面向自动驾驶仿真测试的高精地图自动构造方法及装置
本发明涉及自动驾驶,尤其涉及一种面向自动驾驶仿真测试的高精地图自动构造方法及装置。
背景技术:
1、高精地图是自动驾驶技术的核心技术之一,它是一种几何描述绝对精度高,包含行车场景中各类静态交通信息的地图。从高精地图实现的目标来看,这项技术涵盖了自动驾驶面临的三个主要挑战:车辆对其环境进行高精度定位的能力;在超过200米的范围内识别和事件反应的能力;涉及车辆需要根据乘客和其他交通参与者的行为进行驾驶的能力。这意味着,自动驾驶技术在很大程度上依赖于在复杂的城市环境中连续、高精度和高可靠性的定位。动态高精地图很大程度上辅助了自动驾驶系统的可靠定位。与传统导航地图只提供道路级数据不同,高精地图包含了更加精细的行车环境,不仅精确到车道级,包含了每个车道的类型,连接属性和限制条件,而且包含了丰富的道路环境相关静态属性,例如建筑物、交通信号灯和道路标志。自动驾驶车辆定位通过高精地图数据的地标作为参考位置,从而得到汽车相对于各种地标的位置的精确定位。
2、除了在实际行车中应用高精地图。高精地图模型还可以帮助开发和测试人员对自动驾驶软件的定位、规划、导航等模块进行测试。为确保自动驾驶软件系统的安全性和可靠性,测试技术是最常用的手段。出于安全和成本等因素考虑,软件在环的仿真测试是主流的场景测试方法。高精地图构成了模拟器中复杂的场景静态部分,由于真实世界高精地图的成本性过高,完整地图缺乏多样性的特性等一系列问题,以低成本、高多样性的方法生成任意数量道路的高精地图环境用于仿真环境测试是十分必要的。目前用于仿真测试的高精地图生成方法存在多样性低、无法自动化生成、需要提供原始高精地图作为输入等问题。
技术实现思路
1、本技术的目的在于提出一种面向自动驾驶仿真测试的高精地图自动构造方法及装置,来解决以上背景技术中提到的高精地图生成方法存在的问题。所述方法包含构建基于高精地图框架简化地图模型,交叉口模型参数的随机,自动化交叉口结构并连结成高精地图。本技术所实现的方法可以根据构建模型随机化参数自动化生成对应opendrive框架的高精地图文件,该地图文件可以导入支持opendrive框架的自动驾驶仿真器如carla,lgsvl,自动驾驶场景绘制器matlab roadrunner以及自动驾驶系统apollo等软件,用于自动驾驶系统的开发和测试。
2、为了实现本技术的目的,本技术采用的技术方案如下:
3、一种面向自动驾驶仿真测试的高精地图自动构造方法,包括:
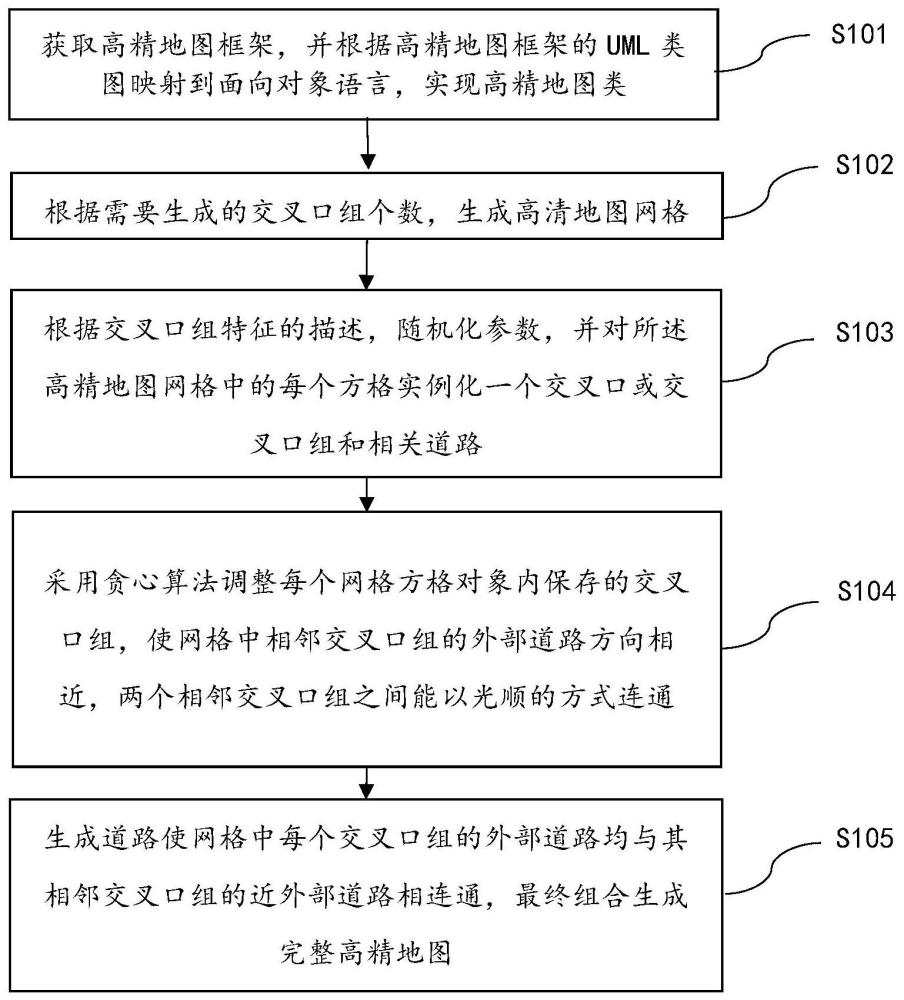
4、获取高精地图框架,并通过将高精地图框架的uml类图映射到面向对象语言,实现高精地图类,其中,所述高精地图类包括:地图文件头、道路、交叉口组和控制器,所述交叉口组由一个或多个交叉口组成,所述控制器用来生成道路的控制信号;
5、根据需要生成的交叉口组个数,生成高清地图网格;
6、基于交叉口组特征的描述,随机化交叉口组参数,并对所述高精地图网格中的每个方格实例化一个交叉口组和相关道路;其中,所述相关道路包括:交叉口组外部连接道路和交叉口内部道路;
7、调整每个方格内生成的交叉口组,使相邻方格的交叉口组外部连接道路易于以光顺的方式连通;
8、生成方格外部的道路使得网格中相邻交叉口组相连,并补充并增加道路使未连接的交叉口组外部连接道路封闭。
9、进一步地,所述交叉口组特征包括:交叉口组编号id、交叉口组包含的交叉口数量n、交叉口组包含的交叉口的编号集合、交叉口组外部连接道路数量c、交叉口组道路连接关系c、交叉口组外部连接道路角度h、交叉口组外部连接道路特征、交叉口组内部道路特征、交叉口控制器。
10、进一步地,在所述交叉口组包含一个交叉口的情况下,所述基于交叉口组特征的描述,随机化交叉口组参数,包括:
11、获取指定的交叉口半径,并根据第一预设范围得到所述交叉口组外部连接道路数量c;
12、根据交叉口组外部连接道路数量c,确定外部连接道路角度集合后,对所述外部连接道路角度集合中的每个元素随机化角度,得到交叉口组外部连接道路角度h;
13、基于所述指定的交叉口半径和所述交叉口组外部连接道路数量c,确定每个交叉口组外部连接道路的参考线起始点坐标;
14、根据第二预设范围随机化确定每一个交叉口组外部连接道路的左车道数量、右车道数量后,基于最大连接化法确定交叉口组外部连接道路连接关系;
15、根据所述参考线起始点坐标和所述交叉口组外部连接道路数量c,确定每个交叉口外部道路的车道起始点坐标;
16、基于所述交叉口组外部连接道路数量c、所述交叉口组外部连接道路的参考线起始点坐标以及所述交叉口组外部连接道路连接关系,确定所述交叉口组内部道路的曲线参数。
17、进一步地,所述最大连接化法遵循的原则,包括:
18、在驶入道路的同一驶出方向上,在保持构建的车道不重叠的情况下,保证所有驶入车道与驶出车道均有车道联通;
19、对驶出车道数与驶入车道数进行整除操作;若能整除,则为驶入车道分配倍数数量的驶出车道;若不能整除,则采用均分原则为驶入车道分配相同数量的驶出车道,且余数按第一设定顺序依次为驶入车道分配一个驶出车道;
20、基于最大化连接为每个驶入车道分配的驶出车道数量,并将驶入车道与驶出车道之间按照第二设定顺序,建立分配数量的连接关系。
21、进一步地,基于所述交叉口组外部连接道路数量c、所述交叉口组外部连接道路的参考线起始点坐标以及所述交叉口组外部连接道路连接关系,确定所述交叉口组内部道路的曲线参数,包括:
22、根据所述交叉口组外部连接道路的参考线起始点坐标和所述交叉口组外部连接道路数量c,确定每个外部连接道路的车道起始点坐标;
23、根据交叉口组外部连接道路连接关系和所述外部连接道路的车道起始点坐标,确定内部道路的曲线;其中,所述内部道路的曲线是基于以驶入道路的车道参考线起点为原点,以驶入道路所在车道参考线角度为uv方向的局部坐标系下得到的三次多项式曲线,所述三次多项式曲线包含三次多项式参数u轴常数项系数au,u轴一次项系数bu,u轴二次项系数cu,u轴三次项系数du,v轴常数项系数av,v轴一次项系数bv,v轴二次项系数cv,v轴三次项系数dv。
24、进一步地,在所述交叉口组包含一个交叉口的情况下,所述基于交叉口组特征的描述,随机化交叉口组参数,包括:
25、获取指定的交叉口半径,并根据第一预设范围得到交叉口组包含交叉口外部连接道路数量c;
26、根据交叉口组外部连接道路数量c,确定外部连接道路角度集合后,对所述外部连接道路角度集合中的每个元素随机化角度,得到交叉口组外部连接道路角度h;
27、基于所述指定的交叉口半径和所述交叉口组外部连接道路数量c,确定每个交叉口组外部连接道路的参考线起始点坐标;
28、根据第二预设范围随机化确定交叉口组外部连接道路的车道数量后,并使每一个交叉口组外部连接道路的车道数量相同;
29、基于最大连接化法确定交叉口组外部连接道路的道路连接关系,以生成交叉口组外部连接道路的车道连接集合;
30、根据所述参考线起始点坐标和所述交叉口组外部连接道路数量c,确定每个交叉口组外部道路的车道起始点坐标;
31、根据所述指定的交叉口半径、所述交叉口组外部连接道路的参考线起始点坐标、所述交叉口组外部连接道路的车道连接集合和所述交叉口组外部道路的车道起始点坐标,确定所述交叉口组内部道路的曲线参数。
32、进一步地,所述交叉口组外部连接道路的元素包括:道路类型、相连道路信息、车道、控制信号、道路表面描述、道路车道横截面描述、道路高度描述和道路参考线描述。
33、进一步地,所述调整实例化的交叉口,以使相邻方格的交叉口外部道路易于以光顺的方式连通,包括:
34、初始化已扩展序列block_v为空,并计算所述网格的中心方格所对应的元素centerblock后,将该元素centerblock加入已扩展序列block_v;
35、初始化局部变量两交叉不同道路之间的道路距离dis=+∞,初始化局部变量i=-1;
36、从i=0到i<size(block_v),遍历已扩展序列block_v中元素,令变量block=block_v[i];
37、当变量block中不存在道路未连接其他交叉口的道路时,令i++;
38、不断旋转邻居方格内的交叉口,找到未连接的道路,直到找到一个距离当前变量block未连接路口的最短距离d;
39、比较最短距离d和道路距离dis的大小;
40、如当前循环结束,若dis!=+∞,则固定道路距离dis对应的邻居旋转角度,并将邻居的变量block加入已扩展序列block_v后,保存道路距离dis对应的两个交叉口外部道路连接信息,且将两个交叉口外部道路记录为已连接;
41、返回至所述从i=0到i<size(block_v),遍历已扩展序列block_v中元素,令变量block=block_v[i],直至道路距离dis==+∞。
42、进一步地,所述实生成方格外部的道路使得网格中相邻交叉口组相连,并补充并增加道路使未连接的交叉口组外部连接道路封闭之前,还包括:
43、修改网格中每个方格中交叉口的id、交叉口组内部道路的id和坐标、交叉口组外部连接道路的id和坐标。
44、一种面向自动驾驶仿真测试的高精地图自动构造装置,包括:
45、地图类实现模块,用于获取高精地图框架,并通过将高精地图框架的uml类图映射到面向对象语言,实现高精地图类,其中,所述高精地图类包括:地图文件头、道路、交叉口组和控制器,所述交叉口组由一个或多个交叉口组成,所述控制器用来生成道路的控制信号;
46、网格生成模块,用于根据需要生成的交叉口组个数,生成高清地图网格;
47、交叉口实例化模块,用于基于交叉口组特征的描述,随机化交叉口组参数,并对所述高精地图网格中的每个方格实例化一个交叉口组和相关道路;其中,所述相关道路包括:交叉口组外部连接道路和交叉口内部道路;
48、交叉口调整模块,用于调整每个方格内生成的交叉口组,使相邻方格的交叉口组外部连接道路易于以光顺的方式连通;
49、地图生成模块,用于生成方格外部的道路使得网格中相邻交叉口组相连,并补充并增加道路使未连接的交叉口组外部连接道路封闭。
50、与现有技术相比,真实环境采集生成的高精地图需要拥有高精地图采集资质的企业人员驾驶配备高精度传感器的采集车辆实地多次采集,并经过处理原始数据和人工审核校验等多个环节。整个生产流程成本高耗时长。普通开发人员难以获取真实高精地图用于仿真测试。一些自动驾驶系统开发和测试人员采用手工绘制的高精地图用于仿真测试,手工绘制的方法难以生成大量高精地图。同使用模型构建的高精地图方法相比,本发明实现的面向仿真测试的高精地图生成方法自动化程度更高,同时包含了环岛(交叉口组)等不同特征地图元素。同现有仿真模拟器提供的地图相比,包含的交叉口形状多样性以及拓扑连接关系更丰富,地图面积更小,便于仿真测试。
- 还没有人留言评论。精彩留言会获得点赞!