基于激光雷达三维点云数据的煤矿钻孔缺陷检测判定方法与流程
本发明属于煤矿钻孔变形监测和裂缝分割识别,涉及一种基于激光雷达三维点云数据的煤矿钻孔缺陷检测判定方法。
背景技术:
1、对于煤矿钻孔缺陷的检测,现有技术主要是通过人眼或图像识别来判断煤矿钻孔是否变形,裂缝主要通过图像数据来识别分割,如果钻孔成像与标准图像有区别或者图像中有变形特征,具有裂缝的图像特性,第一时间来进行预警与分割。上述主要靠人工或者图像识别的方式对煤矿钻孔缺陷进行检测和判断,人工方式主观性较强,造成人为因素影响,图像识别的方式容易受到孔内光照和煤矿矿孔变形后相机成像曲焦的影响,导致钻孔变形检测误差。煤矿钻孔内部缺陷,目前通过图像和人工来检测,受外界因素影响,裂缝不能有效监测出来,进而影响煤矿钻孔质量检测。
技术实现思路
1、针对现有技术中存在的不足,本发明的目的在于,提供一种基于激光雷达三维点云数据的煤矿钻孔缺陷检测判定方法,解决现有技术中煤矿钻孔变形监测和裂缝分割识别存在检测误差,影响煤矿钻孔质量检测等问题。
2、为了解决上述技术问题,本发明采用如下技术方案予以实现:
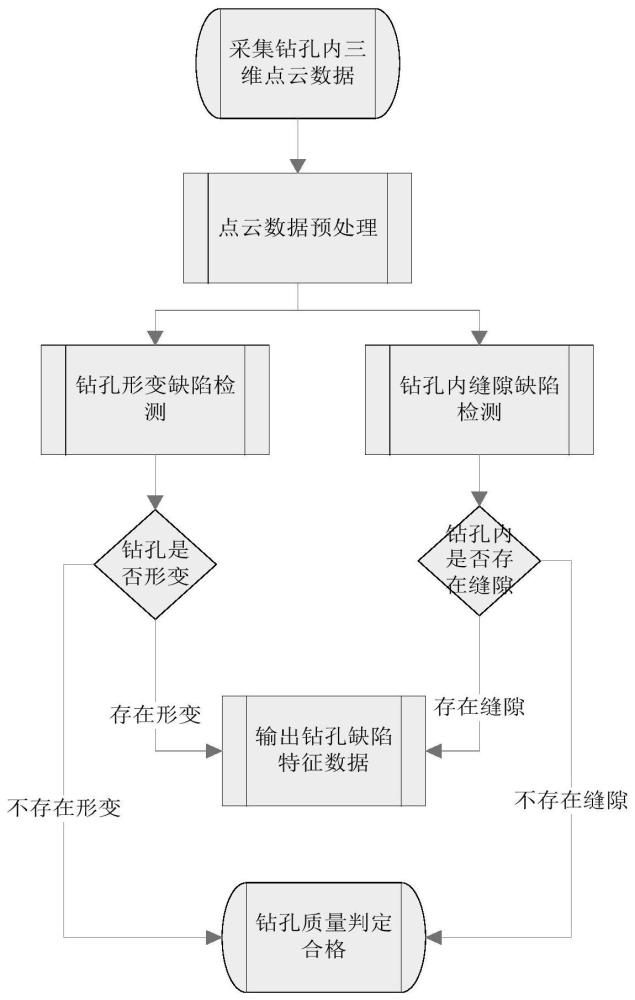
3、基于激光雷达三维点云数据的煤矿钻孔缺陷检测判定方法,该方法能对钻孔变形缺陷和钻孔内裂缝缺陷进行检测判定;
4、所述钻孔变形缺陷采用钻孔孔圆度k和钻孔孔径变形量β进行检测判定,钻孔孔圆度k的计算方式如下公式:
5、
6、上式中,k为钻孔孔圆度,r为激光雷达采集煤矿钻孔三维点云集中某一截面圆的半径,截面圆点云集为(xi,yi,zi),i=1,2,3,…,n,截面圆圆心坐标为(a,b,c),di为该截面圆点云集上第i个点到截面圆圆心的距离,n为该截面圆点云集上点的个数;钻孔孔圆度k值小于阈值0.05,则判定钻孔未变形,钻孔孔圆度k值大于阈值0.05,则判定钻孔变形;钻孔孔径变形量β的计算公式:其中,r’为已知煤矿钻孔的标准半径;
7、所述钻孔内裂缝缺陷采用钻孔裂缝点云集sα进行判定,若钻孔裂缝点云集sα为非空,则钻孔存在裂缝缺陷。
8、本发明还包括如下技术特征:
9、具体的,所述钻孔裂缝点云集sα获取过程包括以下步骤:
10、步骤1,设q为截面圆点云集的点,d((a,b,c),q)为点q到截面圆圆心(a,b,c)的距离,则分割出截面圆圆外数据点集s:
11、s={q|d((a,b,c),q)>r,q∈s} (11)
12、步骤2,从分割出的截面圆圆外数据点集s中获取钻孔裂缝点云集si:
13、si={q|d((pi,q)<r,q∈s} (12)
14、上式中,pi为初始点,r为阈值;
15、步骤3,计算钻孔裂缝点云集si的点云密度:
16、
17、上式中,d(pj,q)为pj点和q点之间的距离,点pj为钻孔裂缝点云集si内的点,t为钻孔裂缝点云集si内点的个数;
18、步骤4,当钻孔裂缝点云集si的点云密度d大于等于阈值γ,判断钻孔裂缝点云集si为钻孔裂缝数据,当钻孔裂缝点云集si的点云密度d小于阈值γ,判断钻孔裂缝点云集si为非钻孔裂缝数据;对圆外数据点集s完成邻域迭代并进行点云密度计算判别后,将判断的钻孔裂缝数据归并到钻孔裂缝点云集sα。
19、具体的,所述截面圆的半径r和截面圆圆心坐标(a,b,c)的获取过程包括以下步骤:
20、步骤a1,截面圆的方程为r2=(x-a)2+(y-b)2+(z-c)2(1);
21、设a=-2a,b=-2b,c=-2c,d=a2+b2+c2-r2,则圆的曲线方程为:
22、x2+y2+z2+ax+by+cz+d=0,a、b、c、r计算公式如下:
23、
24、
25、
26、
27、步骤a2,计算该截面圆点云集上第i个点到截面圆圆心的距离di的公式为:
28、
29、步骤a3,计算截面圆点云集上第i个点到截面圆圆心的距离di与半径的误差:
30、
31、并计算出截面圆点云集所有点误差和:
32、步骤a4,对所有误差和计算极值点,q(a,b,c,d)的每一项都大于等于0,所以函数存在大于或等于零的极小值,极大值为正无穷大,q(a,b,c,d)分别对参数a,b,c,d求偏导,令偏导数为0,即求出极值点;
33、
34、
35、
36、
37、根据公式(5)、公式(6)、公式(7)、公式(8)求出a,b,c,d值,将a,b,c,d值代入公式(2)中得到圆心(a,b,c),半径r的值,从而得到距离di的值。
38、本发明与现有技术相比,具有如下技术效果:
39、本发明能对煤矿钻孔进行高精度三维扫描,获取煤矿钻孔的真三维点云数据,通过算法能分辨出煤矿钻孔上的变形缺陷特征。激光雷达由于采用主动式三维建模方式,可以无视白天黑夜,24小时都能正常工作,全天候采集数据,能够实时有效的对煤矿钻孔进行变形缺陷检测。对钻孔采用激光雷达进行主动式三维建模后,在变形缺陷检测的基础上,能够实时完成裂缝缺陷的识别与分割。能提高煤矿钻孔的安全检测质量,钻孔变形和裂缝缺陷能在第一时间就能得到相关的数据,而且是自动计算出来的,利于后续的统计分析。采用基于激光雷达三维点云的模式识别的方式替换人眼或图像识别技术分辨,节省人力。全天候都可以进行高质量的安全检测,能够提高煤矿钻孔缺陷检测的效果。该算法的提出能够对煤矿安全三维化监测体系产生较好的影响。
技术特征:
1.基于激光雷达三维点云数据的煤矿钻孔缺陷检测判定方法,其特征在于,该方法能对钻孔变形缺陷和钻孔内裂缝缺陷进行检测判定;
2.如权利要求1所述的基于激光雷达三维点云数据的煤矿钻孔缺陷检测判定方法,其特征在于,所述钻孔裂缝点云集sα获取过程包括以下步骤:
3.如权利要求2所述的基于激光雷达三维点云数据的煤矿钻孔缺陷检测判定方法,其特征在于,所述截面圆的半径r和截面圆圆心坐标(a,b,c)的获取过程包括以下步骤:
技术总结
本发明公开了一种基于激光雷达三维点云数据的煤矿钻孔缺陷检测判定方法,该方法对高精度激光雷达扫描煤矿钻孔后产生的三维点云数据进行处理分析,从而能对钻孔变形缺陷和钻孔内裂缝缺陷进行检测判定。本发明能实时监测煤矿钻孔的变形和裂缝分割,针对监测结果作出相应的措施,提高煤矿巷道掘进和回采工作面两巷冲击的安全性。
技术研发人员:刘耀波,蔺兑波,路前海,樊依林,代晨昱,马允俨,崔万豪,王小宇
受保护的技术使用者:中煤科工西安研究院(集团)有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!