三维血管图像重建方法、装置、计算机设备和存储介质与流程
本技术涉及图像处理,特别是涉及一种三维血管图像重建方法、装置、计算机设备和存储介质。
背景技术:
1、ivus(intravascular ultrasound,血管内超声)是一种在血管内部使用超声波技术的影像学工具。它通过将超声探头插入血管内,能够提供高分辨率的血管壁结构和血流动力学的信息。ivus技术的发展为心血管疾病的诊断和治疗提供了重要的辅助手段。相比于传统的x射线血管造影技术,ivus能够提供更高分辨率的血管内部图像,能够清晰地显示血管壁的结构和病变情况。ivus技术具有非侵入性的特点,能够提供实时的血管内部图像,医生可以即时观察血管的状况。这对于指导介入手术、评估治疗效果和预测术后并发症等方面具有重要意义。目前已经被广泛应用于介入导管实验室,并被各大医疗指南推荐。
2、当前主流的ivus系统以二维断层扫描序列的方式呈现血管组织信息,不够直观形象,需要使用者具备较强的血管组织结构相关的知识基础和空间想象能力,才能从ivus扫描序列图中准确获取相关信息。因此,在ivus扫描技术之上,构建出一个带有真实结构信息的三维血管图像是有重要意义的。它可以提高对血管结构的可视化和定量分析能力,为临床医生提供更准确的血管诊断和治疗决策支持。
3、目前常见相关技术是基于ivus和数字减影血管造影(digital subtractionangiography,dsa)的血管几何三维重建技术。该技术除了使用ivus系统外,还需要依赖于dsa设备,通过两个或更多角度的dsa造影图像来获取目标血管的弯曲形态信息,以确定血管三维中心线,然后再将ivus图像序列在血管三维中心线上进行定位和定向计算,从而得到血管三维图像。由于ivus图像序列与多角度的dsa造影图像并不是同一时间采集获得的,并且两种数据一般需要分别从两种不同的设备上获取,难以将ivus图像序列准确地定位到dsa造影图像所构建的血管三维中心线上。因此,目前的三维血管图像重建方法,存在三维血管图像重建精度低的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高三维血管图像的重建精度的三维血管图像重建方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种三维血管图像重建方法,包括:
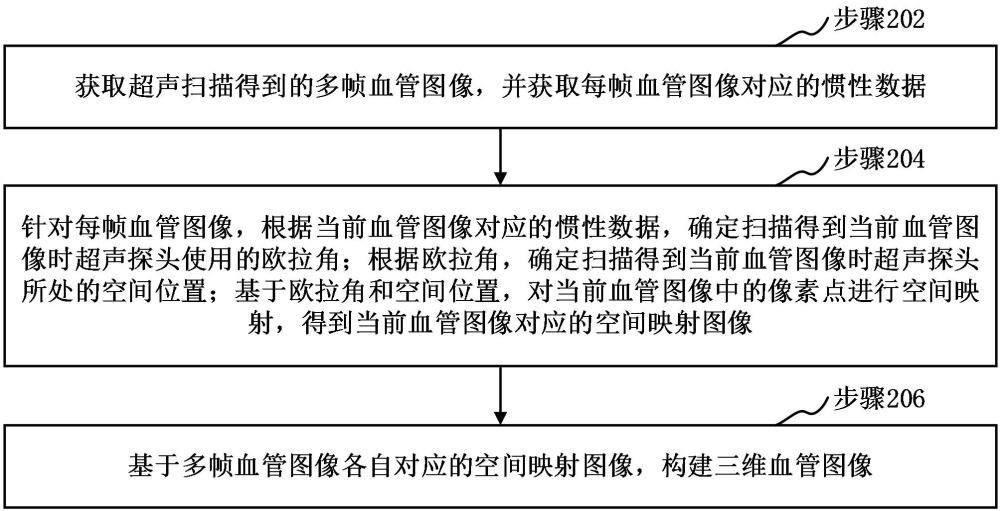
3、获取超声扫描得到的多帧血管图像,并获取每帧血管图像对应的惯性数据;
4、针对每帧血管图像,根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角;根据欧拉角,确定扫描得到当前血管图像时超声探头所处的空间位置;基于欧拉角和空间位置,对当前血管图像中的像素点进行空间映射,得到当前血管图像对应的空间映射图像;
5、基于多帧血管图像各自对应的空间映射图像,构建三维血管图像。
6、在其中一个实施例中,惯性数据包括三轴加速度;根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角,包括:
7、获取当前血管图像对应的三轴加速度分别与参考坐标系中每个轴方向的夹角,并作为扫描得到当前血管图像时超声探头使用的欧拉角。
8、在其中一个实施例中,惯性数据包括三轴加速度和三轴角速度;根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角,包括:
9、将当前血管图像对应的三轴加速度分别与参考坐标系中每个轴方向的夹角,作为扫描得到当前血管图像时超声探头使用的第一欧拉角;
10、将当前血管图像对应的三轴角速度进行积分,得到扫描得到当前血管图像时的欧拉角变化;基于欧拉角变化,确定扫描得到当前血管图像时超声探头使用的第二欧拉角;
11、融合第一欧拉角和第二欧拉角,得到扫描得到当前血管图像时超声探头使用的欧拉角。
12、在其中一个实施例中,融合第一欧拉角和第二欧拉角,得到扫描得到当前血管图像时超声探头使用的欧拉角,包括:
13、确定第一欧拉角和第二欧拉角之间的第一角度差;
14、在第一角度差大于预设角度阈值的情况下,将第一欧拉角作为扫描得到当前血管图像时超声探头使用的欧拉角;
15、在第一角度差不大于预设角度阈值的情况下,将第一欧拉角和第二欧拉角加权求和,将得到的结果作为扫描得到当前血管图像时超声探头使用的欧拉角。
16、在其中一个实施例中,根据欧拉角,确定扫描得到当前血管图像时超声探头所处的空间位置,包括:
17、获取超声探头的初始空间位置和扫描得到当前血管图像时超声探头使用的回撤速度;
18、确定欧拉角和扫描得到在前血管图像时超声探头使用的目标欧拉角之间的第二角度差;在前血管图像为当前血管图像的前一帧图像;
19、根据回撤速度和角度差,得到扫描得到当前血管图像时超声探头的回撤距离;
20、根据初始空间位置和扫描得到当前血管图像,以及当前血管图像之前的所有帧血管图像时超声探头的回撤距离,得到扫描得到当前血管图像时超声探头所处的空间位置。
21、在其中一个实施例中,基于欧拉角和空间位置,对当前血管图像中的像素点进行空间映射,得到当前血管图像对应的空间映射图像,包括:
22、将当前血管图像映射至所对应的空间位置上,根据空间位置对应的欧拉角对当前血管图像中的像素点进行三维旋转,得到当前血管图像对应的空间映射图像。
23、在其中一个实施例中,根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角,包括:
24、获取旋转电机的码盘的转角;旋转电机用于驱动超声探头;
25、根据码盘转角,对当前血管图像对应的惯性数据进行反馈控制;
26、根据当前血管图像对应的反馈控制后的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角。
27、在其中一个实施例中,欧拉角包括自转角、章动角和旋进角;基于欧拉角和空间位置,对当前血管图像中的像素点进行空间映射,得到当前血管图像对应的空间映射图像,包括:
28、根据扫描得到当前血管图像时超声探头使用的自转角,对当前血管图像进行二维重建,得到二维重建图像;
29、基于扫描得到当前血管图像时超声探头使用的章动角、旋进角和所处的空间位置,对二维重建图像中的像素点进行空间映射,得到当前血管图像对应的空间映射图像。
30、第二方面,本技术还提供了一种三维血管图像重建装置,包括:
31、获取模块,用于获取超声扫描得到的多帧血管图像,并获取每帧血管图像对应的惯性数据;
32、映射模块,用于针对每帧血管图像,根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角;根据欧拉角,确定扫描得到当前血管图像时超声探头所处的空间位置;基于欧拉角和空间位置,对当前血管图像中的像素点进行空间映射,得到当前血管图像对应的空间映射图像;
33、构建模块,用于基于多帧血管图像各自对应的空间映射图像,构建三维血管图像。
34、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
35、获取超声扫描得到的多帧血管图像,并获取每帧血管图像对应的惯性数据;
36、针对每帧血管图像,根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角;根据欧拉角,确定扫描得到当前血管图像时超声探头所处的空间位置;基于欧拉角和空间位置,对当前血管图像中的像素点进行空间映射,得到当前血管图像对应的空间映射图像;
37、基于多帧血管图像各自对应的空间映射图像,构建三维血管图像。
38、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
39、获取超声扫描得到的多帧血管图像,并获取每帧血管图像对应的惯性数据;
40、针对每帧血管图像,根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角;根据欧拉角,确定扫描得到当前血管图像时超声探头所处的空间位置;基于欧拉角和空间位置,对当前血管图像中的像素点进行空间映射,得到当前血管图像对应的空间映射图像;
41、基于多帧血管图像各自对应的空间映射图像,构建三维血管图像。
42、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
43、获取超声扫描得到的多帧血管图像,并获取每帧血管图像对应的惯性数据;
44、针对每帧血管图像,根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角;根据欧拉角,确定扫描得到当前血管图像时超声探头所处的空间位置;基于欧拉角和空间位置,对当前血管图像中的像素点进行空间映射,得到当前血管图像对应的空间映射图像;
45、基于多帧血管图像各自对应的空间映射图像,构建三维血管图像。
46、上述三维血管图像重建方法、装置、计算机设备、存储介质和计算机程序产品,通过获取超声扫描得到的多帧血管图像,并获取每帧血管图像对应的惯性数据,针对每帧血管图像,根据当前血管图像对应的惯性数据,确定扫描得到当前血管图像时超声探头使用的欧拉角;根据扫描得到当前血管图像时超声探头使用的欧拉角,确定扫描得到当前血管图像时超声探头所处的空间位置,由于惯性数据与血管图像一一对应,可以准确地确定出扫描得到每帧血管图像时超声探头使用的欧拉角和所处的空间位置,基于每帧下的欧拉角和空间位置对当前血管图像中的像素点进行空间映射,从而构建三维血管图像,有利于提高构建的三维血管图像的精度。
- 还没有人留言评论。精彩留言会获得点赞!