一种矢量自适应飞行器前体流场组织方法
本发明属于飞行器前体设计领域,涉及高速进气道进口面的结构设计,具体是一种矢量自适应飞行器前体流场组织方法。
背景技术:
1、进气道向空气喷气发动机提供所需的空气,使迎面流入的高速气流减速,把气流的动能转变为压力能,使空气预压缩,进而使进气道出口流速适应压气机(或风扇)或燃烧室的要求。高超声速前体是高速吸气式空天巡航器的机体与进气道之间的气动过渡段,其作用是对高速来流进行预压缩、排移高速下较厚的附面层、平整机体非均匀流以用于进气道气流捕获等。同时,前体基于各类复杂构型机体而设计,为进气道的布置提供可行性较高的几何型面。
2、现有技术条件下,飞行器的进气道来流方向在吻切面内(攻角)变化时,进气道气动性能仍能一定程度继承基准流场的性能,其非设计点性能偏离度是可控的;而当来流方向跨吻切面方向(侧滑角)变化时,气流经过的流道与基准流场构型完全不同,其非设计点性能偏离度是不可控的。
3、本发明基于“激波+下游已知面→上游未知面”特征线逆向求解原理,原创提出周向旋转吻切面流场组织思路,发展矢量自适应前体的设计方法,采用旋转吻切面思路逐块设计飞行器前体三维复杂型面,实现对于一定的侧滑角变动范围,均能保证进气道激波贴口的矢量自适应特性。
技术实现思路
1、发明目的:本发明针对现有技术中的进气道吻切面设计的不足,提出一种矢量自适应飞行器前体流场组织方法。该组织方法,能够在飞行器进气道吻切面面对较宽入流矢量变化范围,实现前体激波大面积附着于进气道唇口的高流量捕获特性,形成能显著提升机动飞行能力、降低外阻的一体化设计方法。
2、技术方案:一种矢量自适应飞行器前体流场组织方法,包括如下步骤:
3、步骤一、基于进气道前体流场的定解逻辑,将进气道前体进行型面分区:所述进气道前体分为下游型面和上游型面,所述上游型面分为若干上游主动域和若干上游牵连域;
4、依据右手准则,根据型面在飞行器中的位置建立坐标系,其中,坐标原点o为进气道前体的上游型面的前端点;
5、步骤二、确定初始条件:指定来流攻角δp1,侧滑角δy,两者的范围均在∠cmemc1在xoz面的投影角范围内;
6、所述∠cmemc1是指远唇口点与激波轮廓间的夹角,c1~cm为激波附着点,即激波从唇口点进入,沿激波轮廓附着到进气道唇口位置上的各点;em为远唇口点,即距离唇口位置较远的激波发生点;
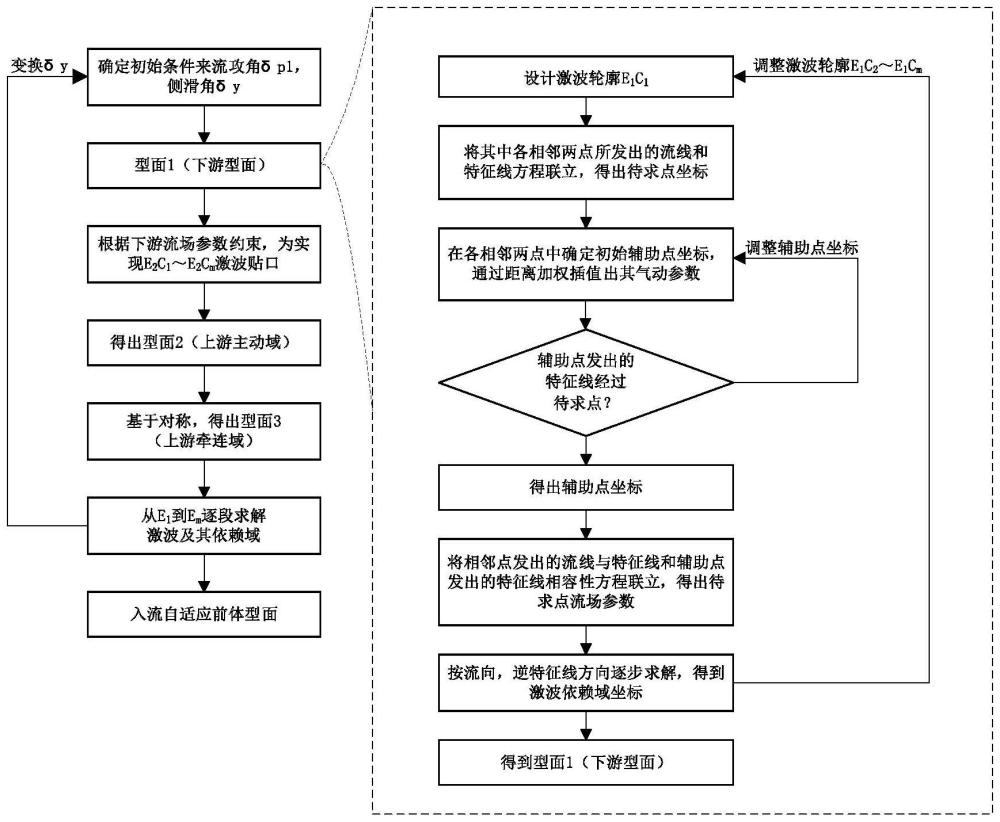
7、步骤三、下游型面反问题设计:
8、以近唇口点e1为激波发生点,c1~cm为激波附着点,设计激波轮廓e1c1~e1cm后,基于特征线逆向求解原理求解得到下游型面;
9、步骤四、上游主动域多约束反问题设计:
10、在下游型面相关条件已知的约束下,给定初始的波后静压,利用带约束条件的特征线逆向求解方法,得到上游型面主动域的初始位置,通过对激波形状的微调,使上游主动域型面部分实现激波e2c1~e2cm贴口,求解出一个上游主动域e1 e1-s e2,其中e1、e2是唇口点即激波发生点,e1-s为e1关于xoy面的对称点;
11、步骤五、基于上游主动域和上游牵连域对称的前提和步骤四求出的上游主动域e1e1-s e2,得到一个上游牵连域e1-so2e2-s,e2-s为e2关于xoy面的对称点,o2是指e1-se2与xoy面的交点;
12、步骤六、按照步骤二至步骤五,从近唇口点e1向远唇口点em沿周向逐段求解激波及其依赖域,对于e1~em中每个点,变换侧滑角δy使该点发出的前体激波附着进气道唇口对应位置,从而设计得到所有的上游主动域和上游牵动域,经过cfd计算检验,得到上游型面的压比分布符合下游型面相关条件约束,且所得出的上游型面可实现激波贴口,从而得出最终的矢量自适应前体型面。
13、进一步的,所述步骤三中,所述下游型面的求解方法具体如下:
14、步骤1)、以近唇口点e1为激波发生点、c1~cm为激波附着点,设计激波轮廓e1c1;
15、步骤2)、将e1c1激波轮廓中的若干点中的各相邻两点所发出的流线和特征线方程联合,得出待求点坐标;
16、步骤3)、在e1c1激波轮廓中的若干点中的各相邻两点中确定初始辅助点坐标,通过距离加权插值出其气动参数;
17、步骤4)、如果初始辅助点发出的特征线不经过待求点,则回到步骤3)、调整初始辅助点坐标;如果初始辅助点发出的特征线经过待求点,则确定初始辅助点的坐标;
18、步骤5)、将e1c1激波轮廓中的若干点中的各相邻两点发出的流线与特征线和初始辅助点发出的特征线相容性方程联立,得出待求点流场参数;
19、步骤6)、按流向,逆特征方向逐步求解,得到激波依赖域坐标;
20、步骤7)、调整激波轮廓为e1c2~e1cm,按照步骤2)至步骤6)进行求解,最终得到下游型面。
21、进一步的,所述步骤四中,下游型面相关条件是指在下游型面、前缘点、唇口点位置、入流矢量和下游型面的速度分布。
22、进一步的,所述步骤三中,待求点坐标求解过程如下:
23、首先设定激波轮廓a1am,联立a3发出的流线、a4发出的逆向特征线方程,求得b3坐标,相关方程如下:
24、
25、式中,r、δ、α、u、v依次为流场高度、气流矢量角、马赫角、初速度、末速度;a1~am为所设定的激波轮廓;a3、a4为激波轮廓中的相邻两点;b3为一个待求点,求得b3坐标可得知其对应的激波依赖域中的d1点坐标。
26、进一步的,所述步骤三中,辅助点t坐标求解过程如下:
27、在a3、a4间任意选取点t,通过距离加权插值出其气动参数,求解t发出的特征线,判断其是否经过b3,继而通过迭代最终求得经过b3的t点坐标。
28、进一步的,所述步骤三中,待求点流场参数的求解过程如下:
29、将经过a3发出的流线、a4与t发出的特征线相容性方程联立,求得b3的流场参数,相关方程如下:
30、
31、式中,ρ、v、p、c、m、θ依次为密度、速度、压力、声速、马赫数、气流速度矢量角,ζ为基准流场常数,ζ=0代表二维流动,ζ=1代表轴对称流动,下标±代表左/右行特征线。
32、进一步的,所述步骤三中,激波依赖域坐标的求解过程如下:
33、按逆流向、逆特征线方向逐步求解,得到激波依赖域a1b1~x1坐标,a1、b1~x1代表的根据轮廓所得到的下游型面点坐标。
34、进一步的,所述步骤四中,上游型面中的上游主动域的求解的过程如下:
35、步骤a、根据点x1的已知坐标、气动参数,即在下游型面已知的情况下,给定初始上游型面的压比分布;
36、步骤b、为满足下游流场的参数约束,即下游型面已知且其速度分布已知的情况下,对激波形状进行微调,根据调整后的激波轮廓,求解上游主动域的待求点坐标、辅助点t坐标、待求点流场参数、激波依赖域坐标,得到初始的上游主动域;
37、步骤c、观察依据初始上游主动域的位置形状,所得出的从前缘点发出的激波是否贴唇口;
38、步骤d、如果从前缘点发出的激波不贴唇口,则回到步骤b,对激波形状进行微调;如果前缘点发出的激波贴唇口,则确认为上游主动域最终解。
39、有益效果:本发明方法设计的矢量自适应飞行器前体型面,能够在面对较宽入流矢量变化范围,有效地实现前体激波大面积附着于进气道唇口的高流量捕获特性,显著提升机动飞行能力、降低外阻。
- 还没有人留言评论。精彩留言会获得点赞!