字化保护领域,涉及一种基于三维精细数据的文物病害自动高精度提取方法。
背景技术:
1、文物表面病害检测是文物保护中的重要内容。传统的文物病害调查从最初的以简单工具测量的文字记录、影像记录,发展到对文物对象可量测正射影像的手动文物调查、自动调查。虽然基于正射影像的图像分割提取病害应用比较成熟,但是提取结果始终是二维信息,对于一些曲率较大的表面,在提取精度上会大大降低。而且对于复杂的对象,如彩塑文物,常规的前、后、左、右、上、下六张正射平面投影图并不能展示出全部的病害,病害调查的数量和精度都会受到一定的影响。随着数字摄影测量、三维激光扫描、三维建模等技术的发展越来越成熟,文物三维精细数字化为文物表面病害调查提供了最全面、精准的数据,文物病害的提取也势必从二维转到三维中进行。现阶段可以通过点云数据提取文物残缺或裂隙病害,但只能提取一些几何差异较大或变形较大的病害,对于一些只体现在色彩差异上的病害将无法提取。也有学者实现在三维模型上手动框选病害区域、定义病害类型和统计病害几何信息。但这种方法只是将二维手动矢量化变成三维手动矢量化,效率较低且精度受人为因素影响。目前没有一种可以直接在三维精细彩色模型上高精度自动提取文物病害的方法。如能够直接利用上述三维数据进行自动病害调查,既可免去制作二维正射影像的工序,又能在三维模型上自动提取最真实、最全面的病害信息,为文物修复和保护工作提供准确、全面的数据支撑。因此,对文物病害的三维自动调查具有重要的现实意义和应用价值。
技术实现思路
1、本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
2、本发明还有一个目的是提供一种基于三维精细数据的文物病害自动高精度提取方法,。
3、为此,本发明提供的技术方案为:
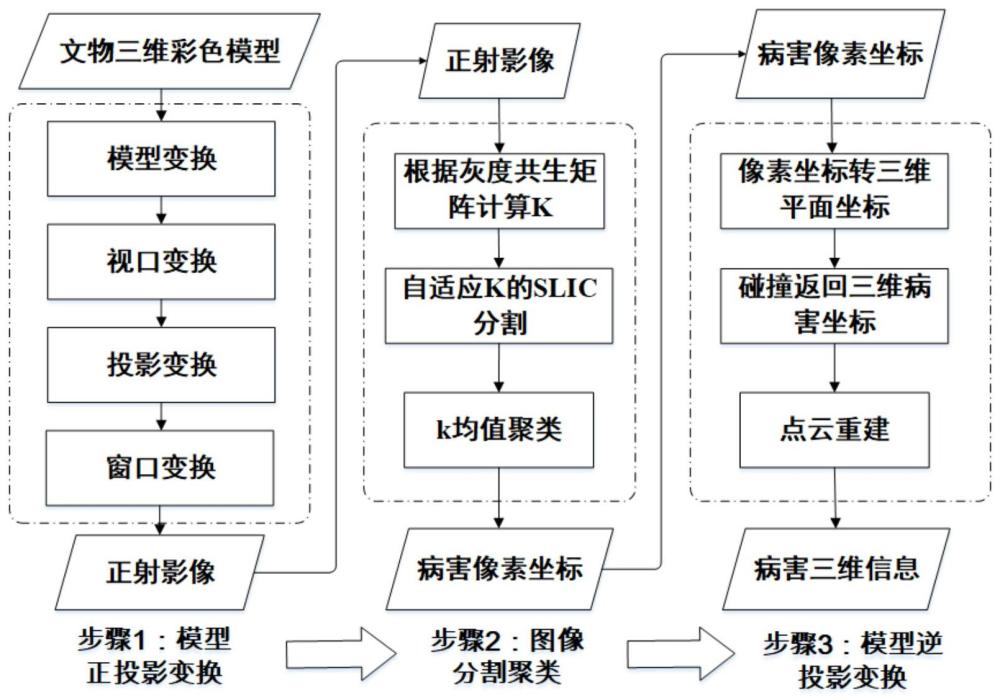
4、一种基于三维精细数据的文物病害自动高精度提取方法,包括如下步骤:
5、步骤一、获取文物的附带投影参数的正射影像;
6、步骤二、根据图像复杂度计算灰度共生矩阵对所述正射影像进行自适应k值的slic图像分割聚类,包括:
7、2.1)依据式(13)计算所述正射影像的自适应超像素个数k,即k表示slic进行超像素分割的预分割个数
8、
9、其中,w表示图像的宽,h表示图像的高,tk表示图像本身的复杂度,表示上取整;
10、2.2)根据计算得到的k值进行slic分割:首先依据所述自适应超像素个数,在图像内均匀地分配种子点;然后在聚类中心的n邻域内重新选取聚类中心,n为正整数,计算每个所述邻域内所有像素点的灰度梯度,并遍历各领域内像素的梯度值,最后将值最小的像素点作为调整后的聚类中心;再以调整后的聚类中心为搜索中心,以若干部中心间距为邻域搜寻范围,给分割图像每个原始像素点构建中心标识,以确定每个像素点可能隶属的聚类中心,且对于每个搜索到的所述像素点,分别计算所述像素点与搜索到其的种子点的距离,取最小值对应的种子点作为所述像素点的聚类中心,对图像进行超像素分割;
11、2.3)对所述超像素分割结果进行k均值聚类分割,将文物的病害像素坐标提取出来;
12、步骤三、将文物的所述病害像素坐标转换到三维平面坐标中,得到病害的三维坐标信息,然后对所述病害三维坐标进行三维重建,得到病害的三维几何信息。
13、优选的是,所述的基于三维精细数据的文物病害自动高精度提取方法中,步骤2.1)中,得到所述适应超像素个数k的计算公式的步骤包括:
14、首先,利用灰度共生矩阵描述的图像复杂度计算自适应超像素分割个数k,针对图像数据本身特点,引入信息熵,即某种特定信息出现的概率,熵值越大,则图像越复杂,反之,越简单。信息熵(ent,用eent表示)的计算式如下:
15、
16、式中k代表广义集合内不同标志值的个数,ni代表灰度值为i的像素点个数,n代表整幅图像内像素点的个数。灰度共生矩阵具有典型度量特征的参数有:能量(e)、对比度(con,用ccon表示)、相关度(cor,用ccor表示)。图像复杂度tk计算公式如下:
17、tk=eent+ccon-e-ccor (6)
18、其中,
19、
20、
21、式中:q2(i,j,d,θ)是通过灰度共生矩阵归一化处理得到;m表示图像在平面内x轴方向上的像素数;n表示图像所在平面内y轴方向上的像素数;θ表示灰度共生矩阵的生成方向,可以取0°、45°、90°、135°;其中:
22、
23、
24、u1,u2是均值,d1,d2表示方差,p(i,j,d,θ)表示灰度共生矩阵中第i行,第j列元素所代表的像素信息;
25、建立了所述自适应超像素个数k的计算公式:
26、
27、优选的是,所述的基于三维精细数据的文物病害自动高精度提取方法中,步骤2.2)中,所述像素点与其周围种子点的距离度量d'如下:
28、
29、其中,dc代表颜色距离,ds代表空间距离,m为紧凑度,每个超像素的大小为n/k,n为图像像素个数,则相邻种子步长近似为s=sqrt(n/k)。
30、优选的是,所述的基于三维精细数据的文物病害自动高精度提取方法中,
31、
32、
33、
34、其中,ns是类内最大空间距离,定义为ns=s,适用于每个聚类,经计算得:
35、
36、优选的是,所述的基于三维精细数据的文物病害自动高精度提取方法中,步骤一中,获取文物的附带投影参数的正射影像的方法包括:
37、模型变换(m),将文物三维彩色模型从物方坐标转换到世界坐标中;
38、视口变换(v),将模型信息从世界坐标转换到相机三维坐标中,公式如下:
39、
40、投影变换(p),将三维坐标信息转化到二维坐标中,公式如下:
41、
42、窗口变换(w),将视口裁剪后的结果映射到屏幕中,通过viewport获取屏幕显示区域的大小,将帧缓冲区域内的数据转变为能显示在屏幕上的像素,公式如下:
43、
44、通过以上四个步骤,总结公式如下:
45、
46、得到文物的附带投影参数的正射影像。
47、优选的是,所述的基于三维精细数据的文物病害自动高精度提取方法中,步骤三中,将步骤2.3)中得到的所述病害像素坐标根据投影矩阵参数,返还至投影平面,再通过坐标点由法线方向与三维模型碰撞,得到所述病害的三维空间坐标,包括如下步骤:
48、首先根据mvpw矩阵中的窗口变换参数,将屏幕像素坐标(u,v)转换为投影平面坐标(x,y),转换公式如下:
49、
50、式中w,h分别为正射影像的宽和高,r是模型最小包围盒半径
51、然后将投影平面坐标反投影回三维模型坐标:将投影坐标先转化到三维中,将上述(x,y)变成(x,y,0),再以z轴为法线与三维模型求得交点(x,y,z);
52、最后将返还后的病害三维坐标在经过视口变换的逆过程,得到病害真实的三维坐标信息。
53、优选的是,所述的基于三维精细数据的文物病害自动高精度提取方法中,步骤2.2)中,每个所述超像素的大小为n/k,n为图像像素个数,则相邻种子步长近似为s=sqrt(n/k)。
54、优选的是,所述的基于三维精细数据的文物病害自动高精度提取方法中,步骤2.3)中,所述k均值聚类分割包括如下步骤:a)簇个数k的选择;b)各个样本点到簇中心的距离;c)根据新划分的簇,更新簇中心;d)重复上述b)、c)过程,直至簇中心没有移动。
55、优选的是,所述的基于三维精细数据的文物病害自动高精度提取方法中,步骤二还包括:
56、2.4)迭代优化:不断迭代直到误差收敛;
57、2.5)对属于同类的临近超像素分割的区域进行连通处理。
58、本发明至少包括以下有益效果:
59、本发明研究方法激活了文保单位现存的大量三维精细数据,把数据挖掘和分析从常规的二维数据转换到三维数据,在精度和效率上更符合数据的科学利用,具有一定的科研价值、引领价值和现实意义。
60、本发明在精度上高于现有二维正射影像上病害自动提取方法,因为二维正射影像本质上二维信息,调查的病害不够全面,而且对于曲率较大的表面,提取精度大大降低。本发明利用二三维数据转化,使得二维提取结果返还到三维模型上,最终得到的是病害的三维信息。
61、本发明在效率和精度上都高于现有三维矢量化手动提取方法,因为三维矢量化需要人为手动点选病害边缘,效率低下,而且提取精度受人为因素影像。本发明结合图像分割算法,实现自动提取,同时应用二三维数据转换,自动得到病害三维信息,不仅大大节省了手动点选的时间,同时提升了病害提取的准确性。
62、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!