基于图像识别的振冲碎石桩留振深度和留振时间监测方法与流程
本发明岩土工程地基处理施工监测,具体涉及了一种基于图像识别的振冲碎石桩留振深度和留振时间监测方法。
背景技术:
1、由于我国西南等地存在大量在建的重要水利水电基础设施,而这些地区的天然地基覆盖层其土体力学性质往往难以满足大型构筑物的承载力和抗液化要求,因而往往需要对原天然地基土体加以处理来改善其土体的物理力学性质。
2、振冲碎石桩技术自上世纪60年代被提出,因其具备的加筋效应和丰富的抗液化内涵而在过去的几十年内被广泛使用。同时振冲碎石桩也因施工较为方便,技术要求不高而成为最为经济的地基处理手段之一。振冲碎石桩主要通过控制振冲器在各深度处进行充分的留振,使得各深度内的周边土体被振挤加密,并形成符合设计要求的碎石桩体。控制碎石桩成桩质量的关键因素主要是能否保证振冲器在设计的深度处进行充分的留振,使得留振阶段内的密实电流和留振时间符合设计要求。
3、但由于振冲器施工作业在地表以下开展,振冲器处理地基的深度以往都是操作人员通过观察振冲器导杆上的刻度线变化进行判断,对应深度处的留振时间也是结合密实电流时程曲线由操作人员进行判断。这种施工方式存在较强的人为主观因素,难以保证施工质量,且对操作人员的操作经验、精力和注意力等要求较高,不利于长期施工。
技术实现思路
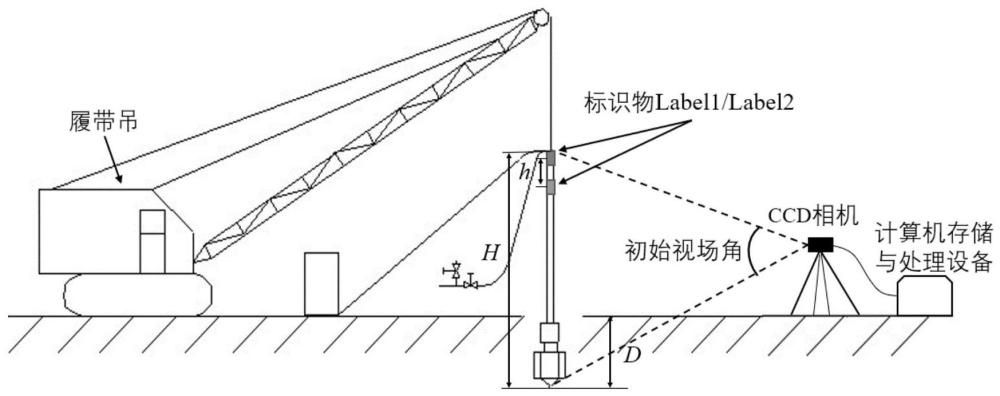
1、为了解决背景技术中存在的问题,实时监测振冲碎石桩的留振深度,确定不同留振深度内振冲器的留振时间,本发明的目的在于提供一种基于图像识别的振冲碎石桩留振深度和留振时间监测方法。通过在振冲施工现场布设ccd工业相机,实时抓取振冲器导杆标识物位置,并利用图像识别算法对振冲器的振冲深度进行定位,结合密实电流时程曲线,进一步标记处振冲器的留振深度和留振时间,辅助操作人员进行判断和施工。
2、本发明所采用的技术方案如下,包括以下步骤:
3、s1、首先,选取标识物,并将标识物安装在振冲器导杆的端部;然后通过拍摄一定数量的施工现场图像来构建图像训练集;
4、s2、将ccd工业相机、计算机存储与处理设备设置在施工现场,利用ccd工业相机拍摄振冲器在振冲施工全过程的图像,并将施工过程的图像实时传输到计算机存储与处理设备中;
5、s3、利用计算机存储与处理设备对输入的施工过程的图像进行处理,实时提取标识物的真实空间坐标,并获取振冲器的实时施工深度d,绘制实时振冲深度时间曲线。
6、s4、根据实时振冲深度时间曲线,通过预先确定的密实电流设计值和留振深度变化率阈值,获取留振时间和留振深度。
7、所述步骤s1具体为:
8、s11、选取两个标识物,将两个标识物均固定在振冲器导杆上;其中一个标识物位于振冲器导杆的顶端,另一个标识物位于刚好暴露在地面以上位置处;
9、s12、利用相机对施工现场进行多角度拍摄,得到若干张拍摄到振冲器的施工现场图像;所述施工现场图像包括未拍摄到标识物的图像以及拍摄到标识物的图像;然后对拍摄到标识物图像中的标识物进行标注;标注完毕后,利用所有的施工现场图像构建图像训练集。
10、所述步骤s2具体为:
11、s21:首先对ccd工业相机的型号以及安装位置进行选取,使得ccd工业相机捕捉振冲器全长度范围内的振冲施工过程;
12、s22:然后,将ccd工业相机按照选定的安装位置放置在施工现场,接着在施工现场设置无线通信设备以及计算机存储与处理设备,再将ccd工业相机和计算机存储与处理设备进行连接;
13、s23:启动ccd工业相机,利用ccd工业相机拍摄振冲器在振冲施工全过程的图像,并将振冲施工过程的图像实时传输到计算机存储与处理设备中;
14、所述步骤s3具体为:
15、s31、在计算机存储与处理设备中构建用于定位标识物的识别定位模型,将步骤1中的图像训练集输入到构建好的识别定位模型中进行训练,完成训练后获取训练后的识别定位模型;所述识别定位模型的输入为图像训练集中的施工现场图像,输出为施工现场图像中标识物的像素坐标;
16、s32、施工过程的图像传输到计算机存储与处理设备后,根据第i帧施工图像内振冲器的尺寸,确定图像识别算法中该帧施工图像对应的目标检测范围;所述第i帧施工图像对应的目标检测范围包含该帧施工图像内振冲器的外轮廓;
17、s33、将第i帧施工图像输入到训练好且带有图像识别算法的识别定位模型中,图像识别算法在目标检测范围内对施工图像中的标识物进行图像识别和跟踪,提取出标识物的像素坐标;接着将标识物的像素坐标转换为空间坐标;
18、s34、利用第i帧施工图像中标识物的空间坐标,获取对应时刻t下振冲器的施工深度d,施工深度d按照以下公式处理得到:
19、
20、式中,h为t时刻振冲器的高度,h为t时刻两个标识物中心的高度差,z1为t时刻位于下方的标识物的高度,z2为t时刻位于上方的标识物的高度;
21、s35、将第i帧施工图像对应的振冲器的施工深度d和时间数据存储在计算机存储与处理设备中,同时通过无线通信设备将施工深度d和时间数据输出至操作平台进行同步显示;
22、s36、重复多次步骤s32~步骤s35,获取各帧施工图像内标识物的空间坐标以及不同时刻下振冲器的施工深度d;接着,建立施工深度d和时刻t的关系曲线作为振冲器的实时振冲深度时间曲线。
23、所述步骤s4具体为:
24、s41、通过计算机存储与处理设备实时采集振冲器的密实电流e,并建立密实电流e和时刻t的关系曲线作为振冲器的密实电流实时监测曲线;结合振冲器的实时振冲深度时间曲线,将密实电流e大于emin且留振深度变化率f小于fmax的时间区间作为留振时间段;
25、其中,emin为给定的密实电流设计值;fmax为给定的留振深度变化率阈值;上式中,振冲器的留振深度变化率f按照以下公式处理得到:
26、
27、其中,d为施工深度;
28、s42、将每个留振时间段的总时长作为振冲器的留振时间,将每个留振时间段内的平均施工深度d作为留振深度。
29、所述标识物的颜色与振冲器以及周边环境相比具有色差;所述标识物完全包裹在振冲器导杆的外周。
30、所述标识物距离地面的高度不超过给定的深度定位精度δd的两倍,标识物距离地面的高度不小于预设的振冲碎石桩施工深度,两个标识物之间的高度差为给定的高差值h。
31、为实现振冲碎石桩施工过程自动化监测,本发明提出来一种基于图像识别的振冲碎石桩留振深度和留振时间实时监测方法,通过图像识别技术对振冲器施工深度进行实时监测,并结合施工深度时间曲线和密实电流时间曲线,自动计算振冲器的留振深度和留振时间,并以时间区间标记的形式实时输出至操作平台供操作人员进行读取与判断,保障了施工质量的同时极大降低了操作人员的工作强度。
32、本发明的有益效果:
33、1、本发明实现了振冲器留振深度的实时定位,与传统操作人员观察导杆上刻度来判断振冲深度的方式相比大大提高了效率和准确性,降低了操作人员工作强度。
34、2、本发明实现了振冲留振时间的自动计算和标记,与传统操作人员通过人为判断留振时间的方式更加合理准确,极大地保障了振冲碎石桩的施工质量,也降低了对操作人员经验的要求。
- 还没有人留言评论。精彩留言会获得点赞!