多船协同的海上风电运维调度高效优化方法及相关装置
本技术属于运维调度优化方法,具体涉及一种多船协同的海上风电运维调度高效优化方法及相关装置。
背景技术:
1、海上风电场维修调度及路径规划是海上风电智能运维的核心场景,实际应用中,需要根据调度及路径规划结果执行运维任务。船员旅行船(crew travel vessel,ctv)用于在运维基地和风电场之间执行输送技术人员和物资,由于相较其他类型的船舶成本较低,被广泛应用。但是,ctv不能在海上过夜,且只能携带重量不大的维修工具和备品备件,一旦维护活动完成,需要在同一天返回运维基地。由于运维基地和风电场之间的距离相对较远,一艘船通常一天只进行一次往返。由于sov造价高昂,目前绝大部分的海上风电日常运维任务一般由ctv执行。海上风电场维修节点数量众多,而单艘ctv运维船能够承载的任务量有限,因此,在工程实际中,通常采用多艘ctv运维船协同作业的方式,加快运维任务的执行效率,以应对转瞬即逝的运维时间窗口。
2、海上风电运维调度模型通常为milp(mixed integer linear programming,混合整数线性规划)问题。现有的海上风电运维调度模型求解方法主要有三种:穷举法、分支定界法和启发式方法。由于milp问题的求解计算量随着问题规模扩大呈指数级增长,因此,穷举法只适用于非常小规模的运维调度模型的求解,难以适应海上风电场集群多船协同作业的需求。商业求解器通常基于分支定界法,相比穷举法的求解效率提升了很多,且能够得到原问题的精确解,然而,在问题规模较大且求解时间受限的情况下,分支定解法依然难以返回令人满意的解,而只有较长的求解时间才能得到较好的可行解。作为一种折中,采用启发式方法求解问题的近似解。但即便如此,实现一次优化仍然费时费力。如,以gurobi商业求解器为代表的精确求解技术求解一次多船协同优化需要花费的时间高达几十个小时,而以大领域算法(lns)为代表的元启发式方法求解一次仍然需要花费从几十分钟到数个小时不等的时间。而且一旦外部条件发生变动,就不得不重新执行如此费时费力的优化过程。
技术实现思路
1、本技术的目的在于解决现有技术中的问题,提供一种多船协同的海上风电运维调度高效优化方法及相关装置。
2、为了实现上述目的,本技术采用以下技术方案予以实现:
3、第一方面,本技术提出一种多船协同的海上风电运维调度高效优化方法,包括:
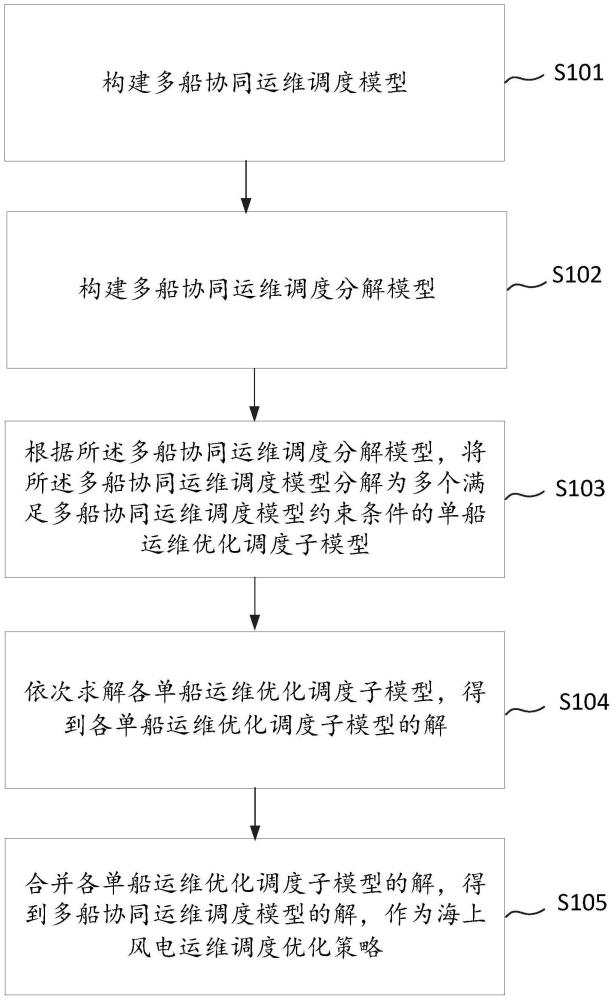
4、构建多船协同运维调度模型;
5、构建多船协同运维调度分解模型;
6、根据所述多船协同运维调度分解模型,将所述多船协同运维调度模型分解为多个满足运维调度模型约束条件的单船运维优化调度子模型;
7、依次求解各单船运维优化调度子模型,得到各单船运维优化调度子模型的解;
8、合并各单船运维优化调度子模型的解,得到多船协同运维调度模型的解,作为海上风电运维调度优化策略。
9、优选地,所述多船协同运维调度分解模型的目标函数,包括:
10、
11、其中,i表示需要维修的机组集合,v表示船舶集合,xiv=1或者xiv=0,xiv=1表示待维修机组i被船舶v维修,xiv=0表示待维修机组i未被船舶v维修,xjv=1或者xjv=0,xjv=1表示待维修机组j被船舶v维修,xjv=0表示待维修机组j未被船舶v维修,dmax=maxi,j∈idij,表示待维修机组之间的最大距离;i(·)为示性函数,当xiv=xjv成立时,i(xiv=xjv)=1,否则,i(xiv=xjv)=0;dij表示维修节点i到维修节点j的距离。
12、优选地,所述多船协同运维调度分解模型的约束条件,包括:
13、维修任务分配唯一性约束条件:
14、
15、最低机组任务约束:
16、
17、船舶载人量限制约束:
18、
19、其中,ρip表示待维修机组i所需要的类型为p的技术人员数量,表示船舶v所能搭载的最大人数;
20、运维船载重量约束:
21、
22、其中,wi表示待维修机组i所需的备件和维修设备重量,表示船舶v所能搭载的最大备件重量;
23、船舶机组匹配约束:
24、
25、其中,iv表示能够被船舶v维修的机组集合;
26、变量整数约束:
27、
28、优选地,所述根据所述多船协同运维调度分解模型,将所述多船协同运维调度模型分解为多个满足多船协同运维调度模型约束条件的单船运维优化调度子模型,包括:
29、采用cp-sat求解器通过约束规划方法求解分解模型,根据分解模型的解,将多船协同运维调度模型分解成多个单船运维优化调度子模型,且多个单船运维优化调度子模型均满足多船协同运维调度模型的约束条件。
30、优选地,所述各单船运维优化调度子模型的解,包括:单船的路径规划和运维任务排程。
31、优选地,所述合并各单船运维优化调度子模型的解,之前还包括冲突检查:
32、检查各单船运维优化调度子模型的解中,运维任务分配是否重叠、运维时间是否冲突,完成运维任务的时间是否在给定的时间窗口内,若均满足要求,则合并各单船运维优化调度子模型的解,否则,重新分解所述多船协同运维调度模型。
33、第二方面,本技术提出一种多船协同的海上风电运维调度高效优化系统,包括:
34、第一构建模块,用于构建多船协同运维调度模型;
35、第二构建模块,用于构建多船协同运维调度分解模型;
36、分解模块,用于根据所述多船协同运维调度分解模型,将所述多船协同运维调度模型分解为多个满足多船协同运维调度模型约束条件的单船运维优化调度子模型;
37、求解模块,用于依次求解各单船运维优化调度子模型,得到各单船运维优化调度子模型的解;
38、合并模块,用于合并各单船运维优化调度子模型的解,得到多船协同运维调度模型的解,作为海上风电运维调度优化策略。
39、优选地,还包括检查模块;
40、所述各单船运维优化调度子模型的解包括:单船的路径规划和运维任务排程;
41、所述检查模块,用于在合并模块合并各单船运维优化调度子模型的解之前,检查各单船运维优化调度子模型的解中,运维任务分配是否重叠、运维时间是否冲突,完成运维任务的时间是否在给定的时间窗口内,若均满足要求,则合并各单船运维优化调度子模型的解,否则,重新分解所述多船协同运维调度模型。
42、第三方面,本技术提出一种电子设备,包括:
43、存储器,用于存储计算机程序;
44、处理器,用于执行所述计算机程序时实现上述多船协同的海上风电运维调度高效优化方法的步骤。
45、第四方面,本技术提出一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现上述多船协同的海上风电运维调度高效优化方法的步骤。
46、与现有技术相比,本技术具有以下有益效果:
47、本技术提出一种多船协同的海上风电运维调度高效优化方法,将构建的多船协同运维调度模型分解为多个满足多船协同运维调度模型约束条件的单船运维优化调度子模型,分别求解后,合并各单船运维优化调度子模型的解,得到多船协同运维调度模型的解,作为海上风电运维调度优化策略。实现了海上风电场多船协同优化调度模型的高效求解,帮助风电运营商和第三方运维服务商提高运维任务的排布效率,减少风险,降低运维成本。即使面对大规模的多船协同运维调度模型,也能够快速完成求解,得到优化策略,效率高且计算准确度高。
48、本技术还提出了一种多船协同的海上风电运维调度高效优化系统、电子设备和计算机可读存储介质,能够通过不同的硬件形式实现上述多船协同的海上风电运维调度高效优化方法,具有广泛的推广价值,具备上述多船协同的海上风电运维调度高效优化方法的全部优势。
- 还没有人留言评论。精彩留言会获得点赞!