一种多星协同最优观测方法
本发明属于sar卫星对地观测成像,尤其涉及一种多星协同最优观测方法。
背景技术:
1、自从1978第一颗sar卫星(seasat-a)发射以来,sar卫星飞速发展,至今取得了极为瞩目的成就,在对地观测领域已经成为一种不可或缺的手段。但在轨运行的sar卫星仍然有一些不足:目前 sar 卫星的轨道高度大约在500~1 000 km,重访周期短则几天长则十几天,无法对目标区域进行高频率或者应急观测成像;除此之外前后视时多普勒带宽过小,单星sar一般只能进行侧视成像。近年来,世界主要航天大国非常重视 sar 卫星组网观测技术的发展,目前已建成了多个sar 卫星星座系统:意大利的csk星座、欧空局的sentinel-1星座、加拿大的 radarsat 星座、中国的高分三号及陆探星座。sar星座可以通过多星组网大大缩短重访周期,从而显著提高对地观测能力,满足对热点区域的高频率观测需求。在卫星平台及sar低成本、小型化的背景下,星座组网正成为sar对地观测发展的主要方向之一。
2、理论上多星协同对某一区域目标进行观测为多边形几何覆盖问题的变种,本质上是一个np-hard组合优化问题,目前国内外对此研究比较少,现有技术大多采用启发式算法或者遗传算法试图寻找一个最优或者次优的观测方案。
3、现有算法的研究对象大多是光学卫星,并未综合考虑卫星和目标区域的几何关系,其算法只有理论指导意义,并不能对实际的多星协同区域观测任务进行处理。多颗sar卫星协同观测问题(multiple sar satellites cooperative observation problem forarea target, msp)。msp是一个多星任务规划问题,同时也是一个复杂的高维度组合优化问题。针对该问题的求解工作具有很大的挑战性,求解过程中涉及到的主要难点如下:
4、1) 该问题是一个np-hard组合优化问题,其解空间规模和问题的规模呈指数关系。sar卫星的数量越多则协同的难度越大,但协同观测的能力也越强;
5、2) 该问题涉及到多颗sar卫星针对区域目标的多次观测机会,需要综合考虑升降轨的情况,观测机会之间的耦合关系很难分析,所以不同观测机会的条带之间可能会有大量重叠;
6、3) 对该问题进行建模时需要综合考虑sar卫星的时间、角度和能量等多种约束;
7、4) 每次观测机会的开关机时间和下视角均从连续空间取值,所以理论上解空间的规模为无穷大。
8、求解msp时需要综合考虑用户需求和sar卫星的约束条件,合理分配sar卫星的观测资源,为区域目标制定相应的观测策略。
技术实现思路
1、针对传统三阶段规划方法存在的问题,本发明提出了一种多星协同最优观测方法,做出的主要改进如下所示:
2、1) 通过分析msp的时间、角度和能量等约束,本发明建立了msp的约束满足模型,进而在该模型的基础上提出了一种新型三阶段规划方法。本发明提出的新型规划方法的三个阶段分别为:不规则区域目标网格化、基于网格分割的基本观测模式设计、观测方案生成。
3、2) 新型三阶段规划方法在第一阶段中将任意形状的区域目标网格化从而便于计算观测方案的观测率,随后在第二阶段中利用区域目标的网格动态生成基本观测模式,每一个基本观测模式对应一个条带,最后在第三阶段中通过优化算法选择基本观测模式子集从而生成观测方案。
4、3) 本发明在第一阶段设计了归一化的区域目标网格化算法。相对于传统三阶段规划方法中只能处理矩形区域的网格化算法,本发明归一化的区域目标网格化算法可以将任意形状的区域目标网格化;本发明在第二阶段设计了基于网格分割的基本观测模式生成算法。传统三阶段规划方法中基于并行分割的条带生成方式无法处理面积过大的区域目标,且条带的数量和灵活性都在一定程度上受限。本发明基于网格分割的基本观测模式生成算法可以处理任意大小的区域目标并生成更多更灵活的条带;本发明在第三阶段设计了串行的变邻域禁忌搜索算法。相对于传统三阶段规划方法中的标准遗传算法,本发明提出的变邻域禁忌搜索算法可以生成质量更高的观测方案。
5、本发明提出一种多星协同最优观测方法,所述方法包括以下步骤:
6、步骤1. 建立约束满足模型;
7、步骤2. 不规则区域目标网格化;
8、步骤3. 基于网格分割的基本观测模式设计;
9、步骤4. 最优观测方案生成。
10、进一步,步骤1建立的约束满足模型为:
11、首先,模型中使用的参数如下文所示定义:
12、:用户针对特定区域的成像需求,与相关的参数如下所示:
13、:待观测的大范围区域目标;
14、:任务开始时间;
15、:任务结束时间;
16、:执行观测任务的sar卫星集合,与相关的参数如下所示:
17、:的单次最大开机时长;
18、:的最大下视角;
19、:任务周期内的观测机会集合,与相关的参数如下所示:
20、:的观测开始时间;
21、:的观测结束时间;
22、:的基本观测模式集合,与相关的参数如下所示:
23、:的开机时间;
24、:的关机时间;
25、:的下视角;
26、其中,i表示卫星,j表示观测机会,k表示观测模式;
27、:分段线性函数;定义了观测收益和观测率之间的映射关系;
28、:面积计算函数;用来计算具体观测方案在该任务中观测到的面积;
29、决策变量为:
30、,
31、约束条件为:
32、⑴ 基本观测模式数量约束:
33、,
34、为的基本观测模式;
35、每个观测机会只能选择一个基本观测模式,即卫星每次过境只能观测一个长度可变宽度不变的条带区域;
36、⑵ 时间窗口约束:
37、,
38、,
39、所有的观测机会必须在任务周期内执行,一个观测机会对应多个基本观测模式,所有基本观测模式的开关机时间均要满足观测机会的成像时间窗口约束;
40、⑶ 角度约束:
41、,
42、sar卫星的侧视能力是有限的,所以每个基本观测模式选择的下视角必须满足对应sar卫星的侧视能力的约束条件;
43、⑷ 能量约束:
44、,
45、表示卫星i最大开机时间;
46、sar卫星依靠太阳能维持电力系统并执行成像任务,所以每个基本观测模式的开机时间是有限的,开机时长必须满足sar卫星的能量约束;
47、目标函数为:
48、,
49、其中,u表示求并集;
50、目标是为每一个观测机会选择对应的基本观测模式,从而使得选中的基本观测模式子集获取最大的观测收益。
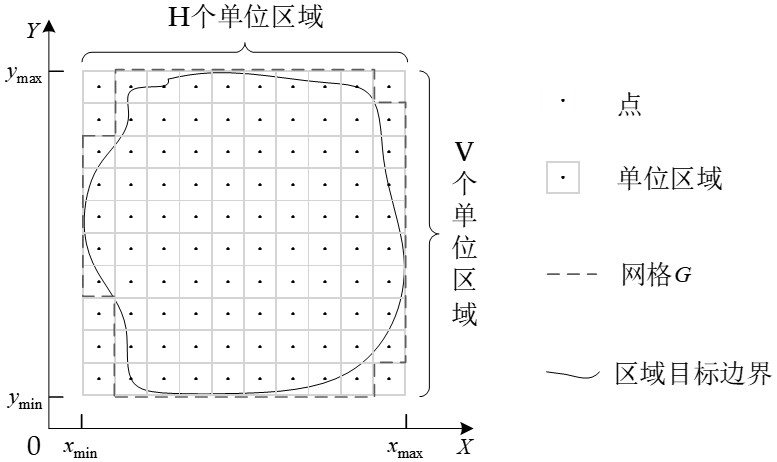
51、进一步,步骤2的具体实现方法为,其中,输入为区域目标,输出为区域目标网格;包括以下步骤:
52、步骤2.1.建立参考坐标系;
53、步骤2.2.计算区域目标在该坐标系下的最小横坐标、最大横坐标、最小纵坐标、最大纵坐标;
54、步骤2.3.根据、、和建立一个矩形区域;
55、步骤2.4.以特定的步长将矩形区域划分成一组小正方形区域,每一个正方形区域记为一个单元,在单元的中心布点来代表该正方形区域;
56、步骤2.5.统计和区域目标有相交区域的单元;
57、步骤2.6.将步骤5中的单元集合记为区域目标网格,输出。
58、进一步,步骤3的具体实现方法为,其中,输入为观测机会和区域目标网格,输出为基本观测模式集合;包括以下步骤:
59、步骤3.1.令基本观测模式集合;指的是空集;
60、步骤3.2.统计处于观测机会视场中的单元,将视场中的单元集合记为;
61、步骤3.3.如果则转步骤3.13;否则在中选出单元子集,使得中的单元作为位于条带上边的上单元;
62、步骤3.4.如果则转步骤3.13;否则选择单元作为上单元;
63、步骤3.5.根据在中选出单元子集,使得中的单元作为位于条带下边的下单元;
64、步骤3.6.如果则转步骤3.11;否则选择单元作为下单元;
65、步骤3.7.根据和在中选出单元子集,使得中的单元作为位于条带侧边的侧单元;
66、步骤3.8.根据和在中选出单元子集,使得中的单元作为位于条带侧边的侧单元;如果则转步骤12;否则选择单元作为下单元;
67、步骤3.9.如果三个单元满足所有约束,则根据和观测机会生成基本观测模式;
68、步骤3.10.令基本观测模式集合,,转步骤3.8;其中,\代表除操作;
69、步骤3.11.令,转步骤3.4;
70、步骤3.12.令,转步骤3.6;
71、步骤3.13.输出基本观测模式集合。
72、进一步,步骤4的具体实现方法为,其中,输入为cpu运行时间、禁忌长度、切换邻域状态的迭代次数;输出为最优观测方案;包括以下步骤:
73、步骤4.1.令cpu运行时间为、代表邻域状态的二元变量为0、切换邻域状态的迭代次数为、禁忌长度为,置空禁忌表;
74、步骤4.2.随机生成初始解,将初始解作为当前解和当前最优解;
75、步骤4.3.如果则转步骤4.4;否则转步骤4.5;
76、步骤4.4.构造一步迭代邻域,随机选择个观测机会,在当前解的基础上遍历个基本观测模式从而生成个邻域候选解,转步骤4.6;n指的是一个观测机会的观测模式数量;
77、步骤4.5.构造两步迭代邻域,随机选择两个未被禁忌的观测机会,在两个观测机会中各选个基本观测模式进行排列组合从而生成个邻域候选解,转步骤4.6;
78、步骤4.6.从邻域中选出最优候选解,如果最优候选解优于当前最优解,则用其代替当前解和当前最优解,否则选择非禁忌状态的最优候选解作为当前解,如果则转步骤4.7;否则转步骤4.8;
79、步骤4.7.解禁禁忌长度为1的禁忌对象,将禁忌表中各禁忌对象的禁忌长度全部减1,禁忌步骤4.4中选中的观测机会,设置其禁忌长度为,转步骤4.9;
80、步骤4.8.解禁禁忌长度为1和禁忌长度为2的禁忌对象,将禁忌表中各禁忌对象的禁如果cpu运行超时则转步骤4.11;否则转步骤4.3;忌长度全部减2;禁忌步骤4.5中选中的两个观测机会,设置其禁忌长度为,转步骤4.9;
81、步骤4.9.如果步骤4.6中的当前最优解连续代未更新,则切换的状态;
82、步骤4.10.如果cpu运行超时则转步骤4.11;否则转步骤4.3;
83、步骤4.11.将当前最优解作为最优观测方案,输出最优观测方案。
84、本发明具有以下有益技术效果:
85、1) 本发明提出了一种多星协同最优观测方法,即不规则区域目标网格化、基于网格分割的基本观测模式设计、观测方案生成。在第一阶段中将任意形状的区域目标网格化从而便于计算观测方案的观测率。在第二阶段中利用第一阶段的网格动态生成基本观测模式,在基本观测模式生成的过程中综合考虑sar卫星的下视角和开关机时间,从而生成更多更灵活的条带。在第三阶段中设计更有效的优化算法,进而寻找全局更优的观测方案;在前两个阶段中分别设计了归一化的区域目标网格化算法和基于网格分割的基本观测模式生成算法,在第三阶段中分别设计了串行的变邻域禁忌搜索算法和并行的结合邻域搜索的遗传算法。
86、2) 相对于传统三阶段规划方法,本发明提出的一种多星协同最优观测方法可以处理任意大小和形状的区域目标,并在同等观测资源下获取了更大的观测收益。此外,在建模过程中sar卫星采用的是条带模式,所以新型三阶段规划方法同样适用于光学卫星和sar卫星的混合规划任务。
- 还没有人留言评论。精彩留言会获得点赞!