数字三维逆向构建场景方法及集输站场智能孪生系统与流程
本发明涉及三维模型构建,尤其涉及一种数字三维逆向构建场景方法及集输站场智能孪生系统。
背景技术:
1、目前的建筑平面图识别方法可以分为传统方法和基于深度学习的方法。传统方法一般基于图像的底层特征和一些预定义的几何规则。传统方法一般只能适用于预定义符号形状的数据,并不能迁移到其他类型的数据。基于深度学习的方法,一般是将角点检测、语义分割、目标检测等方法应用于建筑平面图识别问题。
2、由于传统的基于图像几何特征的识别方法只能适用于预定义符号形状的数据,要求设计师在绘图时遵循一定的绘制规范。首先从基于深度学习的语义分割技术这一方向进行技术预研,通过从搜索引擎搜集100张建筑平面图纸,对这些图纸上的物体如墙、门、窗等物体进行人工标记,将标记之后的数据集作为语义分割算法的样本数据集,经过测试,训练之后的算法模型基本能够识别相同类型图纸上的物体。
3、语义分割技术需要人工标记的图纸样本用于训练,输入的样本数量越多,识别成功率越高。油田行业的图纸与建筑平面图绘制有所不同,其中的加热炉、泵、管线等物体在普通的建筑平面图上没有相同的元素,网络收集的建筑平面图不能作为油田图纸识别的样本输入。
技术实现思路
1、本发明的目的在于针对现有技术的不足之处,提供一种数字三维逆向构建场景方法及集输站场智能孪生系统,以解决老旧油田站场中建筑施工、工艺流程和设备布局图纸的不完整的问题。
2、第一方面,本发明提供一种数字三维逆向构建场景方法,包括:
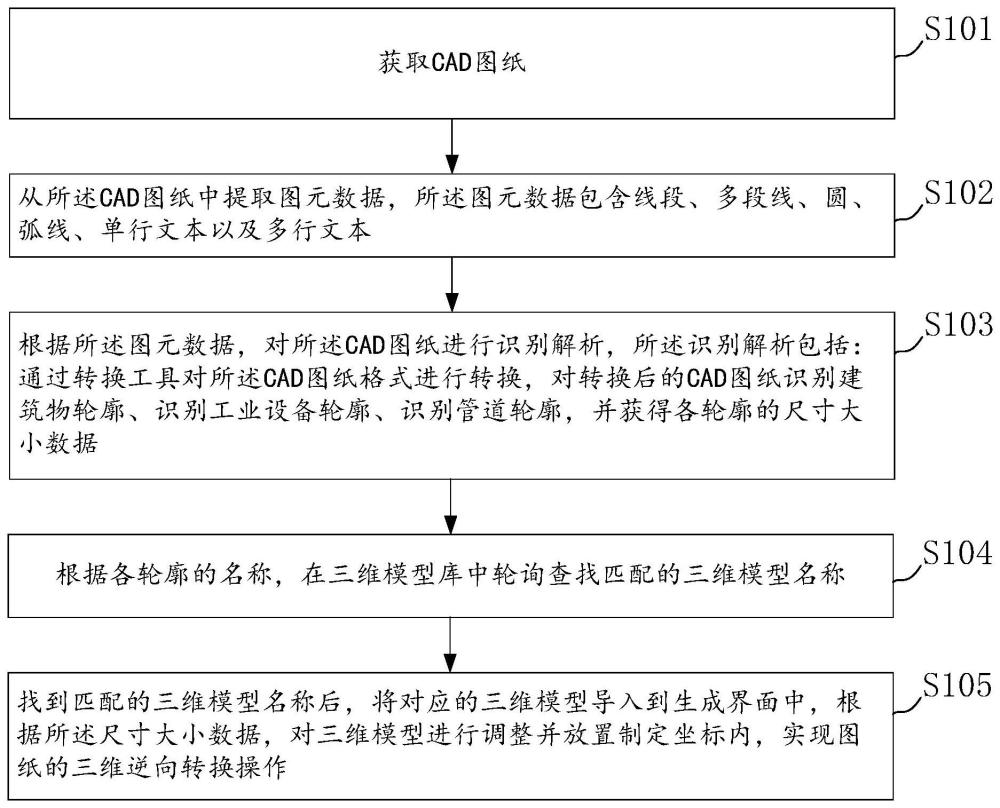
3、获取cad图纸;
4、从所述cad图纸中提取图元数据,所述图元数据包含线段、多段线、圆、弧线、单行文本以及多行文本;
5、根据所述图元数据,对所述cad图纸进行识别解析,所述识别解析包括:通过转换工具对所述cad图纸格式进行转换,对转换后的cad图纸识别建筑物轮廓、识别工业设备轮廓、识别管道轮廓,并获得各轮廓的尺寸大小数据;
6、根据各轮廓的名称,在三维模型库中轮询查找匹配的三维模型名称;
7、找到匹配的三维模型名称后,将对应的三维模型导入到生成界面中,根据所述尺寸大小数据,对三维模型进行调整并放置指定坐标内,实现图纸的三维逆向转换操作。
8、进一步地,从所述cad图纸中提取图元数据,包括:
9、计算点集的凸包、求点到线段的垂直距离、求点是否在多边形内、求点是否在线上、构造点集的包围盒、构造线段的射线、求两射线是否平行、求圆弧与射线的交点、取向量的模长、向量归一化、求两向量的点乘、求两向量的叉乘、求两向量的距离。
10、进一步地,计算点集的凸包,包括:给定一组平面上的点,将最外层的点连接起来构成凸多边形,通过凸包的形状,判断一组相连接的线段是否构成房间的形状;
11、求点到线段的垂直距离包括:给定一个点和一条线段,经过点作线段的垂线,垂线的长度是点到线段的垂直距离,垂直距离用于判断建筑物名称文本是否标记在某建筑物附近,以及两条平行线之间的距离是否符合一个门的宽度;
12、求点是否在多边形内包括:判断一个点是否在多边形的内部,用于获取建筑物内部标注的名称以及泵的编号;
13、求点是否在线上包括:对于任意一个点和一条射线,判断该点是否在线上,用于计算两条线段是否是延伸线,以及某线段是否延伸穿过某文本。
14、进一步地,构造点集的包围盒包括:给定一组平面上的点,求解包含这组点的最小矩形,用于计算图幅的宽高、最大和最小点的坐标;
15、构造线段的射线包括:两点相连构成一条线段,线段往两端无限延伸构成射线,通过构造线段的射线,判断某个点是否在这条线的延伸线上;
16、求两射线是否平行包括:给定两条射线,求两条射线是否相互平行,在平面上没有交点,用于判断门的形状、加热炉的边线;
17、求圆弧与射线的交点包括:给定一个圆弧和一条射线,求圆弧与射线的交叉点,交点的个数为0-2个,用于判断线段是否是加热炉的边;
18、进一步地,取向量的模长包括:向量是具有大小和方向的量,模长是向量的长度;
19、向量归一化包括:归一化的向量是单位向量,将向量归一化,用于计算两个向量的方向是否相同。
20、进一步地,求两向量的点乘包括:向量的点乘为内积/数量积,对两个向量执行点乘运算,是对这两个向量对应位相乘之后求和的操作,两个向量a与b的内积为a·b=|a||b|cos∠(a,b),通过向量的点乘公式,求得两条向量/线段之间的夹角;
21、求两向量的叉乘包括:向量的叉乘称为外积/向量积,向量a与b的外积a×b是一个向量,其长度等于|a×b|=|a||b|sin∠(a,b),其方向正交于a与b,向量a和向量b的外积结果是一个向量,该向量垂直于a和b向量构成的平面,通过向量的叉乘公式,求得两向量之间的法向量的方向;
22、求两向量的距离包括:给定两个向量,求这两个向量在空间中的点的距离。
23、进一步地,识别建筑物轮廓,包括:
24、遍历图纸中的线段,沿着线段首尾随机任一方向计算相连的线段;
25、计算相连两向量的点乘,根据公式a*b=|a|*|b|*cos<a,b>,求得两向量的夹角,用于判断相连两条线段之间的夹角是否为90度;
26、计算相连两向量的叉乘,然后将叉乘结果的法向量归一化,得到相连向量的时钟顺序cross;
27、求得相连线段后,继续求该线段的相连线段及点叉乘,要求叉乘的法向量的时钟顺序与上一次求得的顺序相同;
28、当没有连接线段时,求线段的平行线段,计算平行线的长度是否相等,计算平行线之间的距离,从而根据设定的阈值判断是否满足条件;
29、求得平行线段之后,继续沿相同的时钟顺序cross计算连接线;
30、求得所有的线段后,计算线段的数量是否满足4+3*x;
31、计算线段顶点的凸包,返回凸包的顶点的点集;
32、计算凸包点集组成的线段是否构成矩形;
33、计算位于多边形内部的建筑物文字,得到建筑物的名称。
34、进一步地,识别工业设备轮廓,包括:
35、遍历所有圆弧,求同心圆弧;
36、遍历所有线段,构造线段的射线;
37、求圆弧所在同心圆与射线的交点;
38、如果交点的个数为1,则为切线;如果个数为2,则计算圆心到交点的距离与圆半径的关系,如果小于设定阈值,则满足要求;
39、计算每个同心圆有几条平行切射线或近似相切;
40、如果有两个同心圆各有2条切射线,且切射线相同,则判断为炉型设备;
41、计算位于多边形内部的设备文字,得到设备的名称。
42、进一步地,识别管道轮廓,包括:
43、从图纸中查找到图例文本;
44、通过阈值设定,在图例的附近查找线段颜色及类型名称;
45、遍历图纸中的线段,如果线段的颜色与图例中的任一管线颜色相同,则依次从线段的起点方向查找相互连接且颜色相同的线,以及从线段的终点方向查找相互连接且颜色相同的线;
46、当任意方向没有相互连接的线时,查找平行线段,确定该平行线段是否是延伸线,计算延伸线的距离是否满足设定的阈值;
47、当满足上述判定时,认为该线段是管道的断开点;
48、通过上述计算,分类提取到图纸中的各类管线,并将管线交叉处的断开位置补齐。
49、第二方面,本发明提供一种集输站场智能孪生系统,部署有数字三维逆向构建模块,所述数字三维逆向构建模块用于实现以上所述的数字三维逆向构建场景方法。
50、本发明的有益效果如下:本发明的数字三维逆向构建场景方法及集输站场智能孪生系统,实现了将cad图纸进行数字三维逆向构建场景的技术实现,在大批量智慧站场或数字城市建模和仿真的时候,能够有效节省人力资源,加快建模的速度。相较于深度学习技术在没有大量数据样本支撑的时候也能识别结果,耗费设备资源少、识别准确率高。
- 还没有人留言评论。精彩留言会获得点赞!