基于超图邻域差分特征增强的社交机器人检测方法及系统
本发明属于社交机器人检测,特别涉及一种基于超图邻域差分特征增强的社交机器人检测方法及系统。
背景技术:
1、在线社交网络(osn)已成为人们生活中不可或缺的一部分。然而,osn受到大量社交机器人的困扰,这些自动化程序旨在从事广告、话题猜测、情绪煽动和其他恶意行为,对真实用户造成负面影响。
2、由于社交机器人不断发展的性质,检测社交机器人仍然是一个持久的挑战。早期的机器人检测方法依赖于提取或设计特征以及训练机器学习或神经网络分类器。这些功能涵盖了各个方面,包括关注者和好友数量、推文频率和创建日期。随后的研究转向从机器人生成的帖子中提取特征,从而提高了检测准确性。图神经网络(gnn)的最新进展提供了一条很有前途的途径,通过更好地了解异常用户和合法用户之间的隐含关系,以提高检测效率。基于gnn的方法将社交机器人检测挑战作为一个节点分类任务,将社交网络用户视为社交图中的节点。用户之间的关系(例如关注者和朋友)在这个图中表示为边。与传统的基于特征的方法相比,基于gnn的方法可以有效地利用用户交互模式,从而实现出色的检测性能。
3、自2016年以来,新一代社交机器人已经出现,融合了人工操作和自动化行为。这种混合使它们能够有效地伪装自己并逃避传统的基于分类器的平台的检测,从而导致一个正在进行的“猫鼠游戏”。这种动态刺激了创新解决方案、伪装和对策的不断发展。最近的研究揭示了社交机器人中的异性伪装行为,这些机器人故意遵循人类账户,导致社交图中类间边缘的扩散。如图1所示,类间边缘对gnn的邻域聚合产生负面影响,从而使得检测机器人更具挑战性。
技术实现思路
1、本发明的目的在于解决gnn中邻域聚合期间大量类间边缘产生负面影响的问题,提出一种基于超图邻域差分特征增强的社交机器人检测方法及系统,通过构造和增强差分特征,在具有丰富类间边缘的图中实现了更好的节点表示,以获得准确的检测结果。
2、为了实现上述目的,本发明采用以下的技术方案:
3、一种基于超图邻域差分特征增强的社交机器人检测方法,包含:
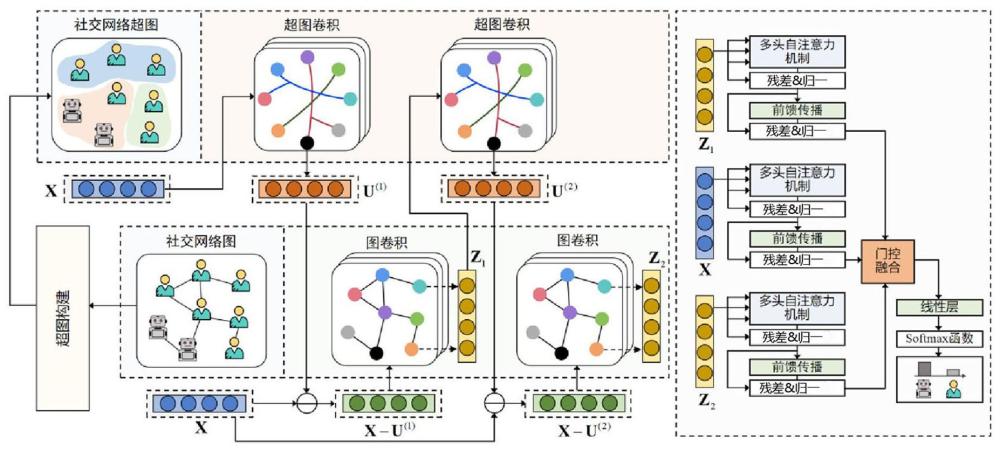
4、利用用户推文特征,使用knn算法完成超边构造,将用户社交图转化为超图;
5、采用超图卷积来提取社交账户的高阶邻域特征;
6、通过特征差分机制,使用原始特征和高阶邻域特征生成不同邻域尺度的差分特征,将这些差分特征输入到图神经网络中进一步增强;
7、采用自注意力机制来增强差分特征和原始特征,将增强后的差分特征与原始特征进行融合,融合的特征被输入到线性层,再采用softmax函数以获得分类结果。
8、根据本发明基于超图邻域差分特征增强的社交机器人检测方法,进一步地,在使用knn算法构建超边时,首先从用户特征中提取推文特征,然后计算每个节点k跳邻域内余弦相似度最大的t个节点,使用超边连接上述节点,k和t为可调参数。
9、根据本发明基于超图邻域差分特征增强的社交机器人检测方法,进一步地,超图定义为:其中表示节点集合,表示超边集合;超图的拓扑结构使用关联矩阵表示:
10、
11、节点vi的度被定义为:超边ei的度被定义为:w∈∈为节点v∈与超边上其余t个节点的t个余弦相似度的平均值,和均为对角矩阵。
12、根据本发明基于超图邻域差分特征增强的社交机器人检测方法,进一步地,采用超图卷积来提取社交账户的高阶邻域特征,用公式(2)表示:
13、
14、其中,表示节点vi在l+1层的表征向量,σ表示激活函数,hi∈表示关联矩阵第i行第∈列的元素,hj∈表示关联矩阵第j行第∈列的元素,i,j,∈均为正整数变量,表示第j个节点在l层的表征向量,p表示可训练的权重矩阵,u(0)=x;其矩阵形式如下:
15、u(l+1)=σ(hwhtu(l)p) (3)
16、其中,h表示超图的关联矩阵,w表示超边权重矩阵;对称正则化被应用于hwht,矩阵形式进一步表示如下:
17、u(l+1)=σ(d-1/2hwb-1htd-1/2u(l)p) (4)
18、其中,d和b分别表示节点和边的度矩阵。
19、根据本发明基于超图邻域差分特征增强的社交机器人检测方法,进一步地,使用原始特征和高阶邻域特征生成不同邻域尺度的差分特征,将这些差分特征输入到图神经网络中进一步增强,包含:
20、利用超图卷积得到高阶邻域特征u(l),通过减去原始特征x得到差分特征x-u(l),该差分特征被输入到gnn中以进一步增强;在gcn中,节点特征矩阵表示为:
21、zl=σ(d-1/2ad-1/2(x-u(l))wl) (5)
22、其中,a表示图的邻接矩阵,wl是一个可学习的权重矩阵。
23、根据本发明基于超图邻域差分特征增强的社交机器人检测方法,进一步地,采用自注意力机制来增强差分特征和原始特征,包含:
24、采用多头自注意力模块来探索zl中的交互,对于自注意力机制的第s个头,gcn中节点特征矩阵进一步表示为:
25、
26、其中,是可学习的参数矩阵;
27、连接获得的s个注意力头的输出结果,经过可训练的转换矩阵wo得到如公式(7)表示:
28、
29、同样,经过自注意力机制后,x被转化为
30、根据本发明基于超图邻域差分特征增强的社交机器人检测方法,进一步地,将增强后的差分特征与原始特征进行融合,融合后的特征表示如下:
31、
32、式中,·表示逐元素乘法,gx和通过公式(9)计算得到:
33、g*=sigmod(w*(*)) (9)
34、式中,w*表示可学习的参数矩阵,*∈{x,z1,z2...,zl},sigmod表示激活函数,将融合特征z输入线性层,然后利用softmax函数获得分类结果:
35、
36、式中,wz和b表示可训练的参数矩阵。
37、根据本发明基于超图邻域差分特征增强的社交机器人检测方法,进一步地,采用损失函数来训练模型,损失函数公式如下:
38、
39、式中,y=[yn]分别表示预测类别和真实类别。
40、一种基于超图邻域差分特征增强的社交机器人检测系统,用于实现如上述的基于超图邻域差分特征增强的社交机器人检测方法,包括超图构建模块、超图卷积模块、特征差分增强模块和特征融合模块,其中,
41、超图构建模块,用于利用用户推文特征,使用knn算法完成超边构造,将用户社交图转化为超图;
42、超图卷积模块,用于采用超图卷积来提取社交账户的高阶邻域特征;
43、特征差分增强模块,用于通过特征差分机制,使用原始特征和高阶邻域特征生成不同邻域尺度的差分特征,将这些差分特征输入到图神经网络中进一步增强;
44、特征融合模块,用于采用自注意力机制来增强差分特征和原始特征,将增强后的差分特征与原始特征进行融合,融合的特征被输入到线性层,再采用softmax函数以获得分类结果。
45、与现有技术相比,本发明具有以下优点:
46、本发明通过引入邻域差分增强图神经网络(nde-gnn)以减轻gnn中邻域聚合期间大量类间边缘的影响,具体来说,采用超图神经网络来提取社交账户的高阶邻域特征,通过特征差分机制,使用原始特征和高阶邻域特征生成不同邻域尺度的差分特征,此外,这些差分特征被输入到图神经网络中以进行额外的增强;再采用自注意力机制来增强图卷积特征,最后将增强后的差分特征和原始特征融合,最终实现了社交机器人的检测。
47、本发明通过超图神经网络能够更有效的提取社交图中的高阶邻域特征,通过构造和增强差分特征,在具有丰富类间边缘的图中实现了更好的节点表示,以解决社交机器人检测中的异性伪装问题,提高社交机器人检测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!