智能服务机器人的芯片算法、芯片、设备及存储介质的制作方法
本技术涉及数据处理,尤其涉及一种智能服务机器人的芯片算法、芯片、设备及存储介质。
背景技术:
1、随着人工智能技术的不断发展和应用,智能清洁设备如拖地机器人已成为人们日常生活中的重要辅助工具,然而,传统的拖地机器人主要依赖预设的清洁模式调整清洁参数,用户在使用时,需要根据自己的需求选择拖地机器人的清洁模式,以调整拖地机器人的清洁参数,这种方法的智能化程度较低,在一些特定条件下,无法实现有效清洁。
技术实现思路
1、本技术提供一种智能服务机器人的芯片算法、装置、设备及存储介质,以解决上述背景技术提出的问题。
2、第一方面,本技术提供一种智能服务机器人的芯片算法,所述算法用于调整拖地机器人的清洁参数,所述算法包括:
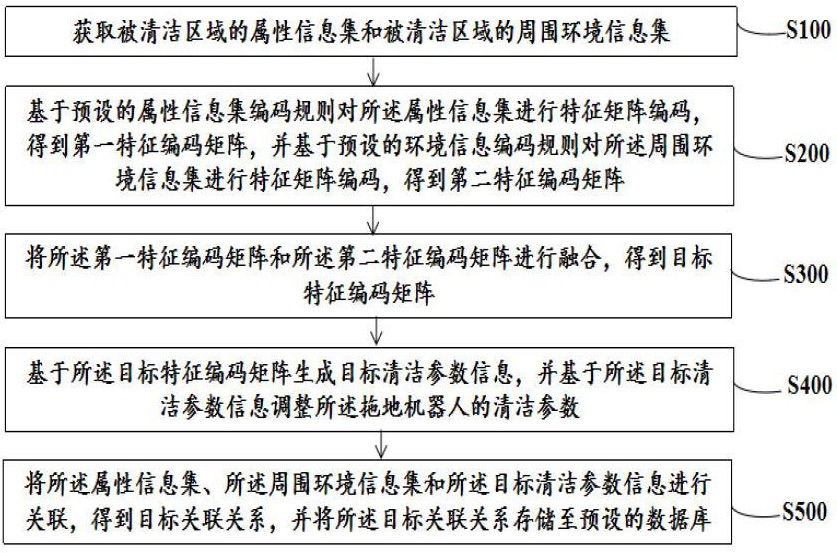
3、获取被清洁区域的属性信息集和被清洁区域的周围环境信息集;
4、基于预设的属性信息集编码规则对所述属性信息集进行特征矩阵编码,得到第一特征编码矩阵,并基于预设的环境信息编码规则对所述周围环境信息集进行特征矩阵编码,得到第二特征编码矩阵;
5、将所述第一特征编码矩阵和所述第二特征编码矩阵进行融合,得到目标特征编码矩阵;
6、基于所述目标特征编码矩阵生成目标清洁参数信息,并基于所述目标清洁参数信息调整所述拖地机器人的清洁参数;
7、将所述属性信息集、所述周围环境信息集和所述目标清洁参数信息进行关联,得到目标关联关系,并将所述目标关联关系存储至预设的数据库。
8、在一种可能的实现方式中,在所述获取被清洁区域的属性信息集和被清洁区域的周围环境信息集之前,所述算法还包括:
9、获取第一位置信息和第二位置信息;其中,所述第一位置信息为拖地机器人当前的位置信息,所述第二位置信息为所述被清洁区域的指定位置的位置信息;
10、基于所述第一位置信息和所述第二位置信息控制所述拖地机器人运动至所述被清洁区域的指定位置。
11、在一种可能的实现方式中,在所述基于预设的属性信息集编码规则对所述属性信息集进行特征矩阵编码,得到第一特征编码矩阵之前,所述算法还包括:
12、判断预设的数据库中是否存在与所述属性信息集、所述周围环境信息集关联的历史清洁参数信息;
13、若不存在,则执行所述基于预设的属性信息集编码规则对所述属性参数信息进行特征矩阵编码,得到第一特征编码矩阵。
14、在一种可能的实现方式中,所述属性信息集包括多种不同类型的属性信息,所述基于预设的属性信息集编码规则对所述属性信息集进行特征矩阵编码,得到第一特征编码矩阵,包括:
15、获取各个不同类型的所述属性信息的第一编号,并基于各个所述第一编号在预设的数据库中获取各个所述属性信息的初始编码向量和第一编码标准;其中,所述初始编码向量包括第一标识元素和多个元素空位;
16、针对各个所述属性信息,基于所述属性信息对应的第一编码标准对所述属性信息进行编码处理,得到第一编码元素,并将所述第一编码元素依序插入所述属性信息对应的初始编码向量的元素空位,得到第一目标编码向量;
17、基于各个所述第一目标编码向量对应的所述第一编号,将各个所述第一目标编码向量由上往下依次排列,得到所述第一特征编码矩阵。
18、在一种可能的实现方式中,所述周围环境信息集包括多种不同类型的环境信息,所述基于预设的环境信息编码规则对所述周围环境信息集进行特征矩阵编码,得到第二特征编码矩阵,包括:
19、获取各个不同类型的所述环境信息的第二编号,并基于各个所述第二编号在预设的数据库中获取各个所述环境信息的标准编码矩阵和第二编码标准;
20、针对各个所述环境信息,将所述环境信息对应的标准编码矩阵在指定位置的元素作为第二目标编码向量的第二标识元素,并基于所述环境信息对应的第二编码标准对所述环境信息进行编码处理,得到第二编码元素,及基于预设的元素组合方式将所述第二标识元素和所述第二编码元素进行组合,得到第二目标编码向量;
21、基于各个所述第二目标编码向量对应的所述第二编号,将各个所述第二目标编码向量由上往下依次排列,得到所述第二特征编码矩阵。
22、在一种可能的实现方式中,所述将所述第一特征编码矩阵和所述第二特征编码矩阵进行融合,得到目标特征编码矩阵,包括:
23、针对所述第一特征编码矩阵的各个第一目标编码向量,判断所述第二特征编码矩阵中是否存在所述第一目标编码向量的关联第二目标编码向量;其中,所述第一目标编码向量的第一标识元素与所述关联第二目标编码向量的第二标识元素具有相同的字母或数字;
24、若存在,将所述第一目标编码向量作为融合标识元素,并将所述第一目标编码向量的第一编码元素和所述关联第二目标编码向量的第二编码元素进行融合,得到融合编码元素,及基于预设的元素组合方式将所述融合标识元素和所述融合编码元素进行组合,得到第一目标特征编码向量;
25、若不存在,将所述第一目标编码向量作为第二目标特征编码向量;
26、在所述第二特征编码矩阵中确定第三目标特征编码向量;其中,所述第三目标特征编码向量是不与任一所述第一目标编码向量关联的第二目标编码向量;
27、基于预设的向量排序规则将各个所述第一目标特征编码向量、各个所述第二目标特征编码向量和各个所述第三目标特征编码向量依序排列,得到所述目标特征编码矩阵。
28、在一种可能的实现方式中,在将所述目标关联关系存储至预设的数据库之前,所述算法还包括:
29、在所述第一特征编码矩阵、所述第二特征编码矩阵和所述目标特征编码矩阵中提取未重复出现的矩阵元素,得到目标矩阵元素;其中,所述目标矩阵元素包括数字和字母;
30、在预设的数据库中获取加密表;其中,所述加密表包括数字和字母;
31、在所述目标矩阵元素中确定加密数字和加密字母;其中,所述加密数字为所述目标矩阵元素中未在所述加密表中出现的数字,所述加密字母为所述目标矩阵元素中未在所述加密表中出现的字母;
32、基于预设的密码组合方式将所述加密数字和所述加密字母进行组合,得到加密密码;
33、基于所述加密密码对所述目标关联关系进行加密。
34、第二方面,本技术提供一种芯片,所述芯片用于调整拖地机器人的清洁参数,所述芯片包括:
35、获取模块,用于获取被清洁区域的属性信息集和被清洁区域的周围环境信息集;
36、编码模块,用于基于预设的属性信息集编码规则对所述属性信息集进行特征矩阵编码,得到第一特征编码矩阵,并基于预设的环境信息编码规则对所述周围环境信息集进行特征矩阵编码,得到第二特征编码矩阵;
37、融合模块,用于将所述第一特征编码矩阵和所述第二特征编码矩阵进行融合,得到目标特征编码矩阵;
38、调整模块,用于基于所述目标特征编码矩阵生成目标清洁参数信息,并基于所述目标清洁参数信息调整所述拖地机器人的清洁参数;
39、存储模块,用于将所述属性信息集、所述周围环境信息集和所述目标清洁参数信息进行关联,得到目标关联关系,并将所述目标关联关系存储至预设的数据库。
40、第三方面,本技术提供一种终端设备,所述终端设备包括处理器、存储器以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如上所述的智能服务机器人的芯片算法。
41、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其中,所述计算机程序被处理器执行时,实现如上所述的智能服务机器人的芯片算法。
42、本技术提供了智能服务机器人的芯片算法、芯片、设备及存储介质,其中,所述算法用于调整拖地机器人的清洁参数,所述算法包括:获取被清洁区域的属性信息集和被清洁区域的周围环境信息集;基于预设的属性信息集编码规则对所述属性信息集进行特征矩阵编码,得到第一特征编码矩阵,并基于预设的环境信息编码规则对所述周围环境信息集进行特征矩阵编码,得到第二特征编码矩阵;将所述第一特征编码矩阵和所述第二特征编码矩阵进行融合,得到目标特征编码矩阵;基于所述目标特征编码矩阵生成目标清洁参数信息,并基于所述目标清洁参数信息调整所述拖地机器人的清洁参数;将所述属性信息集、所述周围环境信息集和所述目标清洁参数信息进行关联,得到目标关联关系,并将所述目标关联关系存储至预设的数据库。该算法,一方面,通过将所述第一特征编码矩阵和所述第二特征编码矩阵进行融合,得到目标特征编码矩阵,并基于所述目标特征编码矩阵生成目标清洁参数信息,及基于所述目标清洁参数信息调整所述拖地机器人的清洁参数,能够提高所述拖地机器人的智能化程度,使所述拖地机器人在特定的环境条件下,实现有效地清洁,另一方面,将所述属性信息集、所述周围环境信息集和所述目标清洁参数信息进行关联,得到目标关联关系,并将所述目标关联关系存储至预设的数据库,能够在下次对所述被清洁区域进行清洁时,当检测到的属性参数集和周围环境信息集与所述目标关联关系中的属性参数集和周围环境信息集一致时,直接利用所述目标关联关系中的目标清洁参数调整所述拖地机器人的清洁参数,有助于提高所述拖地机器的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!