一种多尺度多量级清水混凝土色差检测设备
本发明属于色差检测,尤其涉及一种多尺度多量级清水混凝土色差检测设备。
背景技术:
1、清水混凝土及其预制构件再浇筑或吊装施工后,无需进行二次装饰施工,极大减少了表面装饰材料的使用,因此是一种环保美观的绿色建材;与普通混凝土相比,清水混凝土以其自然表面作为装饰面,再满足力学和耐久性的同时,更具有高质量的外观,常用于民用领域、公路铁路领域、城市立交领域等。
2、在施工过程中,清水混凝土表面不再进行剔凿、修补和抹灰等工艺,减少了施工现场建筑垃圾的产生,因此,二次装饰工序的淘汰,要求清水混凝土一次施工完成后,表面达到美观整洁效果,且符合建筑设计预期,因此,清水混凝土建筑表观质量验收过程极为重要,清水混凝土表观质量缺陷主要包括色差、裂缝和气泡,而对清水混凝土装饰面的色差控制,影响着建筑外观的整体效果,因此色差是清水混凝土外观控制的一个关键点。
3、依据清水混凝土表观质量检测的现行规范《清水混凝土应用技术规程》jgj169-2009,传统的检测方法根据不同种类的清水混凝土采用不同的检测方法。对于清水混凝土表面气泡,普通清水混凝土要求气泡在混凝土表面的分布均匀且分散,饰面清水混凝土则需要人工测量气泡直径和面积。不规则气泡的直径最大值应小于等于8mm,气泡最深处距离清水混凝土表面应小于等于2mm,每平米的清水混凝土表面所有气泡的面积应小于等于20cm2。对于清水混凝土表面裂缝,要凭借检验者的经验,测量裂缝最宽处尺寸和裂缝总长度。其中,普通清水混凝土的裂缝最宽处要小于等于0.2mm,饰面清水混凝土裂缝总长度要小于等于1000mm。对于清水混凝土表面色差,则要求有经验的检测人员站在距离被观测清水混凝土表面5m的位置,通过人眼观测色差的严重程度。其中,普通清水混凝土要求表面无明显的色差区域,饰面清水混凝土则要求混凝土表面的颜色基本一致且无明显的色差区域。
4、因此,当前的清水混凝土表观质量检测依赖于人工检测。特别是清水混凝土色差验收工作,要求检测人员自身具备较为丰富的清水混凝土色差评价经验。但人工评价方式不仅具有较高的主观性,而且效率较低,无法满足当前建筑工业化和绿色建材的发展需求。
技术实现思路
1、本发明所解决的技术问题在于提供一种多尺度多量级清水混凝土色差检测设备,以解决现有的清水混凝土色差检测效率慢,人工评价主观性强的问题。
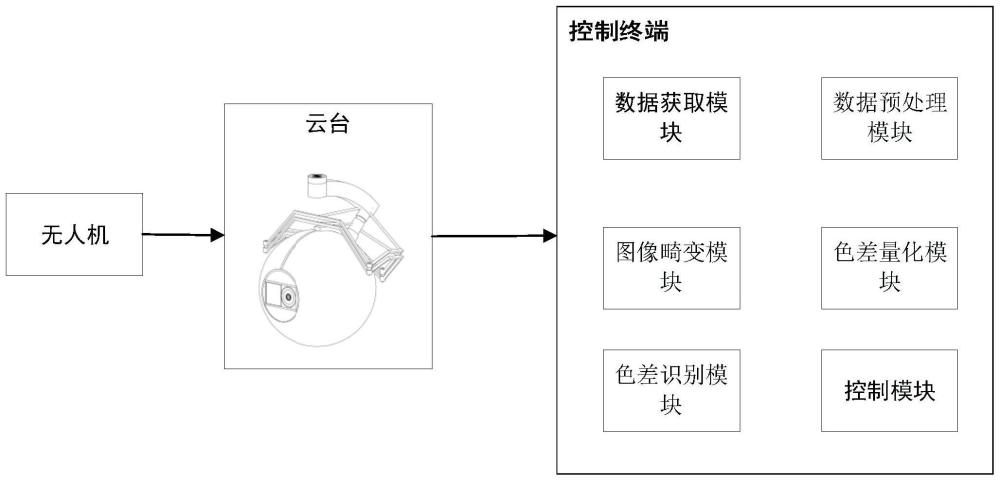
2、本发明提供的基础方案:一种多尺度多量级清水混凝土色差检测设备,包括无人机采集设备,所述无人机采集设备包括无人机、云台和控制终端,所述云台包括云台本体和安装支架,所述控制终端位于云台本体内,所述云台本体上设有活动部,所述安装支架包括无人机安装部、云台安装部和驱动机构,所述云台安装部在驱动机构的控制下与活动部活动连接,所述无人机安装部连接无人机;
3、所述控制终端包括数据获取模块、数据预处理模块、色差识别模块以及色差量化模块,所述数据获取模块用于获取无人机采集设备采集的清水混凝土图像数据,所述数据预处理模块用于将获取的清水混凝土图像数据进行预处理,所述色差识别模块用于根据resnet50语义分割算法构建清水混凝土色差识别模型,将预处理后的清水混凝土图像数据作为清水混凝土色差识别模型的输入参数,输出清水混凝土色差识别模型的识别结果,并对识别结果进行颜色空间转换、直方图均衡化、卡尔曼滤波降噪、图像开操作与闭操作以及图像掩膜操作,生成清水混凝土色差初步量化结果;所述色差量化模块用于根据改进的resnet50语义分割算法构建并训练清水混凝土色差量化模型,将清水混凝土色差初步量化结果作为清水混凝土色差量化模型的输入参数,输出清水混凝土色差量化结果。
4、进一步,所述云台安装部包括活动齿轮,所述活动部包括滑槽,所述滑槽内设有齿链,所述云台安装部与活动部活动连接时,活动齿轮与齿链啮合;所述驱动机构包括驱动电机,所述驱动电机驱动活动齿轮转动;
5、所述云台上还包括摄像头,所述控制终端还包括控制模块,所述控制模块与驱动电机和云台的摄像头连接,所述控制模块用于根据摄像头拍摄的画面计算出墙面法向,与摄像头法向判断出夹角,当摄像头角度<0°时,且夹角大于容许值,则控制模块通过驱动电机控制云台的摄像头向上仰角;当摄像头角度>0°时,则控制模块通过驱动电机控制云台的摄像头向下俯角。
6、进一步,所述摄像头的像素大于2000万,所述摄像头的最小快门速度小于1/1000秒;所述无人机的工作时间大于2小时。
7、进一步,所述安装支架还包括上减震支架和下减震支架,所述无人机安装部和云台安装部之间通过减震杆连接,所述上减震支架固定在无人机安装部上,所述下减震支架安装在云台安装部上,所述上减震支架和下减震支架之间通过螺栓连接,且上减震支架和下减震支架之间螺栓连接的螺杆处填充橡胶圈。
8、进一步,所述色差量化模块包括灰度划分单元、色差块标记单元以及色差量化模型单元,所述灰度划分单元用于将清水混凝土色差初步量化结果中的图像数据根据预设的平均灰度值划分为不同的灰度范围,生成不同范围的图像数据;所述色差块标记单元用于将清水混凝土色差初步量化结果中的图像数据通过标注工具进行色差块标记,生成带有色差块标签信息的数据集;所述色差量化模型单元用于根据改进的resnet50语义分割算法构建并清水混凝土色差量化模型,并基于训练指标训练清水混凝土色差量化模型,将数据集作为训练完成的清水混凝土色差量化模型的输入图像,输出清水混凝土色差量化结果。
9、进一步,所述改进的resnet50语义分割算法具体为:
10、由backbone主网络、fcn head次网络和deeplab次网络组成resnet50语义分割框架;
11、将backbone主网络中的残差网络结构的左侧残差结构的1×1卷积核映射框滑动步长调整为1,3×3卷积核映射框滑动步长调整为2;
12、右侧残差结构中添加卷积核尺寸为2×2,映射框滑动步长为1的最大池化层。
13、进一步,所述色差量化模型单元中训练指标包括学习率、损失函数以及准确率评价指标,所述准确率评价指标包括像素准确率、类别平均像素准确率、交并比和平均交并比;所述像素准确率评价公式为:
14、
15、其中,pa表示像素准确率,tp表示模型预测结果与实际标签结果相同,结果类别均为1,tn表示表示模型预测结果类别为0且实际标签结果类别为1,fp表示表示模型预测结果类别为1且实际标签结果类别为0,fn表示表示模型预测结果与实际标签结果相同,结果类别均为0;
16、所述类别平均像素准确率评价公式为:
17、
18、所述交并比评价公式为:
19、
20、其中,iou表示交并比。
21、进一步,所述控制终端还包括图像畸变模块,所述图像畸变模块用于根据径向畸变值模型和切向畸变值模型获取无人机采集设备的最佳拍摄距离。
22、进一步,所述径向畸变值模型的表达式为:
23、
24、其中,xd和yd表示x,y方向的径向畸变值;ω1、ω2、ω3表示x,y方向的径向畸变系数;
25、切向畸变值模型的表达式为:
26、
27、其中,xs和ys表示x,y方向的切向畸变值;λ1、λ2、λ3、λ4表示x,y方向的切向畸变系数。
28、本发明的原理及优点在于:在本技术的设备结构方面,将云台通过安装支架与无人机进行连接,安装支架中,包括有无人机安装部和云台安装部,无人机安装部与无人机连接时,可控制云台的左右旋转角度,云台安装部与云台安装时,通过云台上开设的滑槽,滑槽内的齿链与云台安装部上的活动齿轮进行啮合,能够控制云台在拍摄时的上下角度的转动,并且本技术中设置减震机构,在云台转动时能够将产生的机械振动传输至减震机构进行消除,减少云台拍摄时的抖动现象。
29、而在本技术中的图像采集方面,通过图像畸变模型确定采集距离,设计无人机云台的采集角度,从数据采集的源头缩小图像平均灰度差距;随后将采集的数据传输至控制终端中,通过控制终端的数据预处理模块进行图像数据的预处理,通过色差识别模块对图像数据进行处理和输出色差图像初步量化结果,再通过色差量化模块对初步量化的结果进行再处理,提升清水混凝土量化效果,最终实现对清水混凝土的色差的有效检测和识别。
- 还没有人留言评论。精彩留言会获得点赞!