一种施工安全教育用VR眼镜检测系统及方法与流程
本技术涉及施工安全教育,更具体地说,涉及一种施工安全教育用vr眼镜检测系统及方法。
背景技术:
1、施工安全教育是为了提高施工现场工作人员的安全意识和技能,预防事故和伤害的发生,向施工人员传达重视安全的意识,让他们明白施工安全对于个人和团队的重要性。可以通过会议、培训、宣传等方式向他们强调安全事故的后果,并提醒他们每个人的责任,为施工人员提供必要的安全培训,包括作业规程、安全操作规范、紧急情况应急处理等。确保他们理解和掌握相关的安全知识和技能,如正确使用个人防护装备、使用安全工具和设备等。
2、现有技术公开号为cn110648564a的文献提供一种基于bim和vr技术的施工安全教育装置,包括主控制器、vr设备、bim模型以及情景模拟单元,主控制器分别连接情景模拟单元、bim模型和vr设备;bim模型还包括bim数据库,bim用于构建建筑设置三维数据模型并存储到bim数据库供主控制器调取,主控制器将bim数据库建筑设施的三维数据模型转换成用于vr设备的三维模型并在vr设备上显示;情景模拟单元用于危险情景模拟。该装置通过vr头戴显示器可以让体验者进行沉浸式的直观感受,本发明中的情景模拟装置可以让体验者体验到不同的感官体验,可以让学员体验到模拟真实场景时学员应当采取的应对策略,提升安全教育的实际效果。
3、上述中的现有技术方案虽然通过现有技术的结构可以实现与有关的有益效果,但是仍存在以下缺陷;该技术在进行使用时通过vr头戴显示器进行施工安全教育,由于为了使得施工人员均进行施工安全教育,需要vr头戴显示器的分批使用,此时由于该装置不便于对vr头戴显示器表面进行破损检测,导致在vr头戴显示器使用过程中出现人为的意外损坏时,难以及时找到负责人,造成经济损失,
4、鉴于此,我们提出一种施工安全教育用vr眼镜检测系统及方法。
技术实现思路
1、1.要解决的技术问题
2、本技术的目的在于提供一种施工安全教育用vr眼镜检测系统,解决了上述背景技术中提出的技术问题,实现了对vr设备破损监测的技术效果。
3、2.技术方案
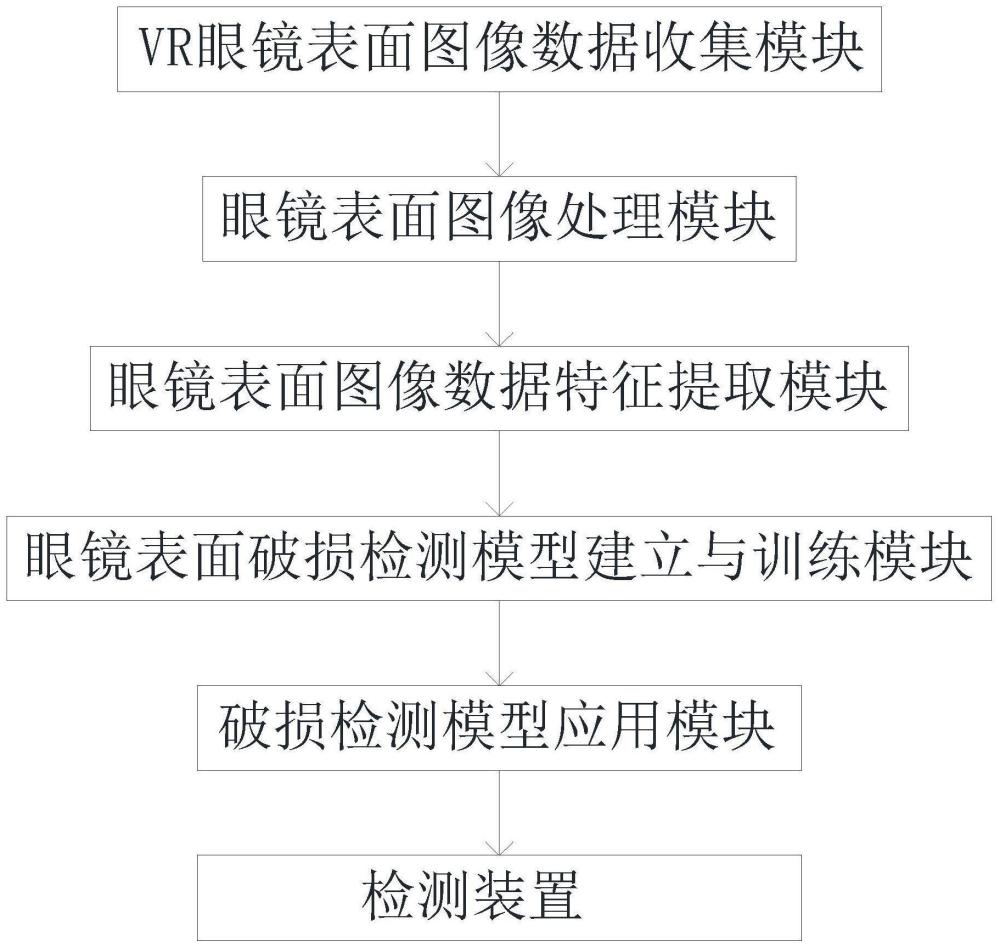
4、本技术实施例提供了一种施工安全教育用vr眼镜检测系统,包括:vr眼镜表面图像数据收集模块、眼镜表面图像处理模块、眼镜表面图像数据特征提取模块、眼镜表面破损检测模型与训练模块、检测装置和及破损检测模型应用模块;
5、vr眼镜表面图像数据收集模块:所述vr眼镜表面图像数据收集模块通过在vr施工安全教育设备上安装摄像设备采集vr眼镜表面图像数据;
6、眼镜表面图像处理模块:所述眼镜表面图像处理模块对收集到的图像进行预处理,包括调整图像大小、标准化像素值等;
7、眼镜表面图像数据特征提取模块:所述眼镜表面图像数据特征提取模块通过使用计算机视觉技术,如边缘检测、纹理特征提取等,从图像中提取有助于破损检测的特征数据;
8、眼镜表面破损检测模型与训练模块:所述眼镜表面破损检测模型与训练模块通过使用机器学习算法,如卷积神经网络(cnn)模型,并利用提取的特征对模型进行训练处理;
9、破损检测模型应用模块:所述破损检测模型应用模块通过使用训练好的模型对采集的新的vr眼镜表面图像进行破损检测;
10、检测装置,用于对vr眼镜进行夹持和检测。
11、作为本技术文件技术方案的一种可选方案,所述vr眼镜表面图像数据收集模块采集使用后的vr眼镜的表面图像,同时收集大量包含不同类型破损的vr眼镜表面图像,破损包括划痕、裂纹、凹陷等,同时,还需要收集一些正常的、无破损的图像作为对照数据。
12、作为本技术文件技术方案的一种可选方案,所述眼镜表面图像处理模块包括调整图像大小、标准化像素值,所述调整图像大小:通过将收集的图像的大小调整为固定的尺寸,这样能够确保所有图像具有相同的大小,方便后续处理和模型输入,所述标准化像素值:接下来,能够使用零均值和单位方差对像素值进行归一化对图像的像素值进行标准化,从而减少图像之间的亮度差异,使得模型更容易学习到有用的特征。
13、作为本技术文件技术方案的一种可选方案,所述眼镜表面图像数据特征提取模块包括边缘检测和纹理特征提取;
14、所述边缘检测:边缘是图像中亮度变化的地方,能够提供物体形状和边界的重要信息,通过利用canny边缘检测算法能够将这些算法应用于眼镜表面图像,以检测出图像中的边缘;
15、所述纹理特征提取:纹理是图像中具有重复、规律性或统计特性的局部结构,通过灰度共生矩阵(glcm)能够计算出图像中的纹理结构,从而提供图像中的关于划痕、裂纹、凹陷的纹理信息,将数据分为训练集和验证集。
16、作为本技术文件技术方案的一种可选方案,所述眼镜表面破损检测模型与训练模块,通过建立卷积神经网络(cnn)的眼镜表面破损检测模型,然后利用训练集和验证集,对模型进行训练和调优模型的超参数。
17、作为本技术文件技术方案的一种可选方案,所述破损检测模型应用模块通过使用训练好的模型对新的vr眼镜表面图像进行破损检测,将图像输入到模型中,模型将输出一个二进制分类结果,表示该图像是否有破损。
18、作为本技术文件技术方案的一种可选方案,所述检测装置包括设备座、放置座、vr眼镜主体、转动架、转动机构、清洁机构及夹持机构;
19、设备座内滑动配合设置有放置座;
20、放置座上活动的放置有vr眼镜主体;
21、设备座内壁连接固定设置有固定杆;
22、固定杆上固定设置有转动机构;
23、转动机构上固定设置有转动架;
24、转动架上转动连接设置有清洁机构;
25、设备座内连接固定设置有夹持机构。
26、作为本技术文件技术方案的一种可选方案,所述放置座一端连接固定设置有电动伸缩杆a,电动伸缩杆a另一端与设备座内壁连接固定设置。
27、参作为本技术文件技术方案的一种可选方案,所述转动机构包括电机;
28、固定杆的一端固定设置有固定座,固定座上固定设置有电机;转动架一端与电机的转轴连接固定设置。
29、通过上述技术方案,电机可带动转动架进行转动。
30、作为本技术文件技术方案的一种可选方案,所述清洁机构包括转轴、主动轮、从动轮、传动杆和海绵擦杆;
31、转轴与转动架转动连接设置,转轴外壁连接固定设置有两个主动轮,主动轮一侧啮合传动设置有从动轮,从动轮连接固定设置有传动杆,传动杆与转动架转动连接设置。
32、传动杆外壁滑动配合设置有海绵擦杆;
33、通过上述技术方案,传动杆实现带动海绵擦杆的自转作用。
34、作为本技术文件技术方案的一种可选方案,所述海绵擦杆一端外壁转动连接设置有移动框,移动框与转动架滑动配合设置,移动框与海绵擦杆固定连接。
35、转轴外壁连接固定设置有传动轮a,传动轮a上啮合传动设置有传动轮b,传动轮b上连接固定设置有弯折杆,弯折杆与转动架转动连接设置,弯折杆两端分别与两个移动框内壁滑动配合设置。
36、通过上述技术方案,通过弯折杆的转动实现带动海绵擦杆的上下往复移动作用。
37、作为本技术文件技术方案的一种可选方案,所述设备座内壁安装有多个紫外线消毒灯,设备座内壁安装有多个摄像头,设备座内壁连接固定设置有环形齿条;
38、转轴一端连接固定设置有调节轮,调节轮与环形齿条啮合传动设置。
39、通过上述技术方案,环形齿条实现转轴的自转作用。
40、作为本技术文件技术方案的一种可选方案,所述夹持机构包括电动伸缩杆d、电动伸缩杆b、活动夹和固定夹;
41、设备座内壁连接固定设置有电动伸缩杆d,电动伸缩杆d的活动杆上固定设置有电动伸缩杆b,电动伸缩杆b另一端连接固定设置有固定夹,固定夹另一端滑动配合设置有活动夹,活动夹与固定夹之间连接固定设置有电动伸缩杆c。
42、通过上述技术方案,可通过电动伸缩杆b带动活动夹与固定夹上下移动,通过电动伸缩杆c带动活动夹与固定夹相互靠近或远离,可通过电动伸缩杆d带动活动夹与固定夹横向移动;通过活动夹与固定夹夹起vr眼镜主体进行清理及图像的采集。
43、本发明提供一种施工安全教育用vr眼镜检测系统的使用方法,包括以下步骤:
44、s1、在需要佩戴vr眼镜主体进行施工安全教育时,首先利用电动伸缩杆a带动放置座移出,然后将vr眼镜主体戴在头上进行施工安全教育,使用完毕后再将vr眼镜主体放置到放置座上;通过电动伸缩杆a使放置座收回到设备座内;
45、s2、利用摄像头采集使用后的vr眼镜的表面图像,然后利用眼镜表面图像处理模块包括调整图像大小、标准化像素值,调整图像大小:通过将收集的图像的大小调整为固定的尺寸,这样能够确保有图像具有相同的大小,方便后续处理和模型输入,标准化像素值:接下来,能够使用零均值和单位方差对像素值进行归一化对图像的像素值进行标准化,从而减少图像之间的亮度差异,使得模型更容易学习到有用的特征;
46、s3、通过利用眼镜表面图像数据特征提取模块包括边缘检测、纹理特征提取,边缘检测:边缘是图像中亮度变化的地方,能够提供物体形状和边界的重要信息,通过利用canny边缘检测算法能够将这些算法应用于眼镜表面图像,以检测出图像中的边缘;纹理特征提取:纹理是图像中具有重复、规律性或统计特性的局部结构,通过灰度共生矩阵glcm能够计算出图像中的纹理结构,从而提供图像中的关于划痕、裂纹、凹陷的纹理信息,将数据分为训练集和验证集;
47、s4、然后将训练好的模型对新的vr眼镜表面图像进行破损检测,将图像输入到模型中,模型将输出一个二进制分类结果,表示该图像上是否有破损的位置;
48、s5、根据破损检测结果对vr眼镜主体进行处理;
49、s51、当检测出破损时会进行语音报警,同时对vr眼镜不做进一步的处理,保持原状;并及时找到负责人对vr眼镜主体进行负责修理;
50、s52、当检测到vr眼镜主体无破损时,利用电动伸缩杆b带动固定夹下移,使活动夹和固定夹下降到vr眼镜主体对应位置,然后利用电动伸缩杆c带动活动夹和固定夹对vr眼镜主体进行夹持,通过电动伸缩杆b使vr眼镜主体升起;然后电动伸缩杆d带动活动夹与固定夹横向移动,使vr眼镜主体处于两个海绵擦杆的中间位置上方,通过电动伸缩杆b带动vr眼镜主体下移到两个海绵擦杆的中间位置;然后利用电机带动转动架进行转动,使得两个海绵擦杆可以分别对vr眼镜主体的内外两侧进行清洁处理;同时在环形齿条的作用下,会使得调节轮连接的转轴转动,然后转轴通过主动轮带动从动轮连接的传动杆转动,使得海绵擦杆进行自转擦拭;同时转轴通过传动轮a带动传动轮b连接的弯折杆进行转动,使得弯折杆带动移动框上下移动,从而带动海绵擦杆进行上下移动擦拭,然后配合紫外线消毒灯对vr眼镜主体进行清洁消毒处理。
51、3.有益效果
52、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
53、1.本技术由于采用了vr眼镜表面图像数据收集模块等技术手段,所以有效解决了现有技术中的技术问题,进而实现了在将使用后的vr眼镜放置到设备座内后,利用摄像头对vr眼镜的表面图像进行采集,然后利用模型对图像进行分析处理,对vr眼镜进行破损检测;
54、2.本发明可以对vr眼镜表面的破损情况进行检测,并根据检测结果对vr眼镜进行不同的处理。
55、3.本技术通过设置清洁机构,转动架会带动清洁机构进行周转,从而会带动海绵擦杆对vr眼镜表面进行清洁处理,配合紫外线消毒灯,实现对vr眼镜表面的消毒处理,避免vr眼镜交叉使用时的细菌及病毒的传播,提高装置的实用性。
- 还没有人留言评论。精彩留言会获得点赞!