一种轨道车辆异常检测方法及系统与流程
本发明涉及轨道车辆检测的,更具体的说是涉及一种轨道车辆异常检测方法及系统。
背景技术:
1、轨道车辆运行安全一直备受广泛瞩目,然而,传统轨道车辆检测方法主要仰赖人工巡视,却存在效率低下和容易受到人为干扰等问题,因此,基于机器视觉的轨道车辆异常检测技术正成为研究和应用领域的热点。
2、一般情况下,轨道车辆的底部装有成千上万个零部件,每天都有众多列车需要接受巡检和维护,对车辆部件的安全状况检测是一项极为繁重的任务,传统的检修方法主要依赖人工巡检,工人必须在列车进入库房后依次检查每个部件,发现故障后记录在检修表上,并在维修完成后进行上报。
3、相较于传统的人工巡视方法,技术演变广泛应用机器视觉对轨道车辆异常进行检测,其中检测技术利用高分辨率图像或视频数据,借助图像处理和目标检测,实现了轨道车辆行为的自动检测和识别,但是现有的检测和识别的手段均是将图像中的目标与数据库中的标准进行相似度比较,以判断图像中是否存在异常物,该种方法容易出现遗漏,且比较准确度较低,比较耗时,难以满足现有的检测方式。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种轨道车辆异常检测方法,该种异常检测方法及系统能够全天候监控轨道车辆,不受时间和环境条件的制约,从而显著提高了监测效率和准确性。
2、为实现上述目的,本发明提供了如下技术方案:
3、一种轨道车辆异常检测方法,包括如下步骤:
4、数据采集汇总步骤,获取龙门架上各处的相机拍摄到的车底图像进行汇总得到待检图像总数据;
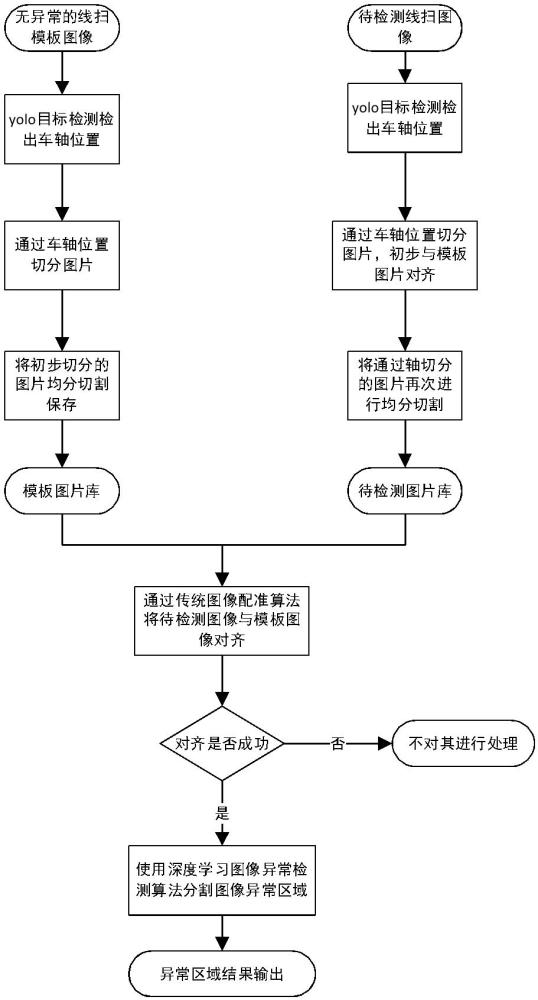
5、车轴区域提取步骤,通过预先训练的yolo模型对待检图像总数据进行筛选提取得到车轴区域图像;
6、图像切分拼接步骤,将所述待检图像总数据根据定位的车轴为依据以切分策略进行切分得到若干张等均的车底认证图像;
7、图像验证配准步骤,将每张完整的车底认证图像依次与预设的车轴模板图像以特征点配对为依据进行对齐配准,若对齐配准失败,则忽略该张车底认证图像,若对齐配准成功,则进行异常识别;
8、异常区域识别步骤,通过系统预设的模型训练数据集以深度学习策略构建图像差异检测模型,将所述车底认证图像与图像差异检测模型进行比较,若存在差异,则分割出对应的异常区域。
9、进一步的,还包括异常类型输出步骤和异常类型补充步骤;
10、异常类型输出步骤,获取数据库中各类异常图像,将所述异常图像中的异常情况转换为文字含义输出至数据库中,以所述文字含义以及对应的异常图像进行归类划表得到异常类型表,将所述异常区域在异常类型表中索引对应的文字含义作为本次异常情况输出;
11、异常类型补充步骤,当所述异常区域未索引到对应的文字含义时,通过人工识别输入对应的文字含义作为补充类型,且将所述补充类型填入异常类型表中。
12、进一步的,所述切分策略包括图像分段子步骤以及图像筛切子步骤;
13、所述图像分段子步骤,将所述车轴区域图像以轨道车辆的车轴拍摄顺序为依据进行切割得到若干段车底粗图像,每段所述车底粗图像中均包括一个完整的车轴;
14、所述图像筛切子步骤,在所述车底粗图像以车轴的位置为依据,对每段所述车底粗图像进行等尺寸切割得到车底认证图像。
15、进一步的,所述图像验证配准步骤,通过orb特征检测器提取车底认证图像和车轴模板图像的特征点,根据暴力匹配获得车底认证图像与车轴模板图像之间特征点的匹配点对,以gms算法对所述匹配点对进行优化,若所述车底认证图像与车轴模板图像之间的匹配点数大于阈值,则通过计算图像配准变换的矩阵,得到配准的待检图。
16、进一步的,所述图像验证配准步骤中包括验证校准子步骤,若所述车底认证图像与车轴模板图像之间的匹配点数小于阈值,则通过akaze特征检测器提取车底认证图像和车轴模板图像的特征点,根据暴力匹配获得车底认证图像与车轴模板图像之间特征点的匹配点对,以gms算法对所述匹配点对进行优化,若所述车底认证图像与车轴模板图像之间的匹配点数大于阈值,则通过计算图像配准变换的矩阵,得到配准的待检图,若所述车底认证图像与车轴模板图像之间的匹配点数小于阈值,则放弃该张车底认证图像和车轴模板图像。
17、进一步的,所述异常区域识别步骤包括模型训练子步骤、模型优化子步骤以及模型验证子步骤;
18、所述模型训练子步骤,通过系统预设的模型训练数据集以深度学习策略构建图像差异检测模型;
19、所述模型优化子步骤,获取模型训练数据集中的预测值和真实值通过交叉熵损失函数算式计算得到损失值,以所述损失值对图像差异检测模型进行补偿优化;
20、所述模型验证子步骤,定义车底认证图像中的变化区域为正,背景区域为负,通过获取分析所述车底认证图像中的正样本识别的数量、误报的负样本数量、负样本被正确识别的数量以及漏报的正样本的数量代入评价算式中计算得到评价分值,若所述评价分值大于等于阈值,则输出模型准确,若所述评价分值小于阈值,则输出模型有误。
21、进一步的,所述交叉熵损失函数算式配置为:
22、
23、其中,--第个像素的预测值,--第个像素的真实值;
24、所述评价算式配置为:
25、
26、
27、
28、其中,--准确率,--为召回率,--正样本被识别的数量,--误报的负样本的数量,--负样本被正确识别的数量,--漏报的正样本的数量。
29、进一步的,所述车轴区域提取步骤,将所述待检图像总数据进行去噪和/或尺度调整得到处理后的图像总数据,再将图像总数据输入yolo模型中进行目标检测得到车轴区域图像。
30、进一步的,所述异常类型表中的文字含义包括悬挂物、零部件丢失以及零部件异位。
31、一种轨道车辆异常检测系统,包括:
32、图像采集模块,用于获取龙门架上各处的相机拍摄到的车底图像进行汇总得到待检图像总数据;
33、图像处理模块,通过预先训练的yolo模型对待检图像总数据进行筛选提取得到车轴区域图像,将所述待检图像总数据根据定位的车轴为依据以切分策略进行切分得到若干张等均的车底认证图像,将每张完整的车底认证图像依次与预设的车轴模板图像以特征点配对为依据进行对齐配准,若对齐配准失败,则忽略该张车底认证图像,若对齐配准成功,则进行异常识别,通过系统预设的模型训练数据集以深度学习策略构建图像差异检测模型,将所述车底认证图像与图像差异检测模型进行比较,若存在差异,则分割出对应的异常区域;
34、输出交互模块,预设有异常类型表,将所述异常区域在异常类型表中索引对应的文字含义作为本次异常情况输出;
35、异常报警模块,当接收到本次异常情况输出时,发出警报指令。
36、本发明的有益效果:1、通过龙门架上的相机多角度拍摄轨道车辆的底部图像,再通过模型的匹配筛查自动将图像中具有车轴的部分保留,再经过切分的方式将连续的图像进行分割得到每张尺寸相同且均具有对应的车轴的认证图像,将认证图像与预设的图像进行匹配点的配准,将配准成功的图像进行异常分析,该种由初图像处理分析的方式相对于现有的图像点云的异常识别方式,更能准确的将异常区域在图像中以像素的方式划出,且对于后续的异常类型分析提供了有效的依据来源。
37、2、相较于传统的人工巡视方法,基于机器视觉的轨道车辆异常检测技术利用高分辨率图像或视频数据,借助图像处理、目标检测和模式识别等技术,实现了轨道车辆行为的自动检测和识别,首先,机器视觉方法能够全天候监控轨道车辆,不受时间和环境条件的制约,从而显著提高了监测效率和准确性;其次,机器视觉技术可以运用先进的目标检测和语义分割模型,以实现对车辆的精确检测,准确地发现车底、车侧和车顶部件的损坏和脱落等情况。
- 还没有人留言评论。精彩留言会获得点赞!