高城镇化河网全自动水环境监测方法及系统与流程
本发明涉及水文水动力技术,尤其是一种高城镇化河网全自动水环境监测方法及系统。
背景技术:
1、随着城市化进程的加快,城市河网的水环境面临一些挑战。城市河网是城市生态系统的重要组成部分,对于城市的水资源保障、洪水调节、生态修复、景观美化等方面具有重要的作用。为了有效地保护和改善城市河网的水环境,需要对城市河网的水环境进行全面、准确、实时的监测,以获取水环境的基础数据,分析水环境的变化趋势,评价水环境的质量状况,指导水环境的治理和管理。
2、传统的水环境监测方法主要依赖于人工采样和实验室分析,这种方法存在着很多缺点,如监测频率低、监测范围小、监测成本高、监测效率低、监测数据时效性差等。为了克服这些缺点,近年来,高城镇化河网全自动水环境监测方法逐渐引起了国内外的关注和研究。这种方法利用现代信息技术和传感技术,通过布设水环境自动监测站或微站,实现对城市河网的水质、水量、水流、水生态等多个参数的连续、在线、实时的监测,通过无线通信技术,将监测数据实时传输到监测中心,通过大数据分析技术,对监测数据进行处理、分析、评价、预警等,为城市河网的水环境管理提供科学依据和技术支持。
3、尽管目前的全自动水环境监测技术已经取得了一定的进展,但仍然存在一些问题和挑战,包括:监测数据的准确性和可靠性仍需提高。影响数据质量的因素包括监测设备的性能、环境条件的变化以及数据处理算法的准确性等。监测系统的集成性和智能化水平有待进一步提升。数据收集和处理过程中的延迟可能影响决策的时效性。现有技术在生态系统复杂性和生物多样性监测方面仍有待提高。目前的监测系统往往仍需人工干预进行数据分析和决策,缺乏足够的自主判断和响应能力。
4、因此,需要进一步的研发和创新。
技术实现思路
1、发明目的,提供一种高城镇化河网全自动水环境监测方法及系统,以解决现有技术存在的上述问题。
2、技术方案,根据本技术的一个方面,提供一种高城镇化河网全自动水环境监测方法,包括如下步骤:
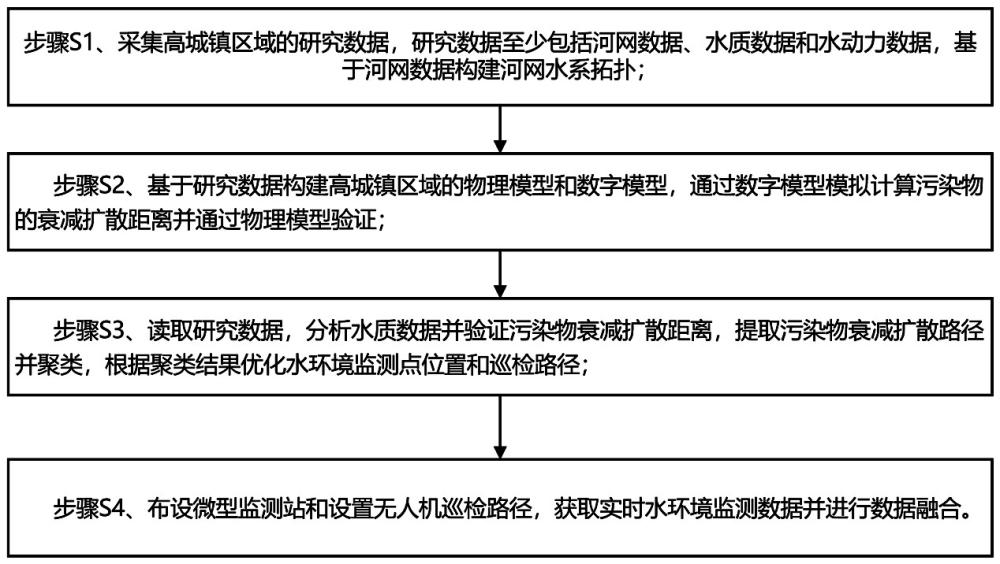
3、步骤s1、采集高城镇区域的研究数据,研究数据至少包括河网数据、水质数据和水动力数据,基于河网数据构建河网水系拓扑;
4、步骤s2、基于研究数据构建高城镇区域的物理模型和数字模型,通过数字模型模拟计算污染物的衰减扩散距离并通过物理模型验证;
5、步骤s3、读取研究数据,分析水质数据并验证污染物衰减扩散距离,提取污染物衰减扩散路径并聚类,根据聚类结果优化水环境监测点位置和巡检路径;
6、步骤s4、布设微型监测站和设置无人机巡检路径,获取实时水环境监测数据并进行数据融合。
7、根据本技术的一个方面,步骤s1进一步包括:
8、步骤s11、读取高城镇区域的dem数据,并采用搭载高分辨率相机和激光雷达的无人机对高城镇区域的河网进行遥感拍摄,获取河流的位置、形态、宽度、长度和分支,修正河网的数字高程模型和正射影像,获得符合标准的河网数据;
9、步骤s12、获取高城镇区域各个河网的水质监测数据,并采用搭载水质传感器和水声传感器的无人船对河流水体进行自主采样和监测,获取河流各个深度的水质参数和水动力参数,水质参数包括温度、ph、溶解氧、电导率、浊度、氨氮、总磷和叶绿素,水动力参数包括流速、水深和水位;
10、步骤s13、对研究数据进行优化和修正,并根据河流的水质和水动力参数对河流的属性进行更新和调整,形成河网水系的基础拓扑框架和动态拓扑数据。
11、根据本技术的一个方面,所述步骤s2进一步为:
12、步骤s21、基于河网水系的动态拓扑数据库,构建高城镇区域的河网水环境的数字模型,包括河流水质模型、河流水动力模型和河流水生态模型,分别描述河流水体的物理、化学和生物过程;
13、步骤s22、采用随机模拟方法生成河网水系拓扑中各点的预定污染浓度的模拟数据;基于河网水环境的数字模型,模拟计算污染物的衰减扩散距离,考虑污染物的来源、性质、浓度、排放量和排放方式,以及河流水体的流速、流量、水深、水温、水质和水生态,得到污染物的衰减扩散曲线和区域;
14、步骤s23、基于相似理论构建预定尺寸缩小的、高城镇区域的河网水环境的物理模型,以用于模拟河流水体的特性和过程;
15、步骤s24、基于河网水环境的物理模型,验证污染物的衰减扩散距离,用不同的污染物材料模拟污染物的排放,观察和测量污染物在物理模型中的衰减扩散过程,与数字模型的结果进行对比和分析。
16、根据本技术的一个方面,所述步骤s3进一步为:
17、步骤s31、读取无人机、无人船和监测站采集的水质数据,对水质数据进行预处理,包括数据清洗、数据校验、数据插补和数据平滑,消除数据的噪声和误差;
18、步骤s32、利用聚类分析和关联分析从水质数据中提取出污染物的特征和规律,并与数字模型和物理模型的结果进行对比和验证,验证污染物衰减扩散距离,评估污染物的衰减扩散距离的准确性和可信度;
19、步骤s33、从污染物的衰减扩散曲线和区域中提取出污染物的衰减扩散路径,并根据衰减扩散路径的长度、方向和分布,将衰减扩散路径进行聚类,形成不同的污染物衰减扩散路径类别;衰减扩散路径是污染物从排放点到达不同水质等级的河段的平均路径;
20、步骤s34、根据聚类结果优化水环境监测点位置和巡检路径,利用数据挖掘和机器学习的方法,根据污染物衰减扩散路径类别的特征和规律,确定水环境监测点的最优位置,使监测点能够覆盖不同的污染物衰减扩散路径类别,同时考虑监测点的数量、分布和成本,使监测点的布设合理和经济;并根据监测点的位置,规划无人机的巡检路径。
21、根据本技术的一个方面,所述步骤s4进一步为:
22、步骤s41、根据水环境监测点的最优位置,布设水环境自动监测站;
23、步骤s42、根据无人机和无人船巡检路径,设置无人机的行驶速度、方向、高度和载荷,以及无人机的模式,使无人机能够按照预设的时间间隔,对监测点进行巡检;无人机和无人船在巡检过程中,对河流水环境进行在线采集,并将数据存储在无人机和无人船的内存中;
24、步骤s43、监测站根据设定的时间间隔,对河流水环境的水质、水量和水生态参数进行自动采集,并将数据存储在监测站的内存中;
25、步骤s44、每个监测站和无人机都根据设定的时间间隔,利用4g、5g或卫星通信技术,将内存中的数据实时或定时传输到云端服务器,供后续的数据处理和分析使用;
26、步骤s45、云端服务器利用数据融合算法,将不同来源的数据进行融合,形成对河流水环境的综合监测和评价结果。
27、根据本技术的一个方面,所述步骤s34包括:
28、步骤s341、根据聚类结果确定水环境监测点的最优位置,利用数据挖掘和机器学习的方法根据污染物衰减扩散路径类别的特征和规律,包括长度、方向、分布和影响范围;选择最能代表不同类别的路径的中心点或关键点,作为水环境监测点的最优位置,使监测点能够覆盖不同的污染物衰减扩散路径类别,同时考虑监测点的数量、分布和成本,使监测点的布设合理和经济;
29、步骤s342、根据监测点的位置规划无人机的巡检路径,利用聚类分析、关联分析和分类分析根据监测点的位置、属性和状态信息,以及无人机和无人船的性能、续航和载荷,设计无人机和无人船的巡检路径,使无人机和无人船能够按照预设的时间间隔,对监测点进行定期或不定期的巡检,获取监测点的实时数据和图像,并通过无线通信技术将数据和图像传输到云端服务器。
30、根据本技术的一个方面,所述步骤s45中的数据融合的过程包括:
31、步骤s451、确定数据融合后可能出现的所有河流水质等级,构成一个有限的互斥的集合;
32、步骤s452、根据数据源的观测结果和专家知识,给每个河流水质等级赋予一个基本概率分配函数;
33、步骤s453、根据数据源之间的相关性和可靠性,给每个河流水质等级赋予一个信度函数和一个似然函数,并作为分配证据,表示对该河流水质等级的支持程度和相似程度;
34、步骤s454、利用ds证据理论的合成规则,将各个数据源的分配证据进行组合,得到一个综合的信度函数和似然函数,根据它们的大小,决定数据融合的最终结果,即选择信度最大或似然最大的河流水质等级作为数据融合的输出。
35、根据本技术的一个方面,所述步骤s4还包括步骤s46、对污染物溯源分析,
36、步骤s461、读取各个站点的水质监测数据,获得污染物的浓度、组成和同位素比值,形成污染物的指纹特征;
37、步骤s462、调取对应污染物的衰减扩散路径数据,计算污染物的传输路径与已知的污染源的海森堡距离,即根据两条曲线或形状之间的最大距离,衡量它们的相似度,越小的海森堡距离表示越高的相似度,分析和确认污染物扩散的时空分布演变过程;
38、步骤s463、根据海森堡距离的大小,确定污染物的最可能的来源和传播路径,即选择海森堡距离最小的污染源作为污染物的溯源结果,同时给出溯源的置信度和误差范围。
39、根据本技术的一个方面,所述步骤s22还包括:
40、步骤s221、获取水动力数据,并进行聚类,提取各个典型时期内各个时段的典型水动力周期;
41、步骤s222、针对每个典型水动力周期,对模拟参数进行预处理,形成模拟数据集;
42、步骤s223、依序采用模拟数据集,模拟计算污染物衰减扩散路径,形成各个典型时期内各个时段下的污染物衰减扩散路径。
43、根据本技术的另一个方面,提供一种高城镇化河网全自动水环境监测系统,其特征在于,包括:
44、至少一个处理器;以及
45、与至少一个所述处理器通信连接的存储器;其中,
46、所述存储器存储有可被所述处理器执行的指令,所述指令用于被所述处理器执行以实现上述任一项技术方案所述的高城镇化河网全自动水环境监测方法。
47、有益效果,通过物理模型和数字模型相结合,模拟计算污染物的衰减扩散距离,并通过实验验证模拟结果的准确性,减少布点,同时通过检测点的时空拓扑关系来相互验证,提高了效率和准确性。根据污染物的衰减扩散路径进行聚类,优化了水环境监测点的位置和无人机的巡检路径,提高了监测的覆盖率和灵敏度;采用数据融合算法,将不同来源的数据进行融合,形成对河流水环境的综合监测和评价结果,提高了数据的可靠性和有效性;采用了海森堡距离的方法,对污染物进行溯源分析,确定污染物的最可能的来源和传播路径,为水环境治理提供了参考。相关技术效果,将在下文结合具体实施例进行描述。
- 还没有人留言评论。精彩留言会获得点赞!