一种飞行器临界滑翔弹道预测方法、装置、设备及介质
本技术涉及飞行器制导,具体而言,涉及一种飞行器临界滑翔弹道预测方法、装置、设备及介质。
背景技术:
1、对于探月返回等再入飞行任务,飞行器的再入初速接近第二宇宙速度。对于传统的平稳滑翔弹道,飞行速度小于第一宇宙速度,离心力小于重力,升力向上以平衡重力、离心力和惯性力等作用;当飞行速度大于第一宇宙速度时,离心力大于重力,升力向下以实现纵向受力平衡。因此,再入初速接近第二宇宙速度的滑翔飞行器在再入滑翔过程中将经历从大于第一宇宙速度到小于第一宇宙速度的飞行模态变化。当飞行速度达到奇异速度时,维持纵向受力平衡所需的升力为零。飞行器速度在奇异速度附近时的滑翔状态称为临界滑翔。
2、在临界滑翔过程中,由于飞行速度接近奇异速度,纵向升力的大小很小;因此导致现有基于飞行速度和纵向升力的飞行器弹道预测方法不能应用于临界滑翔弹道的预测场景下;且现有技术也缺乏能够高精度、高效率的预测临界滑翔弹道参数的方法。
技术实现思路
1、本技术实施例的目的在于提供一种飞行器临界滑翔弹道预测方法、装置、设备及介质,用以解决现有技术存在的上述问题,可高效率、高精度的进行临界滑翔弹道预测。
2、第一方面,提供了一种飞行器临界滑翔弹道预测方法,该方法可以包括:
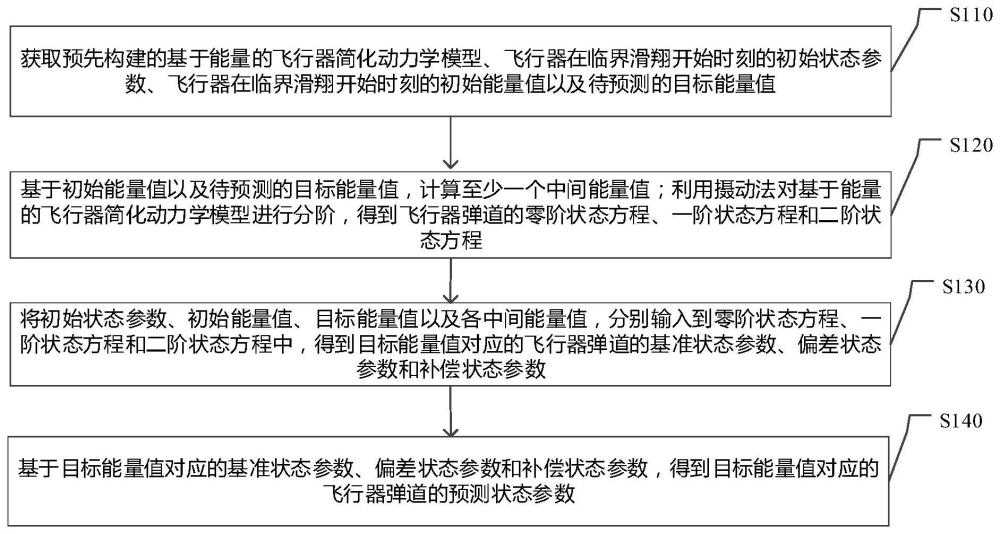
3、获取预先构建的基于能量的飞行器简化动力学模型、飞行器在临界滑翔开始时刻的初始状态参数、飞行器在临界滑翔开始时刻的初始能量值以及待预测的目标能量值;其中,所述飞行器在任一时刻的能量值为飞行器在相应时刻的机械能;
4、基于所述初始能量值以及所述待预测的目标能量值,计算至少一个中间能量值;其中,各中间能量值均小于所述初始能量值并大于所述目标能量值;
5、利用摄动法对所述基于能量的飞行器简化动力学模型进行分阶,得到飞行器弹道的零阶状态方程、一阶状态方程和二阶状态方程;
6、将所述初始状态参数、所述初始能量值、所述目标能量值以及各中间能量值,分别输入到所述零阶状态方程、所述一阶状态方程和所述二阶状态方程中,得到所述目标能量值对应的飞行器弹道的基准状态参数、偏差状态参数和补偿状态参数;
7、基于所述目标能量值对应的所述基准状态参数、所述偏差状态参数和所述补偿状态参数,得到所述目标能量值对应的飞行器弹道的预测状态参数。
8、在一个可选的实现中,所述飞行器简化动力学模型的构建,包括:
9、构建在旋转圆形地球背景下的飞行器的再入飞行动力学模型;
10、对所述再入飞行动力学模型进行转换,得到基于广义经纬坐标的飞行器再入动力学模型;
11、对所述基于广义经纬坐标的飞行器再入动力学模型进行简化,得到基于能量的飞行器简化动力学模型;其中,所述基于能量的飞行器简化动力学模型以能量为自变量、以阻力加速度和横向升阻比为控制量。
12、在一个可选的实现中,所述基于能量的飞行器简化动力学模型,如下:
13、
14、
15、
16、其中,xd表示纵程;e表示飞行器的能量值;re表示平均地球半径,表示广义航向角;ad表示阻力加速度;xc表示横程;l表示升力;d表示阻力;ωe表示地球自转角速度;v表示飞行器相对旋转地球的速度;φ表示飞行器所在位置的纬度;μ表示地球引力常数;r*表示飞行器质心到地球中心的平均距离。
17、在一个可选的实现中,利用摄动法对所述基于能量的飞行器简化动力学模型进行分阶,得到飞行器弹道的零阶状态方程、一阶状态方程和二阶状态方程,包括:
18、基于摄动法,利用泰勒展开对所述基于能量的飞行器简化动力学模型进行分阶,分别得到飞行器弹道的零阶状态方程、一阶状态方程和二阶状态方程。
19、在一个可选的实现中,将所述初始状态参数、所述初始能量值、所述目标能量值以及各中间能量值,分别输入到所述零阶状态方程、所述一阶状态方程和所述二阶状态方程中,得到所述目标能量值对应的飞行器弹道的基准状态参数、偏差状态参数和补偿状态参数,包括:
20、将所述零阶状态方程、所述一阶状态方程和所述二阶状态方程中阻力加速度的倒数和横向升阻比转换为低次多项式的形式,分别得到转换后的零阶状态方程、转换后的一阶状态方程和转换后的二阶状态方程;
21、将所述初始状态参数、所述初始能量值、所述目标能量值以及各中间能量值,分别输入所述转换后的零阶状态方程、所述转换后的一阶状态方程和所述转换后的二阶状态方程中,得到所述目标能量值对应的飞行器弹道的基准状态参数、偏差状态参数和补偿状态参数。
22、在一个可选的实现中,将所述初始状态参数、所述初始能量值、所述目标能量值以及各中间能量值,分别输入所述转换后的零阶状态方程、所述转换后的一阶状态方程和所述转换后的二阶状态方程中,得到所述目标能量值对应的飞行器弹道的基准状态参数、偏差状态参数和补偿状态参数,包括:
23、将所述初始状态参数、所述初始能量值、所述目标能量值以及各中间能量值,输入所述零阶状态方程中,得到所述目标能量值对应的飞行器弹道的基准状态参数;
24、将所述初始状态参数、所述初始能量值、所述目标能量值以及各中间能量值,输入所述一阶状态方程中,得到所述目标能量值对应的飞行器弹道的偏差状态参数;
25、将所述初始状态参数、所述初始能量值、所述目标能量值以及各中间能量值,输入所述二阶状态方程中,得到所述目标能量值对应的飞行器弹道的补偿状态参数。
26、在一个可选的实现中,所述飞行器弹道的零阶状态方程,如下:
27、
28、
29、
30、其中,表示纵程的零阶值;表示横程的零阶值;表示广义航向角的零阶值;
31、所述飞行器弹道的一阶状态方程,如下:
32、
33、
34、
35、其中,表示纵程的一阶值;表示横程的一阶值;表示广义航向角的一阶值;φ(0)表示飞行器所在位置的纬度的零阶值;
36、所述飞行器弹道的二阶状态方程,如下:
37、
38、
39、
40、其中,表示纵程的一阶值;表示横程的二阶值;表示广义航向角的二阶值。
41、第二方面,提供了一种飞行器临界滑翔弹道预测装置,该装置可以包括:
42、获取单元,用于获取预先构建的基于能量的飞行器简化动力学模型、飞行器在临界滑翔开始时刻的初始状态参数、飞行器在临界滑翔开始时刻的初始能量值以及待预测的目标能量值;其中,所述飞行器在任一时刻的能量值为飞行器在相应时刻的机械能;
43、计算单元,用于基于所述初始能量值以及所述待预测的目标能量值,计算至少一个中间能量值;其中,各中间能量值均小于所述初始能量值并大于所述目标能量值;
44、分阶单元,用于利用摄动法对所述基于能量的飞行器简化动力学模型进行分阶,得到飞行器弹道的零阶状态方程、一阶状态方程和二阶状态方程;
45、预测单元,用于将所述初始状态参数、所述初始能量值、所述目标能量值以及各中间能量值,分别输入到所述零阶状态方程、所述一阶状态方程和所述二阶状态方程中,得到所述目标能量值对应的飞行器弹道的基准状态参数、偏差状态参数和补偿状态参数;基于所述目标能量值对应的所述基准状态参数、所述偏差状态参数和所述补偿状态参数,得到所述目标能量值对应的飞行器弹道的预测状态参数。
46、第三方面,提供了一种电子设备,该电子设备包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
47、存储器,用于存放计算机程序;
48、处理器,用于执行存储器上所存放的程序时,实现上述第一方面中任一所述的方法步骤。
49、第四方面,提供了一种计算机可读存储介质,该计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面中任一所述的方法步骤。
50、本技术的飞行器临界滑翔弹道预测方法通过对预先构建的基于广义状态的降阶动力学模型进行简化处理,得到以能量为自变量,以阻力加速度倒数和横向升阻比为控制量的飞行器简化动力学模型;通过将飞行器简化动力学模型规划为低次多项式的形式,再引入摄动法将动力学模型解耦为三个可以近似解析求解的子系统;在推导过程中采用多项式拟合、谱分解等方法,成功得到了纵程、横程和广义航向角的预测值。
51、本技术能够高效、精准、稳定的对飞行器弹道进行预测,从而提高飞行器制导的效率、稳定性以及经度。
- 还没有人留言评论。精彩留言会获得点赞!