一种液体杂质智能过滤视觉检测方法和装置与流程
本发明涉及视觉检测,具体是一种液体杂质智能过滤视觉检测方法和装置。
背景技术:
1、视觉检测系统现已广泛应用于多种工业生产过程的质检阶段,但绝大多数视觉检测系统都是检测固体以及刚性几何体为主。当检测需要浸泡在液体中的柔性材质时,光学成像系统有很多挑战。例如在隐形眼镜的大规模生产制造和质检过程中,成品检测必须在液体环境下进行。视觉系统拍摄的产品图像通常包括了多种介质:产品,浸泡液体,检测容器等。这么多种介质的各种特征都会呈现在图像中。仅用一张图像将会无法区分,特征是否是在产品本身。很大可能是悬浮在液体中干扰杂质(如小型纤维、灰尘等)或者其他液体干扰(如液体中的气泡等),或者是检测容器上的瑕疵(如脏污、水渍等)。这些都是无需检测的干扰项。但由于无法判断特征位置,传统视觉系统通常都会将产品判为不合格品。但其实产品本身是良品。
2、因此,传统的视觉系统,在处理浸泡在液体内的成品,容易在液体或者容器的干扰下出现误判。
技术实现思路
1、有鉴于此,本发明的目的是提供一种液体杂质智能过滤视觉检测方法和装置,以解决现有技术中在处理浸泡在液体内的成品,容易在液体或者容器的干扰下出现误判的问题。
2、为了实现上述目的,本发明采用了如下技术方案:
3、本发明的一种液体杂质智能过滤视觉检测方法,包括:
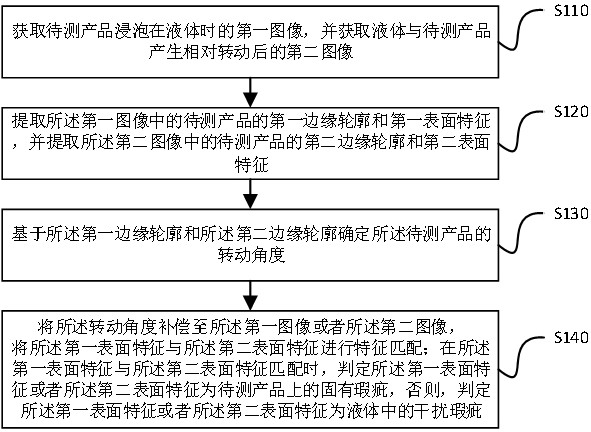
4、获取待测产品浸泡在液体时的第一图像,并获取液体与待测产品产生相对转动后的第二图像,其中,所述液体和所述待测产品均放置于容器中;
5、提取所述第一图像中的待测产品的第一边缘轮廓和第一表面特征,并提取所述第二图像中的待测产品的第二边缘轮廓和第二表面特征;
6、基于所述第一边缘轮廓和所述第二边缘轮廓确定所述待测产品的转动角度;
7、将所述转动角度补偿至所述第一图像或者所述第二图像,以使得所述第一图像中的待测产品和所述第二图像的待测产品的转动角度一致,并在所述第一图像的待测产品和所述第二图像的待测产品转动角度一致时,将所述第一表面特征与所述第二表面特征进行特征匹配;
8、在所述第一表面特征与所述第二表面特征匹配时,判定所述第一表面特征或者所述第二表面特征为待测产品上的固有瑕疵,否则,判定所述第一表面特征或者所述第二表面特征为液体中的干扰瑕疵。
9、在本技术一实施例中,获取液体与待测产品产生相对转动后的第二图像,包括:
10、转动所述容器,以使得液体与待测产品产生相对转动,并在所述容器转动后拍摄所述容器,得到第二图像,或者,使用气源从边缘切线方向吹入所述容器,以使得液体与待测产品产生相对转动,并在所述容器转动后拍摄所述容器,得到第二图像。
11、在本技术一实施例中,提取所述第一图像中的待测产品的第一边缘轮廓,并提取所述第二图像中的待测产品的第二边缘轮廓,包括:
12、对所述第一图像或者所述第二图像进行预处理,得到中间图像;
13、对所述中间图像进行二值化处理,得到轮廓线;
14、对所述轮廓线进行筛选,将满足目标条件的轮廓线作为初步轮廓线,其中,所述目标条件包括:轮廓线直径在预设的直径范围内;轮廓线圆度在预设的圆度范围内;
15、提取所述初步轮廓线的梯度,并基于所述初步轮廓线的梯度确定目标轮廓线,得到第一边缘轮廓或者第二边缘轮廓。
16、在本技术一实施例中,提取所述初步轮廓线的梯度,并基于所述初步轮廓线的梯度确定目标轮廓线;
17、构造多条与所述初步轮廓线其中一条直径平行,且与所述初步轮廓线相交的扫描线;
18、对每一条扫描线的像素点进行一阶求导,得到每一条扫描线的梯度曲线;
19、将每一条梯度曲线中的最大值对应的像素点作为外轮廓点,并将每一条梯度曲线中的最小值对应的像素点作为内轮廓点;
20、基于所有的内轮廓点和外轮廓点构建目标轮廓线。
21、在本技术一实施例中,基于所述第一边缘轮廓和所述第二边缘轮廓确定所述待测产品的转动角度,包括:
22、确定所述第一边缘轮廓与所述第二边缘轮廓的质心;
23、将所述第一边缘轮廓与所述第二边缘轮廓映射至二维坐标系中,得到第一轮廓曲线和第二轮廓曲线,其中,所述第一轮廓曲线的横坐标为所述第一边缘轮廓中多个采样点的相位,所述第一轮廓曲线的纵坐标为所述第一边缘轮廓中多个采样点与所述第一边缘轮廓的质心的距离;所述第二轮廓曲线的横坐标为所述第二边缘轮廓中多个采样点的相位,所述第二轮廓曲线的纵坐标为所述第二边缘轮廓中多个采样点与所述第二边缘轮廓的质心的距离;
24、将所述第一轮廓曲线和所述第二轮廓曲线进行卷积,得到卷积结果曲线;
25、确定所述卷积结果曲线中最大值对应的目标相位,并将所述目标相位转换为所述待测产品的转动角度。
26、在本技术一实施例中,将所述第一轮廓曲线和所述第二轮廓曲线进行卷积,得到卷积结果曲线,包括:
27、对所述第一轮廓曲线和所述第二轮廓曲线执行相乘和相加,得到卷积结果;
28、将所述第一轮廓曲线或者所述第二轮廓曲线移动一个或者多个相位,并回到对所述第一轮廓曲线和所述第二轮廓曲线执行相乘和相加,直至完成对所述第一轮廓曲线和所述第二轮廓曲线的卷积,得到多个卷积结果;
29、基于多个卷积结果构建卷积结果曲线。
30、在本技术一实施例中,对所述第一轮廓曲线和所述第二轮廓曲线执行相乘和相加,得到卷积结果,包括:
31、将所述第一轮廓曲线的每个采样点的纵坐标和所述第二轮廓曲线中相同相位的采样点的纵坐标进行相乘,得到多个乘积,将多个乘积相加,得到卷积结果,其中,纵坐标相同时,乘积为一,纵坐标不同时,乘积为零。
32、在本技术一实施例中,将所述第一表面特征与所述第二表面特征进行特征匹配,包括:
33、提取所述第一表面特征的第一特征向量,并提取所述第二表面特征的第二特征向量;
34、计算所述第一特征向量和所述第二特征向量的余弦相似度;
35、在所述余弦相似度大于或者等于预设阈值时,判定所述第一表面特征与所述第二表面特征匹配,否则,判定所述第一表面特征与所述第二表面特征不匹配。
36、在本技术一实施例中,所述第一特征向量或者所述第二特征向量包括极坐标位置、面积、周长、长宽比、灰度最大值、灰度最小值和灰度平均值。
37、本技术还提供一种液体杂质智能过滤视觉检测装置,包括:
38、获取模块,用于获取待测产品浸泡在液体时的第一图像,并获取液体与待测产品产生相对转动后的第二图像,其中,所述液体和所述待测产品均放置于容器中;
39、特征提取模块,用于提取所述第一图像中的待测产品的第一边缘轮廓和第一表面特征,并提取所述第二图像中的待测产品的第二边缘轮廓和第二表面特征;
40、角度确定模块,用于基于所述第一边缘轮廓和所述第二边缘轮廓确定所述待测产品的转动角度;
41、检测模块,用于将所述转动角度补偿至所述第一图像或者所述第二图像,以使得所述第一图像中的待测产品和所述第二图像的待测产品的转动角度一致,并在所述第一图像的待测产品和所述第二图像的待测产品转动角度一致时,将所述第一表面特征与所述第二表面特征进行特征匹配;在所述第一表面特征与所述第二表面特征匹配时,判定所述第一表面特征
42、或者所述第二表面特征为待测产品上的固有瑕疵,否则,判定所述第一表面特征或者所述第二表面特征为液体中的干扰瑕疵。
43、本发明的有益效果是:本发明的一种液体杂质智能过滤视觉检测方法和装置,分别获取待测产品与液体产生相对转动之前的第一图像,和产生相对转动后的第二图像,然后分别提取第一图像中的第一边缘轮廓和第一表面特征,提取第二图像中的第二边缘轮廓和第二表面特征;通过第一边缘轮廓和第二边缘轮廓来确定两张图片中的待测产品转动角度。由于液体和待测产品在相对转动时,待测产品上的固有瑕疵也会随待测产品转动,因此再将转动角度补偿至第一图像或者第二图像后,对第一表面特征和第二表面特征进行匹配,如果匹配则说明第一表面特征和第二表面特征随待测产品转动,为待测产品上的瑕疵,如果不是,则说明为液体中悬浮杂质。本技术可以有效排除液体悬浮物的干扰,使得待测产品的检测结果更加准确。
- 还没有人留言评论。精彩留言会获得点赞!