一种基于无人机的水库巡检方法及系统与流程
本发明属于图像处理,尤其涉及一种基于无人机的水库巡检方法及系统。
背景技术:
1、水库巡检主要是针对目标水域进行巡逻,从而对水域边缘的异常情况进行识别。一般而言,水库巡检的过程一般由人工完成,人工驾驶巡逻船进行巡逻作业,现有技术也有采用无人机进行巡逻的,无人机在人工控制下在水库上方飞行,从而将实时画面回传至后台,其实质还是人工巡检。
2、现有技术提供的巡检方式需要人工完成对巡检画面的甄别,对于大水域而言,无人机的巡检时间较长,通过人工进行逐个查看效率低,而且容易出现遗漏的情况,效率也较低。
技术实现思路
1、本发明的目的在于提供一种基于无人机的水库巡检方法,旨在解决无人机的巡检时间较长,通过人工进行逐个查看效率低,而且容易出现遗漏的情况,效率也较低的问题。
2、本发明是这样实现的,一种基于无人机的水库巡检方法,所述方法包括:
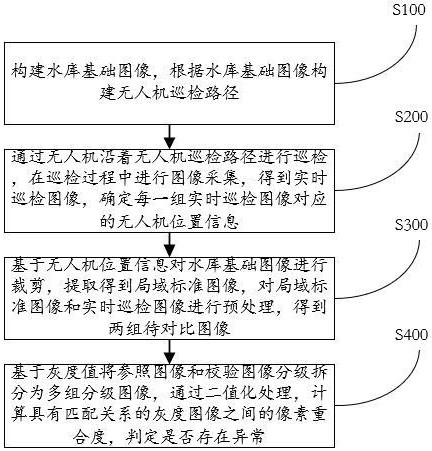
3、构建水库基础图像,根据水库基础图像构建无人机巡检路径,所述无人机巡检路径包含多个巡检节点,巡检节点将无人机巡检路径分割为多个局部路径;
4、通过无人机沿着无人机巡检路径进行巡检,在巡检过程中进行图像采集,得到实时巡检图像,确定每一组实时巡检图像对应的无人机位置信息;
5、基于无人机位置信息对水库基础图像进行裁剪,提取得到局域标准图像,对局域标准图像和实时巡检图像进行预处理,得到两组待对比图像,两组所述待对比图像分别为参照图像和校验图像;
6、基于灰度值将参照图像和校验图像分级拆分为多组分级图像,通过二值化处理,计算具有匹配关系的灰度图像之间的像素重合度,判定是否存在异常。
7、优选的,所述通过无人机沿着无人机巡检路径进行巡检,在巡检过程中进行图像采集,得到实时巡检图像,确定每一组实时巡检图像对应的无人机位置信息的步骤,具体包括:
8、基于无人机巡检路径进行巡检,按照预设时间间隔进行图像采集,得到实时巡检图像;
9、在每得到一组实时巡检图像时,记录对应的无人机位置信息,所述无人机位置信息包括坐标信息和方向信息;
10、在无人机经过巡检节点时,对巡检路径进行重新规划。
11、优选的,所述基于无人机位置信息对水库基础图像进行裁剪,提取得到局域标准图像,对局域标准图像和实时巡检图像进行预处理,得到两组待对比图像的步骤,具体包括:
12、根据无人机位置信息确定裁剪中心点,根据实时巡检图像确定裁剪区域尺寸;
13、根据无人机位置信息对裁剪区域进行调整,通过裁剪得到局域标准图像;
14、对局域标准图像和实时巡检图像同步进行灰度处理,将其转化为参照图像和校验图像。
15、优选的,所述基于灰度值将参照图像和校验图像分级拆分为多组分级图像,通过二值化处理,计算具有匹配关系的灰度图像之间的像素重合度,判定是否存在异常的步骤,具体包括:
16、对参照图像和校验图像进行灰度值统计,基于不同灰度值对应的像素数量确定分级区间,根据分级区间进行拆分,得到多组分级图像;
17、对分级图像进行配对,对每一对灰度图像进行同步二值化处理,得到二值图像组;
18、计算每一组二值图像组内不同像素之间的重合数量,并计算像素重合度,通过比较像素重合度和预设值,判定该监测区域是否存在异常。
19、优选的,进行灰度处理的步骤,具体包括:将图像分解为三组通道图像,基于通道图像中色彩值进行灰度化转换,得到三组预处理图像,计算三组预处理图像中各个像素点与周围像素点之间的总差值,确定合成灰度像素,基于合成灰度像素生成灰度图像,总差值的最大值<mi>p</mi><mi>=</mi><mi>max</mi><mi>[</mi><mstyle displaystyle="false"><munderover><mo>∑</mo><mrow><mi>i</mi><mi>=1</mi></mrow><mn>8</mn></munderover><mrow><msub><mrow><mi>|</mi><mi>gr</mi></mrow><mn>0</mn></msub><mi>-</mi><msub><mi>gr</mi><mi>i</mi></msub><mi>|</mi></mrow></mstyle><mi>,</mi><mstyle displaystyle="false"><munderover><mo>∑</mo><mrow><mi>i</mi><mi>=1</mi></mrow><mn>8</mn></munderover><mrow><msub><mrow><mi>|</mi><mi>gg</mi></mrow><mn>0</mn></msub><mi>-</mi><msub><mi>gg</mi><mi>i</mi></msub><mi>|</mi></mrow></mstyle><mi>,</mi><mstyle displaystyle="false"><munderover><mo>∑</mo><mrow><mi>i</mi><mi>=1</mi></mrow><mn>8</mn></munderover><mrow><msub><mrow><mi>|</mi><mi>gb</mi></mrow><mn>0</mn></msub><mi>-</mi><msub><mi>gb</mi><mi>i</mi></msub><mi>|</mi></mrow></mstyle><mi>]</mi>,其中,为红色通道对应的预处理图像中像素的灰度值,为绿色通道对应的预处理图像中像素的灰度值,为蓝色通道对应的预处理图像中像素的灰度值。
20、本发明的另一目的在于提供一种基于无人机的水库巡检系统,所述系统包括:
21、巡检路径构建模块,用于构建水库基础图像,根据水库基础图像构建无人机巡检路径,所述无人机巡检路径包含多个巡检节点,巡检节点将无人机巡检路径分割为多个局部路径;
22、图像采集模块,用于通过无人机沿着无人机巡检路径进行巡检,在巡检过程中进行图像采集,得到实时巡检图像,确定每一组实时巡检图像对应的无人机位置信息;
23、图像预处理模块,用于基于无人机位置信息对水库基础图像进行裁剪,提取得到局域标准图像,对局域标准图像和实时巡检图像进行预处理,得到两组待对比图像,两组所述待对比图像分别为参照图像和校验图像;
24、异常识别模块,用于基于灰度值将参照图像和校验图像分级拆分为多组分级图像,通过二值化处理,计算具有匹配关系的灰度图像之间的像素重合度,判定是否存在异常。
25、优选的,所述图像采集模块包括:
26、图像采集单元,用于基于无人机巡检路径进行巡检,按照预设时间间隔进行图像采集,得到实时巡检图像;
27、位置信息记录单元,用于在每得到一组实时巡检图像时,记录对应的无人机位置信息,所述无人机位置信息包括坐标信息和方向信息;
28、路径规划单元,用于在无人机经过巡检节点时,对巡检路径进行重新规划。
29、优选的,所述图像预处理模块包括:
30、裁剪尺寸识别单元,用于根据无人机位置信息确定裁剪中心点,根据实时巡检图像确定裁剪区域尺寸;
31、图像裁剪单元,用于根据无人机位置信息对裁剪区域进行调整,通过裁剪得到局域标准图像;
32、灰度处理单元,用于对局域标准图像和实时巡检图像同步进行灰度处理,将其转化为参照图像和校验图像。
33、优选的,所述异常识别模块包括:
34、图像拆分单元,用于对参照图像和校验图像进行灰度值统计,基于不同灰度值对应的像素数量确定分级区间,根据分级区间进行拆分,得到多组分级图像;
35、二值处理单元,用于对分级图像进行配对,对每一对灰度图像进行同步二值化处理,得到二值图像组;
36、异常判定单元,用于计算每一组二值图像组内不同像素之间的重合数量,并计算像素重合度,通过比较像素重合度和预设值,判定该监测区域是否存在异常。
37、优选的,进行灰度处理的步骤,具体包括:将图像分解为三组通道图像,基于通道图像中色彩值进行灰度化转换,得到三组预处理图像,计算三组预处理图像中各个像素点与周围像素点之间的总差值,确定合成灰度像素,基于合成灰度像素生成灰度图像,总差值的最大值<mi>p</mi><mi>=</mi><mi>max</mi><mi>[</mi><mstyle displaystyle="false"><munderover><mo>∑</mo><mrow><mi>i</mi><mi>=1</mi></mrow><mn>8</mn></munderover><mrow><msub><mrow><mi>|</mi><mi>gr</mi></mrow><mn>0</mn></msub><mi>-</mi><msub><mi>gr</mi><mi>i</mi></msub><mi>|</mi></mrow></mstyle><mi>,</mi><mstyle displaystyle="false"><munderover><mo>∑</mo><mrow><mi>i</mi><mi>=1</mi></mrow><mn>8</mn></munderover><mrow><msub><mrow><mi>|</mi><mi>gg</mi></mrow><mn>0</mn></msub><mi>-</mi><msub><mi>gg</mi><mi>i</mi></msub><mi>|</mi></mrow></mstyle><mi>,</mi><mstyle displaystyle="false"><munderover><mo>∑</mo><mrow><mi>i</mi><mi>=1</mi></mrow><mn>8</mn></munderover><mrow><msub><mrow><mi>|</mi><mi>gb</mi></mrow><mn>0</mn></msub><mi>-</mi><msub><mi>gb</mi><mi>i</mi></msub><mi>|</mi></mrow></mstyle><mi>]</mi>,其中,为红色通道对应的预处理图像中像素的灰度值,为绿色通道对应的预处理图像中像素的灰度值,为蓝色通道对应的预处理图像中像素的灰度值。
38、本发明提供的一种基于无人机的水库巡检方法,通过构建水库基础地图,从而在无人机巡检的过程中,基于无人机的位置进行图像比对,在进行比对时,通过进行灰度处理的方式对图像进行分级拆分,从而形成多组二值化图像最大程度上消除了光线等因素对采集图像的影响,提高了画面变化的识别率,根据识别率对图像进行筛选,筛选出存在异常的图像,以供人工查验,大大提高了巡检速度和巡检有效性。
- 还没有人留言评论。精彩留言会获得点赞!