一种基于两次定向的DEM数据生产处理方法与流程
本发明涉及遥感,具体涉及一种测绘行业dem数据生产处理方法,尤其涉及一种改变传统dem数据生产流程的基于两次定向的dem数据生产处理方法。
背景技术:
1、测绘地理信息数据是国家数字化建设的重要组成部分,为国家战略性数字资产。数字高程模型(dem),是用有序数列来表示地面形态的高程信息,是地面形态的数字化表达。dem作为地理信息产业应用产品之一,其已广泛应用于国家各行各业,服务国民经济建设。
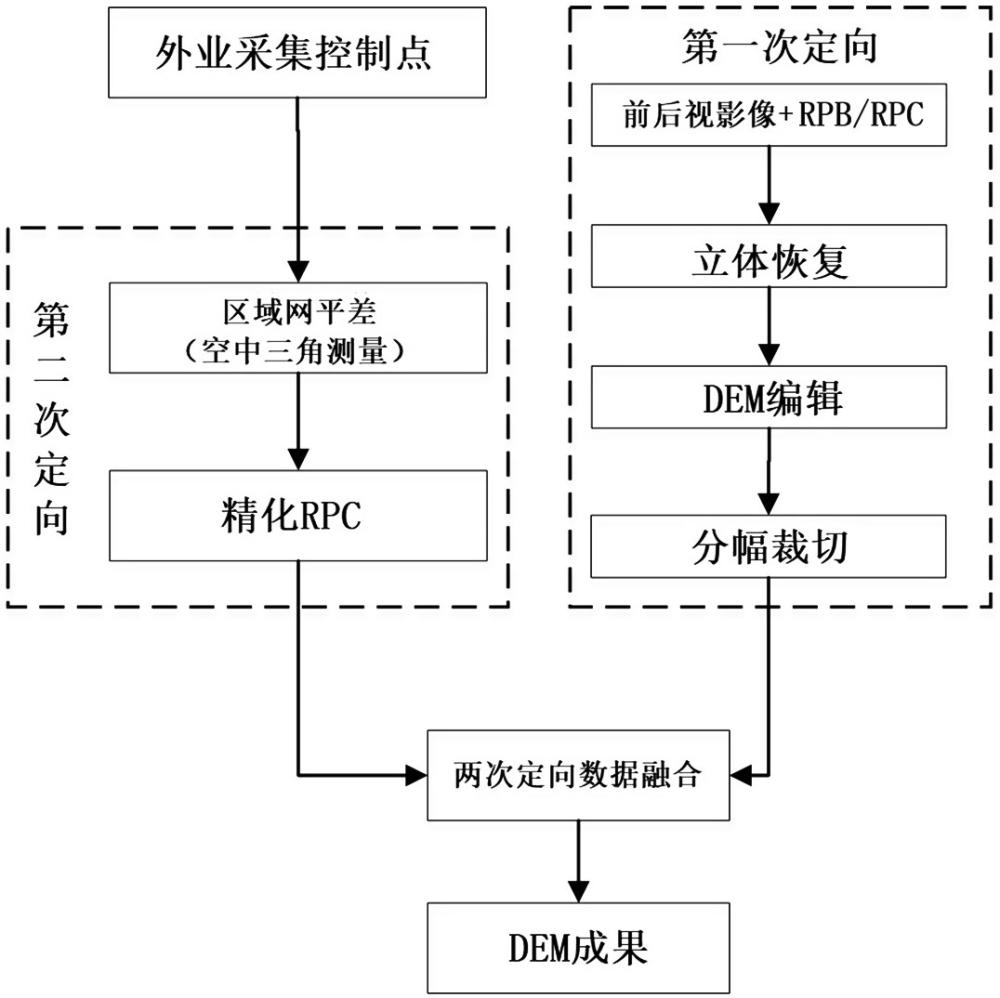
2、传统的dem制作方法如下:①外业采集控制点②控制点采集与区域网平差③立体恢复④dem编辑⑤分幅裁切等步骤处理输出成果。制作步骤为流水线作业的形式,内业需在外业完成后才能跟进处理。在大范围数据处理时外业制约了内业处理的进度,进而影响了项目的整体进度,增加项目成本。
3、近年来,国内外学者和生产企业在dem制作方法流程优化方面做了很多尝试和研究,但大多基于传统流程在算法层面或局部编辑环节的改进。如:全数字摄影测量系统geoway-dps,目的通过自动化减少人工参与的强度以提升效率,但未改变dem作业流程模式。随着现代遥感科学与技术的迅速发展,传统的dem作业方式也难以满足生产dem产品的需要。
4、中国专利文献cn 103383773 a公开了一种动态提取图像控制点的遥感图像自动几何纠正的系统框架和方法,该框架包含一个区域级参考图像集和一个遥感图像自动几何纠正的执行模块。自动几何纠正的执行模块主要包括四个步骤:利用待纠正图像的四个角点坐标信息和系统校正误差的估算值,提取与待纠正图像地理范围基本重合的参考图像与dem,提取的参考图像作为控制图像,dem数据用于正射纠正;将控制图像与待纠正图像进行自动匹配,获得控制点;基于控制点建立待纠正图像和控制图像之间的纠正模型,对图像进行纠正;再次利用图像自动匹配方法将纠正后的图像与控制图像进行自动配准,利用匹配的控制点自动计算相对纠正误差。该技术方案中主要利用已有资料库作为参考dem进行正射校正,但已有资料并不能保证时效性和精度,再者发明并未对dem制作整体流程分析,只是对正射校正内业刺点环节的自动化,也未考虑gcp控制点外业采集步骤,不能实现内外业同步作业。
5、中国专利文献cn 104457710 a公开了一种基于非量测数码相机的数字摄影测量方法,包括如下步骤:直接利用非量测数码相机获取的原始影像进行自检校空中三角测量,得到加密点基于原始影像的像方坐标、物方坐标、每张相片的外方位元素和非量测数码相机自检校模型参数;利用空中三角测量成果进行影像匹配生产dem数据;利用dem数据进行影像数字微分纠正,生产dom数据;根据空中三角测量成果对原始影像进行校正,得到校正后的影像;基于校正后的影像和外方位元素建立立体模型,基于立体模型生产dlg数据。该技术方案其主要对数码相机影像利用自检校空中三角测量成果生产dem数据和dom数据,其dem生产流程方法并未改变。
6、中国专利文献cn 113358091 a公开了一种利用三线阵立体卫星影像生产数字高程模型方法,包括:将生产区域内多度重叠覆盖的遥感卫星三线阵立体影像构建平差区域网并完成区域网平差,实现所有影像的高精度定向;随后根据任意两张影像之间重叠率和同名光线交会角等指标值,将多度重叠覆盖的三线阵立体影像构建多对双像立体影像,并分别采用影像密集匹配算法提取数字高程模型dem;最后根据双像立体影像的交会角度、相对精度,以及构成影像的时相差异等指标,计算各个双像立体影像的权重值,并基于该权重值,将区域内所有的双像立体影像提取的dem进行加权融合,生成最终dem产品。但该技术方案重点利用多度重叠覆盖影像进行dem生产,提升了细节匹配质量,但其dem编辑工作也是在加入控制点平差后才能进行作业,也不能使内业外业的同步进行,且整体dem数据生产处理流程并未改变。
7、因此,有必要提供一种基于两次定向的dem数据生产处理方法,以满足在内业、外业不同步的情况下dem数据处理问题,用以缩短工期。
技术实现思路
1、本发明要解决的技术问题是提供一种基于两次定向的dem数据生产处理方法,旨在满足在内业、外业不同步的情况下dem数据处理问题,提升作业效率,缩短项目工期。
2、为了解决上述技术问题,本发明采用的技术方案是:该基于两次定向的dem数据生产处理方法,具体包括以下步骤:
3、s1第一次定向并采集控制点:利用rpc/rpb自由网模型,对dem数据进行采集并处理,输出第一次定向dem成果数据,同时外业采集控制点信息;
4、s2第二次定向:利用外业控制点信息,生成精化后rpc模型,即第二次定向成果数据;
5、s3生成最终结果:将第一次定向dem成果数据和第二次定向成果数据作为输入,经过两次定向工具软件处理后生成最终dem成果数据。
6、优选地,所述步骤s1的具体步骤为:
7、s11第一次定向:利用前视影像、后视影像和rpc/rpb自由网模型,通过立体恢复,对dem数据进行采集编辑,并进行分幅裁切,输出第一次定向dem成果数据;
8、s12外业采集控制点:根据作业区资料布设控制点,利用gps测量站采集控制点坐标,获得控制点成果文件。
9、优选地,所述步骤s11中的所述立体恢复是利用virtuozo软件,选择前视影像、后视影像和rpc/rpb自由网模型,通过立体眼镜恢复立体模型;所述步骤s11中对dem数据进行编辑是利用virtuozo软件的编辑工具进行交互编辑或自动化编辑处理,获得dem编辑结果;所述分幅裁切是利用virtuozo软件的分幅工具,将dem编辑结果按照任意设定大小进行分块裁切,且块与块之间至少保证1个格网分辨率的重叠,输出第一次定向dem成果数据。
10、优选地,所述步骤s12中布设控制点要求选取地物点,且控制点均匀分布整个测区;控制点成果文件包括点之记、远近景照片和控制点坐标成果。
11、优选地,所述步骤s2中首先将前视影像和后视影像及rpc/rpb自由网模型作为输入,通过连接点匹配,进行初次区域网平差计算;然后利用获得的控制点成果文件,通过控制点判刺量测,再进行整体区域网平差计算(即空中三角测量),平差计算利用socet-gxp软件,在限差满足精度要求后,生成精化后rpc模型,即第二次定向成果数据。
12、优选地,所述步骤s3的具体步骤为:
13、s31dem匹配:通过rpc/rpb自由网模型和第一次定向dem成果数据,通过有理函数单片正算,得到前视影像和后视影像对应的像点坐标,即同名像点;
14、s32点云生成:获得的所述同名像点和第二次定向成果数据,利用前方交会计算新的地面点坐标;
15、s33插值栅格化:利用步骤s32中获取的地面点坐标,采用反距离权重插值方法根据精化后rpc模型得到的离散点即纠正后的地面点坐标,再进行内插得到待定点的高程值,输出栅格化后dem栅格影像。
16、优选地,所述步骤s31的具体步骤为:
17、s311:首先读取第一次定向dem成果数据,获取地面点坐标();
18、s312:以获取的地面点坐标()为定位点,通过有理函数模型分别计算前视影像和后视影像对应的像点坐标,即同名像点,其中有理函数公式为:
19、;
20、其中的各多项式系数 a ij(i=1,2,3,4;j=1,2,……20),即为rpc自由网模型中参数;
21、s313:将像点坐标表示为以地面点大地经度、大地纬度和大地高度坐标为自变量的多项式的比值,公式为:
22、;
23、其中,像点坐标()表示和地面点坐标()均为经过平移和缩放后的正则化坐标,其中正则化的关系式为:
24、;
25、其中,(、、、、)为正则化平移参数,(、、、、)为正则化比例参数。所述正则化比例参数对每一幅影像都是特定的。
26、优选地,所述步骤s32的具体步骤为:
27、s321:利用第二次定向成果数据和得到的同名像点,采用有理函数模型前方交会,有理函数在前方交会的具体模型方程为:
28、;
29、其中,( r, c)为像点坐标,、分别表示正则化比例系数;、分别表示正则化平移参数;
30、将r和c两个方程按照泰勒公式展开到一次项,得到以下方程:
31、;
32、根据前视影像和后视影像同名像点坐标,列出以下4个误差方程:
33、;
34、即:;
35、根据最小二乘原理,解算出改正后地面点坐标的改正数为:
36、;
37、当时停止迭代计算,为迭代限差;最终交会出地面点坐标(),具体为:
38、;
39、s322:解算纠正后的地面点坐标,具体为使用地面点的初始值迭代计算,取前视影像和后视影像正则化平移参数平均值作为初始值,计算公式为:
40、;
41、其中,、、、、、对应前视影像和后视影像精化后rpc模型的正则化比例系数。
42、优选地,所述步骤s33中利用地面点坐标计算反距离权重插值得到待定点的高程值的公式为:
43、;
44、其中, z 0代表估算点的高程值; z i为插值要素在第i点的实际测量高程值; m i为计算过程中的各已知点的权重值, n为参与插值的点数;
45、权重值的计算公式为:
46、;
47、式中, p为幂指数; d i为第i点和待插值点之间的距离。待插值点在内插点值的计算过程中其每个已知点所占的权重受幂指数影响,即随着已知采样点与待插值点之间距离的增加,采样点对待插值点影响的权重逐渐减少,具有很高的效率,计算量也比较小。
48、与现有技术相比,本发明具有的有益效果为:
49、(1)将传统dem制作方法先外业后内业串联作业的方式,转变为内外业同步进行的方式,使得dem编辑工作可以在区域网平差计算结果出来之前作业,有效的提升作业的效率,缩短了dem制作周期;
50、(2)两次定向工具软件是将外业和内业结合的关键环节,生成的dem成果满足1:50000、1:25000、1:10000制图精度要求;
51、(3)两次定向工具软件处理生成dem成果,前视影像和后视影像同名像点匹配利用了一次定向dem成果通过有理函数正算计算同名像点,区别于常规dem数据处理中利用的sift等匹配算法,提升了计算的效率。
- 还没有人留言评论。精彩留言会获得点赞!