一种基于子集划分的点云语义分割方法、终端设备及介质
本发明涉及点云语义分割领域,尤其涉及一种基于子集划分的点云语义分割方法、终端设备及介质。
背景技术:
1、点云语义分割是自动驾驶、机器人和增强现实等许多应用中的一项关键任务。现有的点云语义分割具有以下缺陷:首先,处理和分类高维空间数据时缺乏有效的特征提取方法,导致无法充分利用点云数据中蕴含的丰富几何信息。其次,现有技术很难适应点云数据的密度不均和噪声,这些因素通常会导致分类精度降低。此外,传统分割算法通常依赖于固定的阈值和参数,缺乏必要的灵活性来应对多变的场景。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于子集划分的点云语义分割方法、终端设备及介质。
2、具体方案如下:
3、一种基于子集划分的点云语义分割方法,包括以下步骤:
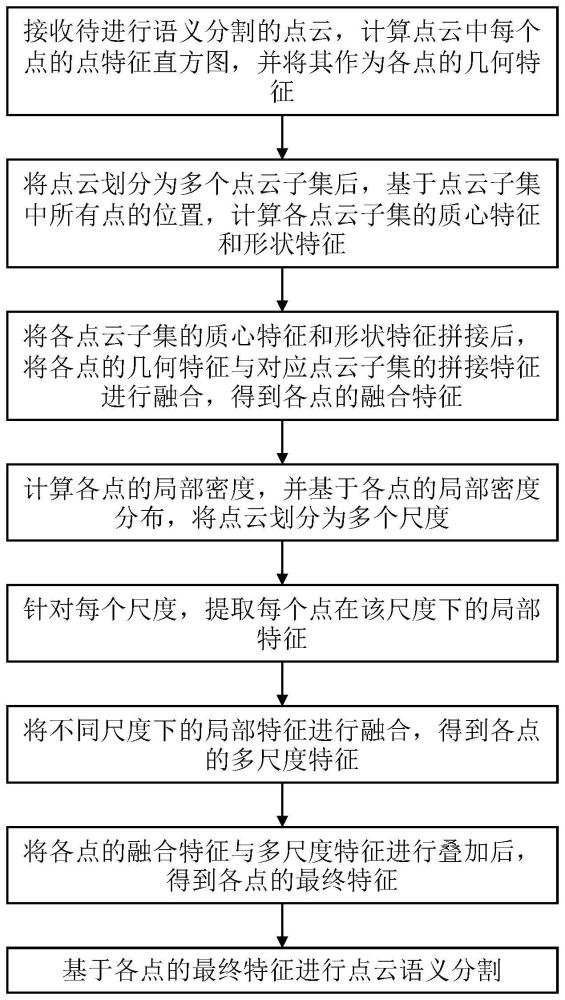
4、s1:接收待进行语义分割的点云,计算点云中每个点的点特征直方图,并将其作为各点的几何特征;
5、s2:将点云划分为多个点云子集后,基于点云子集中所有点的位置,计算各点云子集的质心特征和形状特征;
6、s3:将各点云子集的质心特征和形状特征拼接后,将各点的几何特征与对应点云子集的拼接特征进行融合,得到各点的融合特征;
7、s4:计算各点的局部密度,并基于各点的局部密度分布,将点云划分为多个尺度;
8、s5:针对每个尺度,提取每个点在该尺度下的局部特征;
9、s6:将不同尺度下的局部特征进行融合,得到各点的多尺度特征;
10、s7:将各点的融合特征与多尺度特征进行叠加后,得到各点的最终特征;
11、s8:基于各点的最终特征进行点云语义分割。
12、进一步的,点云子集的划分中,基于两点之间的特征相似度和空间接近性进行综合考量;两点之间的空间接近性采用高斯核函数进行计算。
13、进一步的,点云子集的质心特征的计算公式为:
14、
15、其中,centroid_features(s)表示点云子集s的质心特征,pi表示点云子集s中的点,|s|表示点云子集s中点的数量。
16、进一步的,步骤s2的点云子集的形状特征的计算过程包括以下步骤:
17、s201:针对点云子集s中的任意一点pi,计算点pi与其所有邻点的协方差矩阵;
18、s202:对协方差矩阵进行特征分解,得到特征值和特征向量;
19、s203:提取其中的最小特征值和第二小特征值,基于最小特征值对应的特征向量确定点pi的局部表面法线,设定点pi的切平面为垂直于局部表面法线的平面,基于第二小特征值对应的特征向量确定点pi的切平面的主方向;
20、s204:计算点pi与其邻点pj的欧氏距离、第一角度θij和第二角度φij;
21、点pi与其邻点pj的第一角度θij为邻点pj相对于点pi的局部表面法线的角度;
22、点pi与其邻点pj的第二角度φij为向量pj-pi在点pi的切平面上的投影与点pi的切平面的主方向的角度;
23、s205:基于点云子集中各点与其各邻点的欧氏距离、第一角度和第二角度的直方图,串联得到点云子集的形状直方图,将点云子集的形状直方图作为点云子集的形状特征。
24、进一步的,点的局部密度的计算公式为:
25、
26、其中,ρ(pi)表示点pi的局部密度,k表示点pi的邻点的数量,pj表示点pi的邻点,nk(pi)表示点pi的邻近点集,dij表示点pi与其邻点pj之间的欧氏距离,∈表示用于防止除数为零的数。
27、进一步的,还包括对所有点的局部密度进行归一化处理。
28、进一步的,点的融合特征的计算公式为:
29、
30、其中,ffeedback(pi)表示点pi的融合特征,λ表示用于调节几何特征与点云子集拼接特征重要性占比的权重系数,dloc(pi)表示点pi的几何特征,表示点pi所属的点云子集的拼接特征。
31、进一步的,点的多尺度特征的计算公式为:
32、
33、其中,v(pi)表示点pi的多尺度特征,l表示尺度集,表示尺度的特征在融合过程中所占的权重系数,表示尺度下点pi的局部特征。
34、一种基于子集划分的点云语义分割终端设备,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明实施例上述的方法的步骤。
35、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例上述的方法的步骤。
36、本发明采用如上技术方案,系统地提取了局部与全局结构信息,从而提高了对细微结构的识别能力。此外,基于密度的多尺度特征捕获技术,确保在不同尺度上都能捕捉到关键特征,增强了语义分割的鲁棒性。
技术特征:
1.一种基于子集划分的点云语义分割方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于子集划分的点云语义分割方法,其特征在于:点云子集的划分中,基于两点之间的特征相似度和空间接近性进行综合考量;两点之间的空间接近性采用高斯核函数进行计算。
3.根据权利要求1所述的基于子集划分的点云语义分割方法,其特征在于:点云子集的质心特征的计算公式为:
4.根据权利要求1所述的基于子集划分的点云语义分割方法,其特征在于:步骤s2的点云子集的形状特征的计算过程包括以下步骤:
5.根据权利要求1所述的基于子集划分的点云语义分割方法,其特征在于:点的局部密度的计算公式为:
6.根据权利要求1所述的基于子集划分的点云语义分割方法,其特征在于:还包括对所有点的局部密度进行归一化处理。
7.根据权利要求1所述的基于子集划分的点云语义分割方法,其特征在于:点的融合特征的计算公式为:
8.根据权利要求1所述的基于子集划分的点云语义分割方法,其特征在于:点的多尺度特征的计算公式为:
9.一种基于子集划分的点云语义分割终端设备,其特征在于:包括处理器、存储器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1~8中任一所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1~8中任一所述方法的步骤。
技术总结
本发明涉及一种基于子集划分的点云语义分割方法、终端设备及介质,该方法中包括:将点云中每个点的点特征直方图作为其几何特征;将点云划分为多个点云子集后,计算各点云子集的质心特征和形状特征;将各点云子集的质心特征和形状特征拼接后,将各点的几何特征与对应点云子集的拼接特征融合为融合特征;基于各点的局部密度分布,将点云划分为多个尺度;提取每个点在各尺度下的局部特征;将不同尺度下的局部特征进行融合,得到各点的多尺度特征;将各点的融合特征与多尺度特征进行叠加后,得到各点的最终特征;基于最终特征进行点云语义分割。本发明系统地提取了局部与全局结构信息,从而提高了对细微结构的识别能力。
技术研发人员:王宗跃,苏锦河,蔡国榕,任昱衡,郭伟鹏
受保护的技术使用者:集美大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!