一种基于星体光相干性的随机数生成方法、装置及设备与流程
本技术涉及信息安全,尤其涉及一种基于星体光相干性的随机数生成方法、装置及设备。
背景技术:
1、基于随机数的不可预测性、不可重复性和统计无偏性,随机数被广泛应用于仿真、数据加密和统计抽样等领域中。目前的随机数分为两种:伪随机数和真随机数。其中,伪随机数是依赖特定的数学算法生成的,因此,在当前计算能力不断增强的情况下,伪随机数存在被攻破的可能,伪随机数的安全性无法得到保证。而真随机数是基于不可预测的物理系统的随机性生成的,相较于伪随机数而言,真随机数具有真正的不可预测性。因此,获取真随机数以及利用真随机数作为密钥源已成为当前发展趋势。
2、目前,相关研究中已采用各种特殊光源用于提取真随机数,其中,太阳作为最容易获得的光源之一,太阳也被应用于生成真随机数。当前利用太阳光生成随机数的方式为:探测太阳光的光强,将光强转换为频率或偏振等方面的信息,根据频率信息或偏振信息生成随机数。在这种随机数生成方式下,光强转换为频率信息或偏振信息的过程需要众多设备实现,并且还需要复杂的准备程序才可完成,使得随机数生成效率较低。
技术实现思路
1、本技术提供一种基于星体光相干性的随机数生成方法、装置及设备,用于提高随机数生成效率。
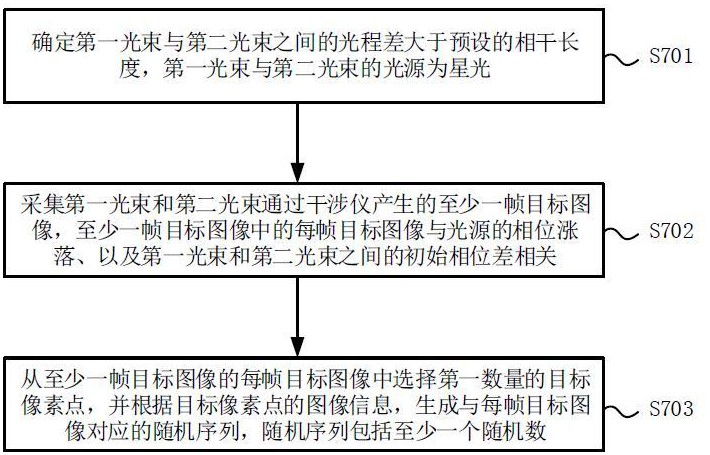
2、第一方面,本技术实施例提供一种基于星体光相干性的随机数生成方法,应用于随机数生成装置,所述随机数生成装置包括干涉仪和图像处理器;所述方法包括:确定第一光束与第二光束之间的光程差大于预设的相干长度,所述第一光束与所述第二光束的光源为星光;利用所述图像处理器采集所述第一光束和所述第二光束通过所述干涉仪产生的至少一帧目标图像,所述至少一帧目标图像中的每帧目标图像与所述光源的相位涨落、以及所述第一光束和所述第二光束之间的初始相位差相关;从所述至少一帧目标图像的每帧目标图像中选择第一数量的目标像素点,并根据所述目标像素点的图像信息,生成与所述每帧目标图像对应的随机序列,所述随机序列包括至少一个随机数。
3、在本技术实施例中,当随机数生成装置确定第一光束与第二光束之间的光程差大于相干长度时,则可确定两束光之间不存在相干性,由于第一光束和第二光束的光源为星光,星光的相位涨落以及第一光束与第二光束之间的初始相位差均是随机的,因此,第一光束和第二光束通过干涉仪产生的至少一帧目标图像为无规律图像,进一步的,随机数生成装置能够根据无规律图像的图像信息生成随机性较好的随机数。也就是说,本技术实施例利用在第一光束和第二光束之间不存在相干性时,第一光束和第二光束之间的相位差的随机性,生成随机性较好的随机数。
4、并且,相较于现有技术中的真随机数生成方法,第一,本技术实施例中第一光束和第二光束的光源为星光,星光无需特意设置特定装置采集,即光源易得;第二,本技术实施例利用第一光束和第二光束之间不存在相干性时所产生的无规律图像的图像信息,生成随机数,无需通过多个设备采集光强后再转换为频率或振幅信息再生成随机数,随机性提取过程更加简便快捷,提高了随机数生成效率。
5、另外,本技术实施例中还可实时获取多帧图像,每帧图像中的每个像素点均可生成一个随机数,因此,本技术所提供的随机数生成方法可实时批量地生成随机数,进一步提高了随机数生成效率。
6、在一种可能的实施方式中,从所述至少一帧目标图像的每帧目标图像中选择第一数量的目标像素点,并根据所述目标像素点的图像信息,生成与所述每帧目标图像对应的随机序列,包括:确定所述每个目标像素点的光度值;基于所述每个目标像素点的光度值与干扰值之间的差值,确定与所述每个目标像素点对应的随机数,所述干扰值用于表示所述每帧目标图像中的光强的平均值;根据与所述每帧目标图像中的目标像素点对应的随机数,组成为所述每帧目标图像的随机序列。
7、在该实施方式中,由于至少一帧目标图像均是无规律图像,因此,无规律图像的图像信息均是随机的,在这种情况下,每帧目标图像中的每个像素点的光的强度均是不同的,因此,随机数生成装置将每个目标像素点的光度值与干扰值之间的差值,确定为该目标像素点所对应的随机数,简化了随机数生成过程,有利于提高随机数的生成效率。
8、在一种可能的实施方式中,在基于所述每个目标像素点的光度值与干扰值之间的差值,确定与所述每个目标像素点对应的随机数之前,所述方法还包括:获取所述每帧目标图像中的每个像素点的光度值;根据所述每帧目标图像中的所有像素点的光度值的均值,确定所述每帧目标图像的所述干扰值。
9、在该实施方式中,为了使每个像素点的图像特征更加明显,本技术实施例中将每帧目标图像的光度值的均值,作为每帧目标图像的干扰值,进而可在确定每个目标像素点的随机数时,去除干扰值的影响。
10、在一种可能的实施方式中,所述图像处理器包括感光元件,所述感光元件的感光平面与所述干涉仪间隔第一预设距离相对竖直设置,使得所述第一光束和所述第二光束通过所述干涉仪后能够照射在所述感光平面上;利用所述图像处理器采集所述第一光束和所述第二光束通过所述干涉仪产生的至少一帧目标图像,包括:通过所述感光元件,探测每个时刻所述第一光束和所述第二光束通过所述干涉仪在所述感光平面的每个位置上产生的光强,所述光强与所述光源的相位涨落、以及所述第一光束和所述第二光束之间的初始相位差相关;将所述每个时刻所述感光平面上的所述每个位置的光强转换为数字图像信号,获得至少一帧目标图像。
11、在该实施方式中,由于在第一光束与第二光束之间的光程差大于预设相干长度时,基于光源的相位涨落以及第一光束与第二光束之间的初始相位差的随机性的影响,第一光束与第二光束照射在感光元件的感光平面的每个位置的光强也是随机的,使得感光元件将光强转换为数据图像信号后,数字图像信号同样具备随机性。
12、在一种可能的实施方式中,所述干涉仪包括双缝板;确定第一光束与第二光束之间的光程差大于预设的相干长度,包括:当所述双缝板的旋转角度位于预设角度范围内时,确定所述第一光束与所述第二光束之间的光程差大于所述相干长度;或者,所述干涉仪包括双缝板和延迟片,所述延迟片设置在所述双缝板与所述感光元件之间,使得所述第一光束和所述第二光束中的任一光束通过所述延迟片后能够照射在所述感光平面上或所述光屏上;确定第一光束与第二光束之间的光程差大于预设的相干长度,包括:当所述延迟片与所述双缝板之间的距离大于第二预设距离时,确定所述第一光束与所述第二光束之间的光程差大于所述相干长度。
13、在一种可能的实施方式中,所述预设角度范围的最小角度为第一旋转角度;所述方法还包括:根据预存的参考角度参数集合,以及预设的光程差表达式,计算所述参考角度参数集合中每个参考角度参数下的光程差,获得第一参考光程差集合;根据第一预设条件,从所述第一参考光程差集合中确定出满足所述第一预设条件的参考光程差,获得第二参考光程差集合,所述第一预设条件用于指示所述第二参考光程差集合中的任一参考光程差大于所述相干长度;确定用于计算所述第二参考光程差集合中的每个参考光程差的参考角度参数,获得第一参考角度参数集合;根据第二预设条件,从所述第一参考角度参数集合中选择满足所述第二预设条件的参考角度参数作为所述第一旋转角度,所述第二预设条件指示所述第一参考角度参数集合中的最小角度为所述第一旋转角度。
14、在一种可能的实施方式中,所述预设角度范围的最大角度为第二旋转角度;所述方法还包括:根据第三预设条件,从所述第一参考光程差集合中确定出满足所述第三预设条件的参考光程差,获得第三参考光程差集合,所述第三预设条件指示所述第三参考光程差集合中的任一参考光程差与在所述第一旋转角度下的参考光程差之间的差值大于所述相干长度;确定用于计算所述第三参考光程差集合中的每个参考光程差的参考角度参数,获得第二参考角度参数集合;根据第四预设条件,从所述第二参考角度参数集合中选取满足所述第四预设条件的参考角度参数作为所述第二旋转角度,所述第四预设条件指示所述第二参考角度参数集合中的最大值为所述第二旋转角度,且所述第二旋转角度小于预设角度阈值。
15、在一种可能的实施方式中,所述第二预设距离是根据所述延迟片的厚度和折射率确定的。
16、第二方面,本技术实施例提供一种随机数生成装置,所述随机数生成装置包括干涉仪、图像处理器和控制器,其中:所述控制器,用于确定第一光束与第二光束之间的光程差大于预设的相干长度,所述第一光束与所述第二光束的光源为星光;所述图像处理器,用于采集所述第一光束和所述第二光束通过所述干涉仪产生的至少一帧目标图像,所述至少一帧目标图像中的每帧目标图像与所述光源的相位涨落、以及所述第一光束和所述第二光束之间的初始相位差相关;所述控制器,还用于从所述至少一帧目标图像的每帧目标图像中选择第一数量的目标像素点,并根据所述目标像素点的图像信息,生成与所述每帧目标图像对应的随机序列,所述随机序列包括至少一个随机数。
17、在一种可能的实施方式中,所述图像处理器包括感光元件,所述感光元件的感光平面与所述干涉仪间隔第一预设距离相对竖直设置,使得所述第一光束和所述第二光束通过所述干涉仪后能够照射在所述感光平面上;其中,所述感光元件,用于探测每个时刻所述第一光束和所述第二光束通过所述干涉仪在所述感光平面的每个位置上产生的光强,所述光强与所述光源的相位涨落、以及所述第一光束和所述第二光束之间的初始相位差相关,以及将所述每个时刻所述感光平面上所述每个位置的光强转换为数字图像信号,获得至少一帧目标图像。
18、在一种可能的实施方式中,所述随机数生成装置还包括光屏,所述图像处理器包括采集元件,所述光屏与所述干涉仪间隔第一预设距离相对竖直设置,使得所述第一光束和所述第二光束通过所述干涉仪后能够照射在所述光屏上;其中,所述采集元件,用于采集所述第一光束和所述第二光束通过所述干涉仪在所述光屏上产生的至少一帧目标图像。
19、在一种可能的实施方式中,所述随机数生成装置还包括驱动器;所述干涉仪包括双缝板,所述双缝板设置在感光元件或光屏的前方,所述双缝板与所述感光平面或所述光屏间隔第三预设距离相对竖直设置;所述双缝板与所述驱动器相连;其中,所述驱动器,用于接收来自所述控制器的第一控制信号,并在所述第一控制信号的控制下带动所述双缝板绕中心轴在预设角度范围内旋转,使得第一光束与第二光束之间的光程差大于所述相干长度,所述中心轴设置在所述双缝板的中心位置;或者,所述干涉仪包括双缝板和延迟片,所述延迟片设置在所述双缝板与所述感光元件或所述光屏之间,使得所述第一光束和所述第二光束中的任一光束通过所述延迟片后能够照射在所述感光平面上或所述光屏上;所述延迟片与所述驱动器相连;其中,所述驱动器,用于接收来自所述控制器的第二控制信号,并在所述第二控制信号的控制下带动所述延迟片在第二预设距离内平移,使得第一光束与第二光束之间的光程差大于所述相干长度。
20、第三方面,本技术实施例提供一种随机数生成装置,包括:确定模块,用于确定第一光束与第二光束之间的光程差大于预设的相干长度,所述第一光束与所述第二光束的光源为星光;获取模块,用于利用随机数生成装置中的图像处理器采集所述第一光束和所述第二光束通过随机数生成装置中的干涉仪产生的至少一帧目标图像,所述至少一帧目标图像中的每帧目标图像与所述光源的相位涨落、以及所述第一光束和所述第二光束之间的初始相位差相关;随机数生成模块,用于从所述至少一帧目标图像的每帧目标图像中选择第一数量的目标像素点,并根据所述目标像素点的图像信息,生成与所述每帧目标图像对应的随机序列,所述随机序列包括至少一个随机数。
21、在一种可能的实施方式中,所述随机数生成模块,具体用于:确定所述每个目标像素点的光度值;基于所述每个目标像素点的光度值与干扰值之间的差值,确定与所述每个目标像素点对应的随机数,所述干扰值用于表示所述每帧目标图像中的光强的平均值;根据与所述每帧目标图像中的目标像素点对应的随机数,组成为所述每帧目标图像的随机序列。
22、在一种可能的实施方式中,所述随机数生成模块,还用于在基于所述每个目标像素点的光度值与干扰值之间的差值,确定与所述每个目标像素点对应的随机数之前,获取所述每帧目标图像中的每个像素点的光度值;根据所述每帧目标图像中的所有像素点的光度值的均值,确定所述每帧目标图像的所述干扰值。
23、在一种可能的实施方式中,所述图像处理器包括感光元件,所述感光元件的感光平面与所述干涉仪间隔第一预设距离相对竖直设置,使得所述第一光束和所述第二光束通过所述干涉仪后能够照射在所述感光平面上;所述获取模块,具体用于:通过所述感光元件,探测每个时刻所述第一光束和所述第二光束通过所述干涉仪在所述感光平面的每个位置上产生的光强,所述光强与所述光源的相位涨落、以及所述第一光束和所述第二光束之间的初始相位差相关;将所述每个时刻所述感光平面上的所述每个位置的光强转换为数字图像信号,获得至少一帧目标图像。
24、在一种可能的实施方式中,所述干涉仪包括双缝板;所述确定模块,具体用于:当所述双缝板的旋转角度位于预设角度范围内时,确定所述第一光束与所述第二光束之间的光程差大于所述相干长度;或者,所述干涉仪包括双缝板和延迟片,所述延迟片设置在所述双缝板与所述感光元件之间,使得所述第一光束和所述第二光束中的任一光束通过所述延迟片后能够照射在所述感光平面上或所述光屏上;所述确定模块,具体用于:当所述延迟片与所述双缝板之间的距离大于第二预设距离时,确定所述第一光束与所述第二光束之间的光程差大于所述相干长度。
25、在一种可能的实施方式中,所述预设角度范围的最小角度为第一旋转角度;所述确定模块,还用于根据预存的参考角度参数集合,以及预设的光程差表达式,计算所述参考角度参数集合中每个参考角度参数下的光程差,获得第一参考光程差集合,以及根据第一预设条件,从所述第一参考光程差集合中确定出满足所述第一预设条件的参考光程差,获得第二参考光程差集合,所述第一预设条件用于指示所述第二参考光程差集合中的任一参考光程差大于所述相干长度,以及确定用于计算所述第二参考光程差集合中的每个参考光程差的参考角度参数,获得第一参考角度参数集合,以及根据第二预设条件,从所述第一参考角度参数集合中选择满足所述第二预设条件的参考角度参数作为所述第一旋转角度,所述第二预设条件指示所述第一参考角度参数集合中的最小角度为所述第一旋转角度。
26、在一种可能的实施方式中,所述预设角度范围的最大角度为第二旋转角度;所述确定模块,还用于根据第三预设条件,从所述第一参考光程差集合中确定出满足所述第三预设条件的参考光程差,获得第三参考光程差集合,所述第三预设条件指示所述第三参考光程差集合中的任一参考光程差与在所述第一旋转角度下的参考光程差之间的差值大于所述相干长度,以及确定用于计算所述第三参考光程差集合中的每个参考光程差的参考角度参数,获得第二参考角度参数集合;根据第四预设条件,从所述第二参考角度参数集合中选取满足所述第四预设条件的参考角度参数作为所述第二旋转角度,所述第四预设条件指示所述第二参考角度参数集合中的最大值为所述第二旋转角度,且所述第二旋转角度小于预设角度阈值。
27、在一种可能的实施方式中,所述第二预设距离是根据所述延迟片的厚度和折射率确定的。
28、第四方面,本技术实施例提供一种随机数生成设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述至少一个处理器通过执行所述存储器存储的指令实现如第一方面及任一可能的实施方式所述的方法。
29、第五方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,当所述计算机指令在计算机上运行时,使得计算机执行如第一方面及任一可能的实施方式所述的方法。
30、第六方面,本技术实施例提供一种计算机程序产品,包含有计算机指令,当其在计算机上运行时,使得上述如前文第一方面及任一可能的实施方式所述的方法被实现。
31、关于第二方面至第六方面的有益效果可参照前文第一方面所述的内容,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!