一种结构化道路机动车微观交通行为的建模方法
本公开涉及自动驾驶仿真,具体涉及一种结构化道路机动车微观行为的建模方法。
背景技术:
1、自动驾驶技术是未来交通的核心发展趋势,而自动驾驶仿真技术则成为推动自动驾驶汽车研发和测试的关键技术,为其提供高保真的虚拟仿真环境。然而,现有的自动驾驶仿真平台,如sumo、carla、vissim等,其背景交通流生成基于规则的逻辑框架,将机动车之间的交互简化为跟驰、换道、超车等基本行为,对机动车冲突过程仅通过减速或安全间距检测规避。这导致机动车驾驶行为固定,交互模式简单,仅能生成简单的交通流,而对于偏离道路、速度波动等主动控制能力不足。在真实的城市快速路和高速路等多车道场景下,机动车的驾驶行为存在一定的差异,特别是在偏离道路中心线和行驶速度波动方面。因此,迫切需要为自动驾驶仿真软件构建一种能够准确描述城市结构化道路机动车微观交通行为并具有拓展性的仿真模型,为自动驾驶汽车提供真实而丰富的道路交通环境,满足自动驾驶汽车决策控制算法在训练和测试环境中的真实性需求。这对于加速自动驾驶技术的实际应用具有重要意义。
技术实现思路
1、本公开旨在至少解决现有技术中存在的技术问题之一。
2、为此,本公开提供的一种结构化道路机动车微观行为的建模方法,专注于结构化道路车辆。通过设计符合人类认知的通用框架,将目标路径选择和路径跟踪避障解耦,先选择目标路径,然后利用在线路径跟踪避障算法在考虑周围交通参与者安全约束的情况下跟踪目标路径。其目标是为自动驾驶汽车创造真实而丰富多样的道路交通环境,以满足其训练和仿真测试的真实性需求。
3、为实现上述目的,本公开采用以下技术方案:
4、本公开第一方面提供的一种结构化道路机动车微观交通行为的建模方法,包括以下步骤:
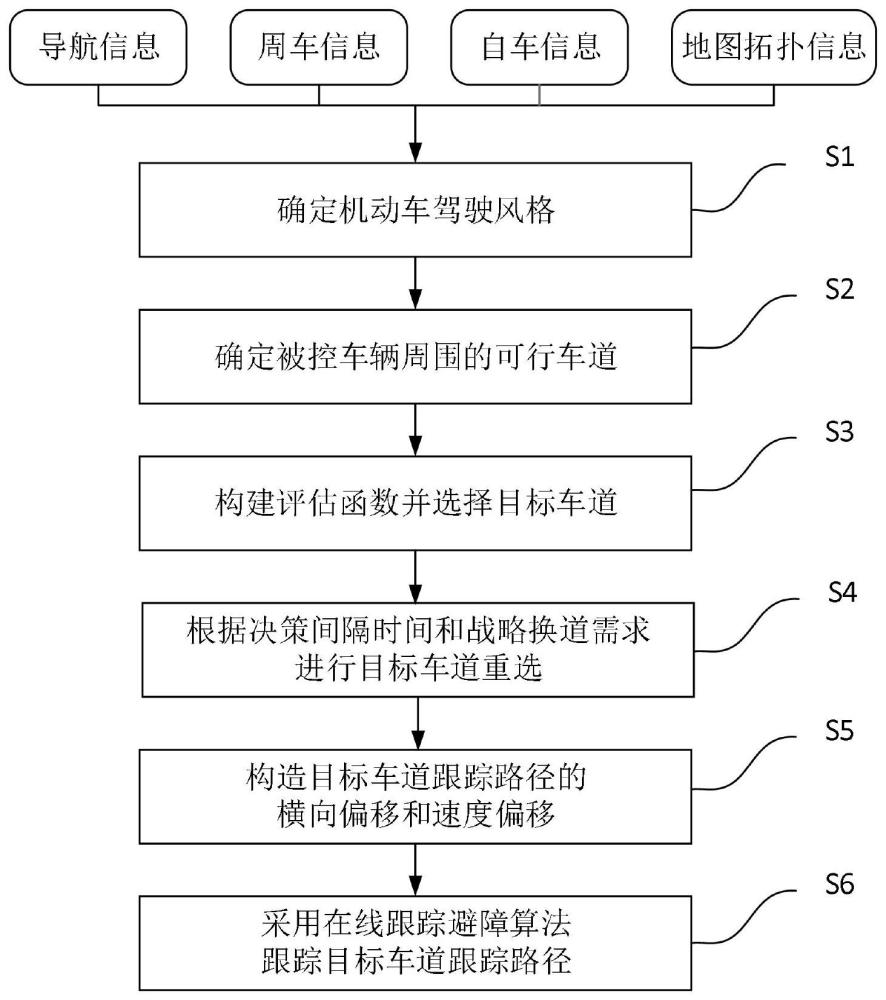
5、s1,确定机动车的驾驶风格,所述驾驶风格根据概率采样产生,包括谨慎型、普通型和激进型三种;
6、s2,根据被控机动车所在车道信息、导航路径信息和道路拓扑关系筛选出被控机动车最多通过一次换道可达的车道作为可行车道,在所述可行车道的中心线离散点基础上增加各离散点的期望速度和期望朝向角形成与所述可行车道对应的可行路径,由所述可行车道和所述可行路径分别构建可行车道集合和可行路径集合;
7、s3,构建考虑通行效率、安全性、经济性、舒适性、合规性和战略换道需求多个维度的评估函数,根据所述评估函数计算所述可行路径的评估值,以此选择被控机动车的目标车道;
8、s4,依据被控机动车至路口的距离d与战略换道距离阈值dst,base的关系设定决策间隔时间,当d<dst,base时,依据驾驶风格设定决策间隔时间,驾驶风格越激进,决策间隔时间越短,驾驶风格越谨慎,决策间隔时间越长,当d≥dst,base时,将决策间隔时间设定为仿真步长;若当前时刻至完成上一次换道时刻的间隔在决策间隔时间内,则不进行目标车道重选,若当前时刻至完成上一次换道时刻的间隔超过决策间隔时间,则依据所述评估函数计算的各可行路径的评估值重选目标车道;
9、s5,以所述目标车道的车道中心线为跟踪路径,考虑驾驶风格,对被控机动车的横向位置和期望速度进行随机采样,根据采样结果设置跟踪路径的偏置,形成在线跟踪避障算法的跟踪路径;
10、s6,考虑被控机动车周围交通参与者的安全约束和道路边界约束,利用在线跟踪避障算法计算下一时刻被控机动车的最优控制量。
11、在一些实施例中,所述驾驶风格用激进系数ρ表征,ρ∈[0.1,1],当0.1≤ρ≤0.3时认为驾驶风格为谨慎型,当0.3<ρ≤0.7时认为驾驶风格为普通型,当0.7<ρ≤1时认为驾驶风格为激进型。
12、在一些实施例中,设第i条可行路径的评估函数为ji,表达式如下:
13、ji=c1jtraffic,i+c2jsafety,i+c3jenergy,i+c4jcomfort,i+c5jcompliance,i+c6jstrategy,i
14、其中,
15、c1表示通行效率权重系数,c2表示安全性权重系数,c3表示经济性权重系数,c4表示舒适性权重系数,c5表示合规性权重系数,c6表示战略换道权重系数;远离路口时,c1和c2应大于其他权重系数,路口附近时,c6最大,c1和c2应大于剩余3个权重系数,且驾驶风格越激进时,c1越大、c2越小;
16、jtraffic,i表示第i条可行路径的通行效率评估值,用被控机动车横向平移至第i条可行车道的最大期望速度或者采用车辆跟驰模型计算得到的速度或加速度进行表征;
17、jsafety,i表示第i条可行路径的安全性评估值,用于评估被控机动车由当前所在车道横向平移至第i条可行车道的安全性,用经过归一化处理的被控机动车在第i条车道下的风险值表征;
18、jenergy,i表示第i条可行路径的经济性评估值,用于评估被控机动车由当前所在车道横向平移至第i条可行车道后的实时经济性;
19、jcomfort,i表示第i条可行路径的舒适性评估值,舒适性与被控机动车的纵向加速度、横向加速度、横摆加速度以及纵向加加速度有关;
20、jcompliance,i表示第i条可行路径的合规性评估值,用于表征被控机动车由当前所在车道换道至第i条可行车道时的违章扣分情况;
21、jstrategy,i表示第i条可行路径的战略换道评估值,所述战略换道指根据导航信息,在被控机动车进入路口不可变道区域前变道至属于导航路径的带指向标识的车道或者是被控机动从当前所在车道前方为不可通行的道路尽头时需要换至相邻车道继续导航路线行驶;当被控机动车至路口的距离d小于战略换道距离阈值dst,base时,战略换道评估值jstrategy,i与被控机动车至路口的距离d成反比,最大值为1;当评估第i条可行车道,且该第i条可行车道为战略换道目标车道时,即属于导航路径中的车道时,战略换道评估值为1,其余可行车道的战略换道值为0。
22、在一些实施例中,根据所述评估函数计算得到的各可行路径的评估值后,根据每条可行路径的评估值大小设置相应的选择概率,将选择概率最大的可行路径对应的可行车道作为目标车道。
23、在一些实施例中,设所述决策间隔时间为t,按照以下公式设定:
24、
25、其中,ρ为表示驾驶风格的激进系数,ρ∈[0.1,1],ρ越大,则驾驶风格越激进;δt为仿真步长。
26、在一些实施例中,步骤s4中,当需要重选目标车道时,根据所述评估函数计算得到的各可行路径的评估值后,根据每条可行路径的评估值大小设置相应的选择概率,将选择概率最大的可行路径对应的可行车道作为新的目标车道;
27、对于需要重选目标车道且d≤dst,base的情况,所述评估函数中战略换道需求起主要作用。
28、在一些实施例中,所述跟踪路径的偏置包括跟踪路径的横向位移偏置ybias和最大纵向期望速度偏置vbias,所述跟踪路径的横向位移偏置ybias服从以cy为均值、σy为标准差的高斯分布,所述跟踪路径最大纵向期望速度偏置值vbias服从以ρ·cv为均值、σv为标准差的高斯分布,其中,cy为驾驶员偏离道路中心线的偏好值,cv为驾驶员的变速偏好值,ρ为表示驾驶风格的激进系数,ρ∈[0.1,1],ρ越大,则驾驶风格越激进。
29、在一些实施例中,步骤s6中,所述在线跟踪避障算法的超参数与驾驶风格相关,驾驶风格越激进,则设置更为激进的在线路径跟踪算法的超参数组合,体现为在线路径跟踪避障算法输出更大的纵向加速度和更大的方向盘转角。
30、本公开第二方面提供的一种根据本公开第一方面任一实施例所述建模方法的建模装置,包括:
31、第一模块,用于确定机动车的驾驶风格,所述驾驶风格根据概率采样产生,包括谨慎型、普通型和激进型三种;
32、第二模块,用于根据被控机动车所在车道信息、导航路径信息和道路拓扑关系筛选出被控机动车最多通过一次换道可达的车道作为可行车道,在所述可行车道的中心线离散点基础上增加各离散点的期望速度和期望朝向角形成与所述可行车道对应的可行路径,由所述可行车道和所述可行路径分别构建可行车道集合和可行路径集合;
33、第三模块,用于构建考虑通行效率、安全性、经济性、舒适性、合规性和战略换道需求多个维度的评估函数,根据所述评估函数计算所述可行路径的评估值,以此选择被控机动车的目标车道;
34、第四模块,用于依据被控机动车至路口的距离d与战略换道距离阈值dst,base的关系设定决策间隔时间,当d<dst,base时,依据驾驶风格设定决策间隔时间,驾驶风格越激进,决策间隔时间越短,驾驶风格越谨慎,决策间隔时间越长,当d≥dst,base时,将决策间隔时间设定为仿真步长;若当前时刻至完成上一次换道时刻的间隔在决策间隔时间内,则不进行目标车道重选,若当前时刻至完成上一次换道时刻的间隔超过决策间隔时间,则依据所述评估函数计算的各可行路径的评估值重选目标车道;
35、第五模块,用于以所述目标车道的车道中心线为跟踪路径,考虑驾驶风格,对被控机动车的横向位置和期望速度进行随机采样,根据采样结果设置跟踪路径的偏置,形成在线跟踪避障算法的跟踪路径;
36、第六模块,用于考虑被控机动车周围交通参与者的安全约束和道路边界约束,利用在线跟踪避障算法计算下一时刻被控机动车的最优控制量。
37、本公开第三方面提供的一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行根据本公开第一方面任一实施例所述的建模方法。
38、本公开的特点及有益效果:
39、本公开提出的一种结构化道路机动车微观交通行为的建模方法,其特点在于基于人类的认知过程,与传统的交通流领域中的模型相比,整体逻辑架构清晰明了,易于拓展,具体体现在以下方面:其一,将目标路径选择和路径跟踪避障解耦,通过对目标路径的车道中心线横向位置和期望速度进行偏置,能够实现差异化的偏离道路中心线和期望速度的驾驶行为。其二,采用在线实时的路径跟踪避障算法,综合考虑其他周车的安全边界约束、道路边界约束和车辆动力学。与纯粹的跟踪算法不同,这使得模型能够在复杂动态的交通环境中与周围交通参与者进行实时交互,从而描述机动车的运动情况,更符合真实交通场景。
- 还没有人留言评论。精彩留言会获得点赞!