基于深度学习零参考深度曲线估计算法的低光图像增强及夜间疲劳驾驶检测方法
本发明涉及图像处理领域,具体涉及一种基于深度学习零参考深度曲线估计算法的低光图像增强及夜间疲劳驾驶检测方法。
背景技术:
1、随着车辆在生活中日益普及,交通事故频繁威胁着人们的生命及财产安全。据统计由于疲劳驾驶引发的交通事故占总交通事故的21%,死亡率高达83%。其中,夜间人们更容易出现神经和视觉疲劳,容易导致判断失误、处理不当从而引发交通事故。由于传统的疲劳检测系统存在着外界光线变化而引入大量噪声,造成捕捉图像质量差、特征提取不清晰、识别准确率下降,引起系统判别检测不准确,提醒不及时等问题。使得传统的疲劳驾驶检测系统在夜间检测失去准确性、实时性,从而给夜间驾驶员带来安全隐患。
技术实现思路
1、发明目的:针对现有技术存在的问题,本发明提出一种基于深度学习零参考深度曲线估计算法的低光图像增强及夜间疲劳驾驶检测方法,实现了多模态全方位高精度的疲劳驾驶检测目的。
2、技术方案:一种基于深度学习零参考深度曲线估计算法的低光图像增强及夜间疲劳驾驶检测方法,包括如下步骤:
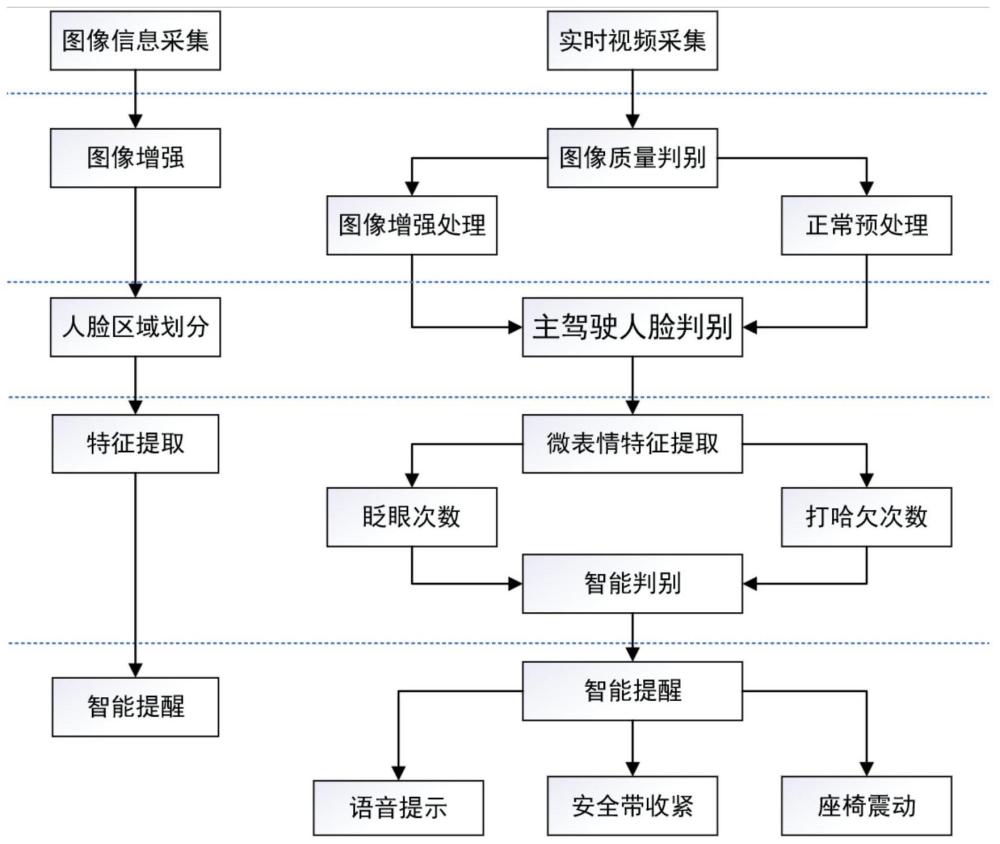
3、(1)实时采集图像;
4、(2)图像质量判别,通过计算并判断图像整体的亮度值,当平均亮度值低于阈值时,通过zero-dce低光图像增强的零参考深度曲线估计算法处理所述图像;
5、采用高阶提亮曲线对输入图像的rgb通道中所有像素进行映射;所述高阶提亮曲线如下:
6、len(x)=len-1(x)+an(x)len-1(x)(1-len-1(x))
7、其中x是像素坐标,an是与给定图像具有相同大小的映射,len(x)是输入len-1(x)图像的增强图像。
8、(3)计算损失函数ltotal:
9、ltotal=wspalspa+wexplexp+wcollcol+wtvaltva
10、其中lspa为空间一致性误差;lexp为曝光控制误差;lcol为颜色恒等误差;ltva为可调节的光照平滑误差;wspa、wexp、wcol、wtva分别为所述空间一致性误差、曝光控制误差、颜色恒等误差和光照平滑误差的权重;
11、通过损失函数计算输入图像在rgb颜色空间上的平均值,并计算该平均值与经过低光增强后的图像在现实中的图像相似度;通过计算红绿、红蓝、绿蓝三个颜色通道的差异,取平方后求和再开方,得到总的颜色差异;
12、(4)计算图像亮度,调整图像曝光度;对图片进行归一化处理,通过所述可调节的光照平滑误差确保增强后的图像没有剧烈的变化;
13、(5)采用低光照数据集对弱光条件下zero-dce低光图像增强的零参考深度曲线估计算法进行训练和评估;所述数据集包括多个图像对,每个图像对都由一个低光输入图像及其相应的曝光良好的参考图像组成。
14、在其中一个实施例中,所述步骤(1)基于计算机视觉库opencv实时采集图像数据。
15、在其中一个实施例中,所述步骤(3)中颜色恒等误差的公式如下:
16、
17、其中(p,q)遍历了rgb三颜色通道的所有两两组合,jp表示颜色通道p的亮度平均值,jq表示颜色通道的q的平均亮度。
18、在其中一个实施例中,所述步骤(3)中曝光控制误差的公式如下:
19、
20、其中e为常数,用于描述rgb颜色空间中像素点亮度的中间值;m为不重叠区域数量,x为增强图像中局部的平均像素强度值。
21、在其中一个实施例中,所述步骤(3)中可调节的光照平滑误差的公式如下:
22、
23、其中n是迭代次数;分别是水平和垂直的梯度算子,在图像中分别是和左方、上方相邻像素之间的数值差;an是一个给定图像相同大小的参数图;t为可调节参数,t∈(1,3]。
24、在其中一个实施例中,所述步骤(3)中对空间一致误差的公式如下:
25、
26、其中k是局部区域的个数;d为卷积核的大小;i,j是对像素的遍历;y为增强后图像局部区域像素的平均强度值,i为输入图像中局部区域像素平均强度值;ω(i)是以i为中心的四个领域。
27、进一步的,本发明还包括人脸识别以及微表情特征检测的步骤;
28、所述人脸识别以及微表情特征检测采用三级联级别网络mtcnn网络结构;结合mtcnn检测器与dlib库中人脸68特征点进行人脸识别检测,以及微表情识别和微表情数据分析;同时融合google mediapipe face mesh作为辅助检测器。
29、此外,本发明还包括疲劳检测的步骤;所述疲劳检测包括眨眼频率检测和/或打哈欠频率检测。优选的,所述眨眼频率检测基于ear算法实现;所述打哈欠频率检测基于mar算法实现。
30、与现有方法相比,本发明具有以下有益效果:
31、1.采用计算机视觉库opencv融合zero-dce(zero-reference deep curveestimation for low-light image enhancement)低光图像增强的零参考深度曲线估计算法,实现了多模态全方位的智能疲劳驾驶检测效果。
32、2.调用计算机视觉库opencv实时感知外界环境光线变化,通过zero-dce低光图像增强的零参考深度曲线估计算法处理,使得图像锐度、色彩饱和度、图像亮度、psnr值及ssim值得到充分增强,提升捕捉图像的质量,填补传统疲劳驾驶检测在夜间等特殊复杂环境下的空白。
33、3.具有感知外界环境光线变化,驾驶员行为检测功能。为夜间驾驶员提供更高的安全性。
34、4.能够与车辆网络通信技术结合,将实时监测结果与其他车辆或交通基础设施共享,以进一步提高整体交通安全性。减少由疲劳驾驶引发的交通事故。
技术特征:
1.一种基于深度学习零参考深度曲线估计算法的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,步骤(1)中,基于计算机视觉库opencv实时采集图像数据。
3.根据权利要求1所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,步骤(3)中,所述颜色恒等误差如下:
4.根据权利要求1所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,步骤(3)中,所述曝光控制误差如下:
5.根据权利要求1所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,步骤(3)中,所述可调节的光照平滑误差如下:
6.根据权利要求1所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,步骤(3)中,所述对空间一致误差如下:
7.根据权利要求1所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,还包括人脸识别以及微表情特征检测的步骤;
8.根据权利要求1所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,还包括疲劳检测的步骤;
9.根据权利要求8所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,所述眨眼频率检测基于ear算法实现。
10.根据权利要求8所述的低光图像增强及夜间疲劳驾驶检测方法,其特征在于,所述打哈欠频率检测基于mar算法实现。
技术总结
本发明公开了一种基于深度学习零参考深度曲线估计算法的低光图像增强及夜间疲劳驾驶检测方法,包括如下步骤:(1)实时采集图像;(2)通过Zero‑DCE低光图像增强的零参考深度曲线估计算法处理图像;(3)通过损失函数计算输入图像在RGB颜色空间上的平均值,并计算该平均值与实现的图像在现实中的图像相似度;通过计算红绿、红蓝、绿蓝三个颜色通道的差异,取平方后求和再开方,得到总的颜色差异;(4)计算图像亮度,调整图像曝光度;对图片进行归一化处理,并提供照明平滑损失确保增强后的图像没有剧烈的变化;(5)采用低光照数据集对弱光条件下图像增强算法进行训练和评估。本发明能够充分增强图像锐度、色彩饱和度、图像亮度、PSNR值及SSIM值。
技术研发人员:陈志文,胡亚鹏,赵雪峰
受保护的技术使用者:江苏海洋大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!