一种点云配准实现方法、装置、存储介质及电子设备与流程
本申请涉及点云数据处理领域,具体而言,涉及一种点云配准实现方法、装置、存储介质及电子设备。
背景技术:
1、点云配准是通过计算两个点云之间的变换矩阵,其中包含旋转信息和平移信息,将一个点云(源点云)与另一个点云(目标点云)对齐,从而使它们在同一坐标系下表达相同场景的过程。该过程的目标是实现两个点云的空间一致性,使它们的特征点或描述子能够相互匹配。
2、点云配准的精度直接影响了后续步骤(如误差分析、三维重建、目标识别、姿态估计等)的可靠性。在计算机视觉领域和计算机辅助几何领域,点云配准是一项至关重要的任务,广泛应用于立体匹配、目标识别、姿态估计、图像匹配等应用中。通过正确地将不同视角或时间采集的点云对齐,可以建立更准确和完整的三维场景模型,为各种应用提供可靠的空间信息。
3、如何快速准确地实现点云配准,成为了本领域技术人员所持续关注的难题。
技术实现思路
1、本申请的目的在于提供一种点云配准实现方法、装置、存储介质及电子设备,以至少部分改善上述问题。
2、为了实现上述目的,本申请实施例采用的技术方案如下:
3、第一方面,本申请实施例提供一种点云配准实现方法,所述方法包括:
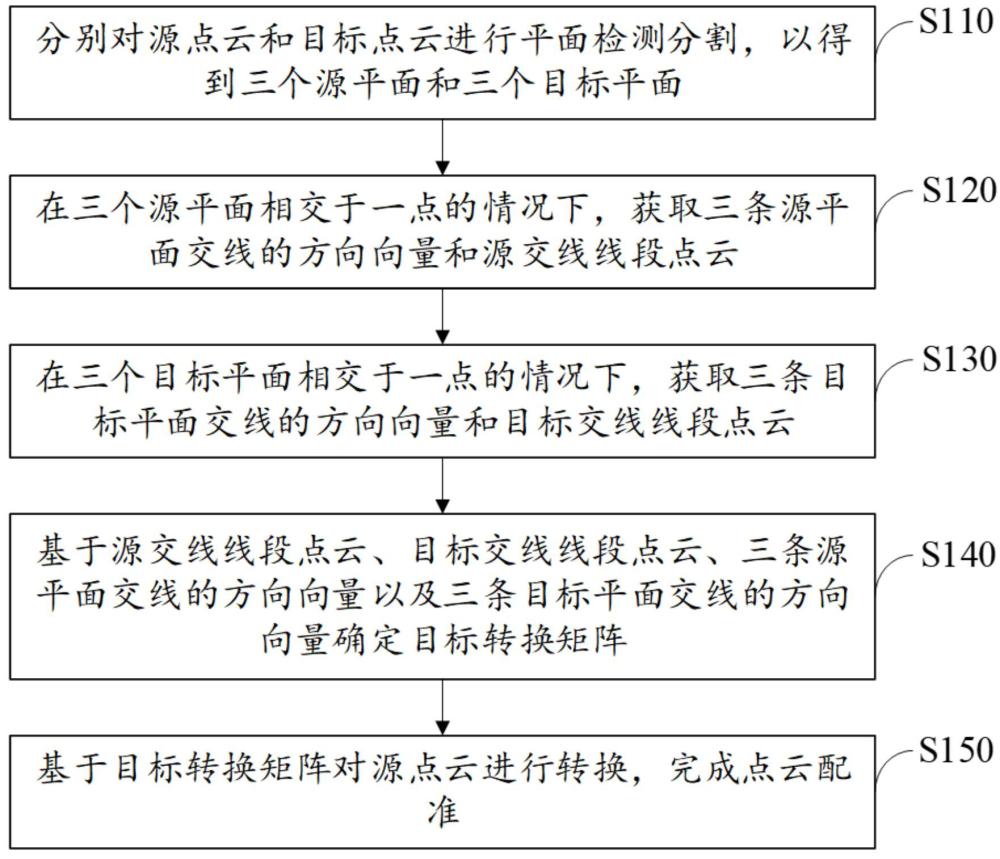
4、分别对源点云和目标点云进行平面检测分割,以得到三个源平面和三个目标平面,其中,三个源平面为从所述源点云中分割出的内点数量最多的三个平面,三个目标平面为从所述目标点云中分割出的内点数量最多的三个平面;
5、在所述三个源平面相交于一点的情况下,获取三条源平面交线的方向向量和源交线线段点云;
6、在所述三个目标平面相交于一点的情况下,获取三条目标平面交线的方向向量和目标交线线段点云;
7、基于所述源交线线段点云、所述目标交线线段点云、三条源平面交线的方向向量以及三条目标平面交线的方向向量确定目标转换矩阵;
8、基于所述目标转换矩阵对所述源点云进行转换,完成点云配准。
9、第二方面,本申请实施例提供一种点云配准实现装置,所述装置包括:
10、第一处理单元,用于分别对源点云和目标点云进行平面检测分割,以得到三个源平面和三个目标平面,其中,三个源平面为从所述源点云中分割出的内点数量最多的三个平面,三个目标平面为从所述目标点云中分割出的内点数量最多的三个平面;
11、所述第一处理单元还用于在所述三个源平面相交于一点的情况下,获取三条源平面交线的方向向量和源交线线段点云;
12、所述第一处理单元还用于在所述三个目标平面相交于一点的情况下,获取三条目标平面交线的方向向量和目标交线线段点云;
13、所述第一处理单元还用于基于所述源交线线段点云、所述目标交线线段点云、三条源平面交线的方向向量以及三条目标平面交线的方向向量确定目标转换矩阵;
14、第二处理单元,用于基于所述目标转换矩阵对所述源点云进行转换,完成点云配准。
15、第三方面,本申请实施例提供一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述的方法。
16、第四方面,本申请实施例提供一种电子设备,所述电子设备包括:处理器和存储器,所述存储器用于存储一个或多个程序;当所述一个或多个程序被所述处理器执行时,实现上述的方法。
17、相对于现有技术,本申请实施例所提供的一种点云配准实现方法、装置、存储介质及电子设备,包括:分别对源点云和目标点云进行平面检测分割,以得到三个源平面和三个目标平面,其中,三个源平面为从源点云中分割出的内点数量最多的三个平面,三个目标平面为从目标点云中分割出的内点数量最多的三个平面;在三个源平面相交于一点的情况下,获取三条源平面交线的方向向量和源交线线段点云;在三个目标平面相交于一点的情况下,获取三条目标平面交线的方向向量和目标交线线段点云;基于源交线线段点云、目标交线线段点云、三条源平面交线的方向向量以及三条目标平面交线的方向向量确定目标转换矩阵;基于目标转换矩阵对源点云进行转换,完成点云配准。基于源交线线段点云、目标交线线段点云、三条源平面交线的方向向量以及三条目标平面交线的方向向量确定目标转换矩阵,相对于基于所有点云数据去推导目标转换矩阵,极大地降低了计算量,提升处理效率,并且可以排除拍摄误差,所带来的影响,提升配置结果的准确度,实现点云的准确快速配准。
18、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种点云配准实现方法,其特征在于,所述方法包括:
2.如权利要求1所述的点云配准实现方法,其特征在于,所述获取三条源平面交线的方向向量和源交线线段点云的步骤,包括:
3.如权利要求2所述的点云配准实现方法,其特征在于,所述获取所述三个源平面的源交点坐标和三条源平面交线的初始方向向量的步骤,包括:
4.如权利要求2所述的点云配准实现方法,其特征在于,所述基于所述三条源平面交线的初始方向向量和所述三个源平面确定每一条所述源平面交线的端点坐标的步骤,包括:
5.如权利要求2所述的点云配准实现方法,其特征在于,所述基于所述源交点坐标和所述源平面交线的端点坐标,确定每一条所述源平面交线的方向向量的步骤,包括:
6.如权利要求2所述的点云配准实现方法,其特征在于,所述获取所述三条源平面交线对应的源交线线段点云的步骤,包括:
7.如权利要求1所述的点云配准实现方法,其特征在于,所述获取三条目标平面交线的方向向量和目标交线线段点云的步骤,包括:
8.如权利要求1所述的点云配准实现方法,其特征在于,所述基于所述源交线线段点云、所述目标交线线段点云、三条源平面交线的方向向量以及三条目标平面交线的方向向量确定目标转换矩阵的步骤,包括:
9.一种点云配准实现装置,其特征在于,所述装置包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1-8中任一项所述的方法。
11.一种电子设备,其特征在于,包括:处理器和存储器,所述存储器用于存储一个或多个程序;当所述一个或多个程序被所述处理器执行时,实现如权利要求1-8中任一项所述的方法。
技术总结
本申请提出一种点云配准实现方法、装置、存储介质及电子设备,分别对源点云和目标点云进行平面检测分割,以得到三个源平面和三个目标平面获取三条源平面交线的方向向量和源交线线段点云;获取三条目标平面交线的方向向量和目标交线线段点云;基于源交线线段点云、目标交线线段点云、三条源平面交线的方向向量以及三条目标平面交线的方向向量确定目标转换矩阵;基于目标转换矩阵对源点云进行转换,完成点云配准。极大地降低了计算量,提升处理效率,并且可以排除拍摄误差,所带来的影响,提升配置结果的准确度,实现点云的准确快速配准。
技术研发人员:杜冬晖,郭胜男,宋昱,束健,于江磊,翟晓琴
受保护的技术使用者:法奥意威(苏州)机器人系统有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!