针对雷达距离扩展目标的检测器构建和优化方法
本发明属于雷达,尤其涉及一种针对雷达距离扩展目标的检测器构建和优化方法。
背景技术:
1、近年来,电子信息技术的飞速发展带动了雷达系统体制的革新。以成像雷达,多输入多输出(multiple-input multiple-output,mimo)雷达,认知雷达(cognitive radar,cr)为代表的新体制雷达极大地丰富了雷达的使用功能,扩展了雷达的应用领域。高精度,多任务和智能化是未来雷达系统的发展趋势。对于传统的低分辨率雷达而言,雷达距离分辨单元大于目标尺寸,目标的雷达回波只占据雷达的一个距离分辨单元,因此在信号处理时通常视为一个“点目标”进行处理。随着成像雷达等高距离分辨率雷达的广泛使用,雷达的距离分辨单元逐渐小于目标的物理尺寸,目标的雷达回波占据数个雷达距离分辨单元,此类目标称为雷达距离扩展目标。
2、现有技术中,雷达目标检测往往基于匹配滤波实现,即将雷达的回波信号经匹配滤波处理后与检测门限进行比较,进而判断目标是否存在。以上方法主要立足于“点目标”假设。然而,基于“点目标”假设的雷达目标检测器与优化方法难以直接应用于距离扩展目标,其关键原因有两个:其一,距离扩展目标的雷达回波是发射波形与目标冲击响应(target impulse response,tir)的卷积形式,而非“点目标”所对应的发射波形尺度变换;其二,距离扩展目标的tir对雷达频段,视角等因素十分敏感,在探测前难以精确已知,而检测器的检测性能却与tir深度耦合,当目标真实tir与预设的tir失配时,雷达检测器的检测性能将急剧下降。
技术实现思路
1、针对目前雷达距离扩展目标检测过程中存在的困难,本发明提供一种针对雷达距离扩展目标的检测器设计与优化方法,能够根据tir的分布情况自适应的设计目标检测器提升对雷达距离扩展目标的探测能力。
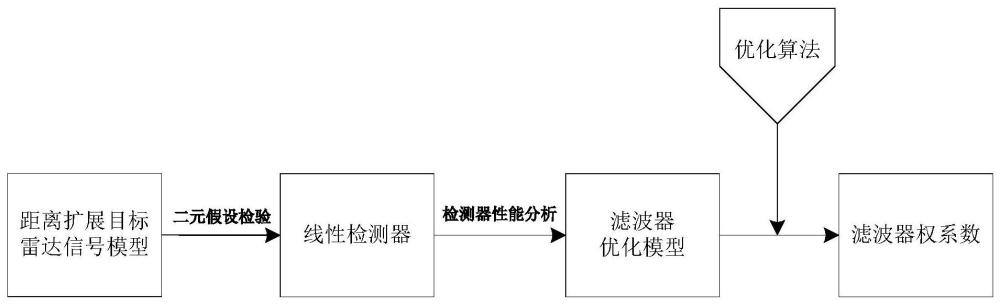
2、为实现上述目的,本发明公开的一种针对雷达距离扩展目标的检测器构建和优化方法,包括以下步骤:
3、s1:将距离扩展目标的目标冲击响应t视作一个随机向量,对应的雷达回波表示为雷达发射信号s和t的卷积形式,引入高斯噪声向量n模拟雷达系统噪声和环境干扰,构建距离扩展目标雷达回波模型;
4、s2:将距离扩展目标的检测问题表示成二元假设检验问题,基于距离扩展目标的雷达回波模型,利用neyman-pearson检测器的1阶taylor展开式对雷达回波模型进行线性近似,当内积超过检测门限γ时判定回波中存在目标,否则判定回波中不存在目标;
5、s3:在neyman-pearson准则下将检测门限γ表示成以虚警概率pfa为自变量的函数,得到在给定虚警概率pfa条件下,检测概率pd与接收滤波器权矢量w之间的解析关系,完成检测器性能分析;
6、s4:基于步骤s3中得到的检测概率pd与接收滤波器权矢量w之间的解析关系,利用函数的单调性,将检测器性能优化建模为一个带约束的优化问题;采取迭代算法求解所建立的优化问题,算法从一个初始点开始,每次迭代完成一次优化变量的更新,直至收敛,则完成了检测器性能优化,得到最终优化后的接收滤波器权矢量
7、更进一步地,所述的构建距离扩展目标雷达回波模型,包括:
8、雷达发射长度为l的电磁信号s对空间进行探测,雷达信号经距离扩展目标反射后被雷达接收,接收信号y的表达式为:
9、y=st+n
10、式中,n表示高斯噪声向量,t表示长度为q的距离扩展目标的tir向量,s表示增广的雷达发射信号矩阵,具体表达式为:
11、s=[j0s,j1s,...,jq-1s]
12、ji表示移位矩阵,i表示下标索引,取值范围为0≤i≤q-1,ji矩阵的第m行,n列的元素为:
13、
14、式中,m,n的取值范围分别为1≤m≤q+l-1,1≤n≤l;距离扩展目标的tir向量服从期望为t0,协方差矩阵为rt的复高斯分布,t0表示距离扩展目标的tir向量的一个具体估计;高斯噪声向量n服从期望为0,协方差矩阵为rn的复高斯分布。
15、更进一步地,所述二元假设检验问题为:
16、
17、式中,h0表示回波中不存在目标,h1表示回波中存在目标。
18、更进一步地,距离扩展目标的neyman-pearson检测器为:
19、
20、式中,re{·}表示取实部运算,γ表示检测门限,由虚警概率决定,上标h表示共轭转置运算;上式成立时,判决存在目标,反之判决不存在目标。
21、更进一步地,利用taylor级数展开对neyman-pearson检测器进行线性化处理,得到其线性近似形式:
22、
23、式中,ξ为依赖于taylor级数展开点的向量;表示接收滤波器权矢量,则线性化后的检测器表示为:
24、re{why}≥γ。
25、更进一步地,在h0假设下,检测器re{why}服从期望为0,方差为的实高斯分布,虚警概率pfa的表达式为:
26、
27、在h1假设下,检测器re{why}服从期望为re{whst0},方差为的实高斯分布,检测概率pd的表达式为:
28、
29、根据neyman-pearson准则,检测门限γ的选取使得虚警概率pfa为确定值;
30、检测门限γ与虚警概率pfa的关系式如下:
31、
32、式中,erf-1(·)表示高斯误差函数的反函数;检测概率pd与虚警概率pfa的关系式如下:
33、
34、上式表明,在虚警概率pfa一定的情况下,检测器的检测性能依赖于接收滤波器权矢量w。
35、更进一步地,以接收滤波器权矢量w为决策变量将检测概率pd最大化,优化模型为:
36、
37、式中,α=erf-1(1-2pfa)表示受到虚警概率pfa影响的尺度因子,代换变量||·||2表示欧几里得空间的2范数。
38、更进一步地,使用迭代的方法求解所述优化模型,记v(k)表示第k次迭代时的优化变量,具体求解步骤如下:
39、s41:初始化迭代次数k=0和迭代变量v(0),使得||v(0)||2=1;
40、s42:更新v(k+1)
41、
42、式中,
43、
44、m=(srtsh+rn)-1/2
45、β(k)表示第k次迭代时的方向向量,m表示srtsh+rn逆矩阵的平方根矩阵,λ表示矩阵mhrnm的最大特征值,i为单位矩阵;
46、s43:将v(k+1)作为优化模型中的变量v代入优化模型计算目标函数值;
47、s44:判断式优化模型中的目标函数是否收敛,如果收敛,计算w=(srtsh+rn)-1/2v(k+1)得到优化后的接收滤波器权矢量w并构造检测器;如果不收敛,令k=k+1,返回s42。
48、本发明能够在保持虚警概率恒定的条件下,通过优化滤波器权系数,最大化目标的检测概率,并且所设计的检测器具有线性结构,便于实现。
- 还没有人留言评论。精彩留言会获得点赞!