一种基于优化集成学习的三维电气工件点云分类方法
本发明涉及机器学习和三维视觉,特别涉及一种基于优化集成学习的三维电气工件点云分类方法。
背景技术:
1、三维电气工件点云分类是基于三维点云的多类别电气工件自动抓取和分拣过程中的一个重要环节。然而,由于三维点云的稀疏性、不规则性、无序性和旋转不变性等缺陷,进行三维点云分类存在一定困难。
2、在三维点云分类问题中,使用有效的分类器对基于三维点云提取的特征进行分类是关键。基于机器学习算法的三维点云分类方法首先需要对原始三维点云进行预处理操作,以获得待分类目标三维点云;然后使用法线估计、体素化和三维特征描述子等方法提取三维点云特征;最后选择合适的分类器学习三维点云特征并进行分类。
3、现有研究常用的分类器包括决策树、k最近邻、支持向量机、随机森林和xgboost等。其中,单一分类器易于理解并且训练速度快,但其鲁棒性较差,具有欠拟合风险,可能会降低三维点云的分类精度。相反的,集成分类器泛化性较强,分类精度通常高于单一分类器,但随着集成分类器中基分类器规模的增大,集成分类器的分类速度可能会显著降低,同时所需的存储空间也会增加。
4、因此,降低集成分类器所占用的存储空间,同时提高三维点云的分类精度是现有研究改进与提高的方向。
技术实现思路
1、鉴于上述现有技术的不足之处,本发明的目的在于提供一种基于优化集成学习的三维电气工件点云分类方法,旨在于缩小集成分类器的集成规模,提高三维电气工件点云分类精度。
2、为了达到上述目的,本发明采取了以下技术方案:
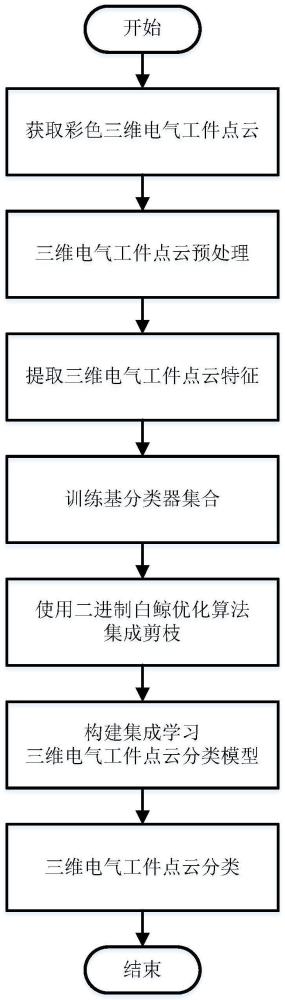
3、第一方面,一种基于优化集成学习的三维电气工件点云分类方法,所述分类方法包括:
4、步骤1:通过深度传感器获取训练集电气工件深度图像和测试集电气工件深度图像,并根据训练集电气工件深度图像和测试集电气工件深度图像获取训练集目标三维电气工件点云和测试集目标三维电气工件点云;
5、步骤2:根据训练集目标三维电气工件点云和测试集目标三维电气工件点云,获取训练集948维特征向量和测试集948维特征向量,并将训练集948维特征向量按照7:3划分为第二训练集948维特征向量和第二验证集948维特征向量;
6、步骤3:通过自助法从第二训练集948维特征向量中抽取m个训练子集,并分别训练m棵分类与回归树基分类器,获取基分类器集合;
7、步骤4:通过基分类器集合中的每个棵分类与回归树基分类器对第二验证集948维特征向量进行分类,并将每个棵分类与回归树基分类器的分类结果转换为0-1向量保存;
8、步骤5:通过二进制白鲸优化算法集成剪枝,将步骤4中获取的0-1向量输入至二进制白鲸优化算法中,输出算法获取的最优集成剪枝方案;
9、步骤6:根据最优集成剪枝方案选择基分类器集合中的分类与回归树基分类器,从而构建集成学习三维电气工件点云分类模型,并使用集成学习三维电气工件点云分类模型进行三维电气工件点云分类。
10、进一步地,所述通过深度传感器获取训练集电气工件深度图像和测试集电气工件深度图像,并根据训练集电气工件深度图像和测试集电气工件深度图像获取训练集目标三维电气工件点云和测试集目标三维电气工件点云包括:
11、步骤1.1:通过深度传感器获取训练集电气工件深度图像和测试集电气工件深度图像,并将训练集电气工件深度图像和测试集电气工件深度图像分别转换为训练集无色三维电气工件点云和测试集无色三维电气工件点云,转换公式如下:
12、
13、其中,x和y是深度图像中某个像素点pd的坐标,xc,yc,zc是像素点pd对应的相机坐标中的某个点pc的空间坐标值,fx=f/dx,fy=f/dy,f是相机焦距,dx和dy是像素的实际物理大小,(u0,v0)表示像平面坐标系原点在像素坐标系下的坐标,depth是像素点pd对应的深度值;
14、步骤1.2:采集训练集电气工件彩色图像和测试集电气工件彩色图像,将训练集电气工件深度图像和测试集电气工件深度图像与训练集电气工件彩色图像和测试集电气工件彩色图像分别对齐,根据像素对应关系将训练集无色三维电气工件点云和测试集无色三维电气工件点云转换为训练集彩色三维电气工件点云和测试集彩色三维电气工件点云;
15、步骤1.3:分别对训练集彩色三维电气工件点云和测试集彩色三维电气工件点云预处理,获取训练集目标三维电气工件点云和测试集目标三维电气工件点云。
16、进一步地,所述分别对训练集彩色三维电气工件点云和测试集彩色三维电气工件点云预处理,获取训练集目标三维电气工件点云和测试集目标三维电气工件点云包括:
17、步骤1.31:去除训练集彩色三维电气工件点云和测试集彩色三维电气工件点云中与三维电气工件点云分类无关的载物平台点云,公式如下:
18、
19、其中,xi,yi,zi是三维电气工件点云中任意一点p的空间坐标值,xmin,xmax,ymin,ymax,zmin,zmax是在三个空间坐标轴上人工设置的阈值,用于去除阈值范围内的载物平台点云;
20、步骤1.32:使用半径滤波算法首次去除训练集彩色三维电气工件点云和测试集彩色三维电气工件点云中的噪声点,公式如下:
21、p′={pi(xi,yi,zi)∈p|k(pi,r1)>k1} (3)
22、其中,p为原始三维电气工件点云,p′为去除噪声点后的三维电气工件点云,r1和k1是人工设置的阈值,分别表示半径和近邻点个数,k(pi,r1)表示点pi邻域半径r1内近邻点的个数;
23、步骤1.33:使用统计滤波算法再次去除p′中的噪声点,通过式(4)计算p′中每个点距其k2个近邻点距离和的均值通过式(5)计算的均值与标准差σ,将值在范围外的点视为噪声点并去除:
24、
25、
26、其中,k2和s是人工设置的阈值,分别表示近邻点个数和剔除尺度,n为三维电气工件点云中点的总数;
27、步骤1.34:采用具有噪声应用的基于密度的空间聚类算法分割去噪后的测试集彩色三维电气工件点云;
28、步骤1.35:进行点云精简,随机选择经过步骤1.31-1.34处理后的训练集彩色三维电气工件点云和测试集彩色三维电气工件点云中的1024个点并保存。
29、进一步地,所述采用具有噪声应用的基于密度的空间聚类算法分割去噪后的测试集彩色三维电气工件点云包括:
30、步骤1.341:设置阈值r2和k3,在去噪后的测试集彩色三维电气工件点云中随机选择一个未被访问的点pi作为初始聚类点,若该点邻域半径r2内点的数量不小于k3,则pi及其邻域半径r2的点均被定义为核心点,都属于同一聚类簇;
31、步骤1.342:搜索核心点邻域半径r2内的点来丰富聚类簇,直到没有新的点加入聚类簇;
32、步骤1.343:重复步骤1.341和步骤1.342,直到测试集彩色三维电气工件点云中的所有点均被访问,完成聚类分割。
33、进一步地,所述根据训练集目标三维电气工件点云和测试集目标三维电气工件点云,获取训练集948维特征向量和测试集948维特征向量包括:
34、步骤2.1:分别提取训练集目标三维电气工件点云的聚类视点特征直方图特征和形状函数集合特征,获取训练集目标三维电气工件聚类视点特征直方图特征和训练集目标三维电气工件形状函数集合特征;
35、步骤2.2:分别提取测试集目标三维电气工件点云的聚类视点特征直方图特征和形状函数集合特征,获取测试集目标三维电气工件聚类视点特征直方图特征和测试集目标三维电气工件形状函数集合特征;
36、步骤2.3:拼接训练集目标三维电气工件聚类视点特征直方图特征和训练集目标三维电气工件形状函数集合特征,获取训练集948维特征向量,拼接测试集目标三维电气工件聚类视点特征直方图特征和测试集目标三维电气工件形状函数集合特征,获取测试集948维特征向量。
37、进一步地,所述通过二进制白鲸优化算法集成剪枝,将步骤4中获取的0-1向量输入至二进制白鲸优化算法中,输出算法获取的最优集成剪枝方案包括:
38、步骤5.1:将白鲸优化算法进行离散化处理,获得二进制白鲸优化算法;
39、步骤5.2:将步骤4中获得的表示分类正确或错误的0-1向量输入到二进制白鲸优化算法中;
40、步骤5.3:二进制白鲸优化算法为每棵分类与回归树随机赋予权重0或1,0代表该棵分类与回归树不参与集成,1代表该棵分类与回归树参与集成;
41、步骤5.4:二进制白鲸优化算法通过迭代更新权重向量,适应度函数为衡量分类与回归树间差异性的指标:难度度量(difficulty,θ),其值通过步骤4中获得的0-1向量计算,公式如下:
42、θ=var(x) (6)
43、其中,x为离散型随机变量,取值为{0/m,1/m,…,1}(m为步骤3中设置的值),表示对于某个三维电气工件点云特征作出正确分类的分类与回归树数量与分类与回归树总数的比值,θ值越小,表示cart集合的差异性越大;
44、步骤5.5:二进制白鲸优化算法以最小化θ为优化目标进行迭代,迭代结束时输出算法搜索到的具有最小θ值的权重向量,即具有最大差异性的分类与回归树集合,完成集成剪枝,获取最优集成剪枝方案。
45、进一步地,所述将白鲸优化算法进行离散化处理,获得二进制白鲸优化算法包括:
46、步骤5.11:保持白鲸优化算法主体流程和位置更新公式不变,为白鲸种群内的每头白鲸赋予对应的权重向量,权重向量每一维的取值只能取0或1;
47、步骤5.12:使用转换函数t(x)将白鲸i在第t次迭代时新的位置分量转换为该位置对应权重值取0或1的概率值,i=1,2,…,n,j=1,2,…,d,n和d分别表示白鲸种群数量和待解决问题的维度,d的取值等于步骤3中设置的m,t(x)的公式如下:
48、t(x)=1/1+e-2x (7)
49、步骤5.13:根据下面公式确定白鲸i在第t次迭代时新的位置分量对应的新权重值:
50、
51、其中,为白鲸i第t次迭代时第j维对应的新权重值,rand为(0,1)之间的随机数;
52、步骤5.14:在迭代中更新每头白鲸的位置并根据步骤5.13中的公式更新对应的权重向量,进而通过权重向量计算每头白鲸的适应度值;
53、步骤5.15:算法迭代结束,输出具有最优适应度值白鲸对应的权重向量,完成白鲸优化算法离散化处理过程,获得二进制白鲸优化算法。
54、进一步地,所述分类方法还包括:
55、步骤7:使用集成学习三维电气工件点云分类模型对步骤5中获得的测试集948维特征向量进行分类测试,验证集成学习三维电气工件点云分类模型分类精度。
56、进一步地,所述使用集成学习三维电气工件点云分类模型对步骤5中获得的测试集948维特征向量进行分类测试,验证集成学习三维电气工件点云分类模型分类精度包括:
57、步骤7.1:令集成学习三维电气工件点云分类模型中的每棵分类与回归树对步骤2中获得的测试集948维特征向量进行分类,输出分类结果;
58、步骤7.2:使用多数投票法集成每棵分类与回归树输出的分类结果(若票数相同,则在具有相同票数的类别内随机选择,以确定类别),获得测试集948维特征向量中每个特征向量对应的类别;
59、步骤7.3:计算分类精度accuracy,公式如下:
60、
61、其中,c1为分类正确的测试集948维特征向量的特征数量,c2为测试集948维特征向量的特征总数。
62、本发明所采用的技术方案具有以下有益效果:
63、本技术中,使用二进制白鲸优化(binary beluga whale optimization,bbwo)算法,以最大化基分类器分类与回归树(classification and regression tree,cart)间的差异性为优化目标进行集成剪枝,从而构建具有较强泛化性能的集成学习三维电气工件点云分类模型,较大幅度缩小集成规模(集成规模约为现有研究常用集成学习算法的30%左右),提高了三维电气工件点云的分类精度(分类精度约比现有研究常用的集成学习算法高5%左右),使得后续电气工件自动抓取和分拣工作更加高效。
- 还没有人留言评论。精彩留言会获得点赞!