车辆跟踪方法、装置、计算机设备和存储介质与流程
本技术涉及自动驾驶,特别是涉及一种车辆跟踪方法、装置、计算机设备和存储介质。
背景技术:
1、随着技术的进步和科技发展,自动驾驶技术逐渐趋于成熟。感知系统作为实现自动驾驶的基础和前提,以车辆跟踪为核心技术组成,其目的是进行不同图像间的多个车辆目标匹配以获得车辆的行驶轨迹信息,为前方车辆的行驶状态监测和自车行驶路线规划提供有用可靠的信息。摄像头因价格低廉、实用性强、稳定性高等优点被广泛用做车载视觉传感器,具有大感知范围,和小视觉盲区,常采用单目摄像头获取图像数据,并处理获取车辆跟踪信息,有效提升自动驾驶安全性。
2、在传统自动驾驶技术中,包括基于滤波的车辆跟踪算法,例如均值漂移算法、层次关联法、子图分解法等,还包括基于深度学习的车辆跟踪算法,如sort、centertrack等。然而,在复杂的遮挡工况下,传统的基于滤波的车辆跟踪算法难以满足现实环境中光照大幅度变化、目标尺度变化等常见情况,鲁棒性不强,易跟踪失败和轨迹断连,而基于深度学习类方法利用神经网络学习特征获得车辆检测框,简单采用iou匹配策略、级联匹配及卡尔曼滤波会导致目标错误关联及运动估计不准,进而造成多次id跳变及测速测距不准确。
3、因此,目前传统的车辆跟踪技术仍然存在遮挡情况下车辆跟踪准确率低的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高遮挡情况下车辆跟踪准确率的车辆跟踪方法、装置、计算机设备和存储介质。
2、第一个方面,本技术提供了一种车辆跟踪方法,所述车辆跟踪方法包括:
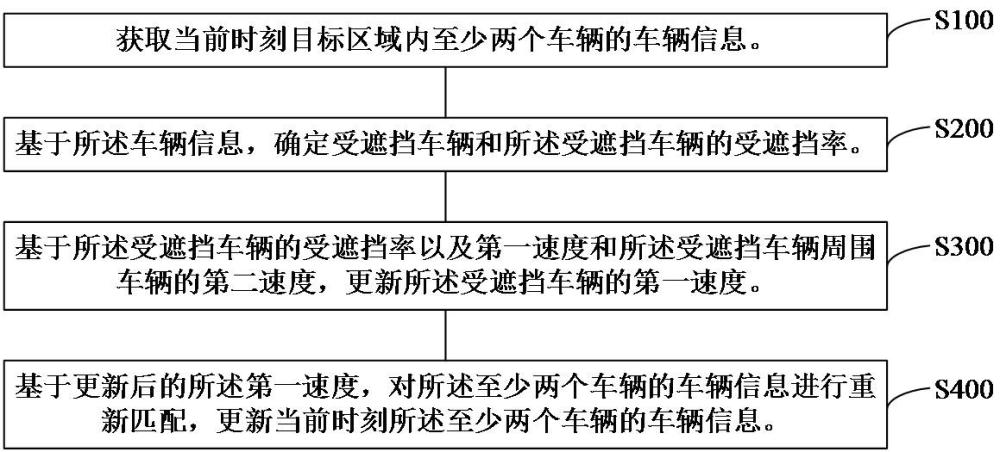
3、获取当前时刻目标区域内至少两个车辆的车辆信息;
4、基于所述车辆信息,确定受遮挡车辆和所述受遮挡车辆的受遮挡率;
5、基于所述受遮挡车辆的受遮挡率以及受遮挡车辆的第一速度和所述受遮挡车辆周围车辆的第二速度,更新受遮挡车辆的第一速度;
6、基于更新后的所述第一速度,对所述目标区域内至少两个车辆的车辆信息进行重新匹配,更新当前时刻所述至少两个车辆的车辆信息。
7、在其中一个实施例中,所述基于所述受遮挡车辆的受遮挡率以及受遮挡车辆的第一速度和所述受遮挡车辆周围车辆的第二速度,更新受遮挡车辆的第一速度包括:
8、根据所述受遮挡车辆的受遮挡率,确定遮挡等级;所述遮挡等级包括重度遮挡和非重度遮挡;
9、若所述遮挡等级为重度遮挡,则基于所述受遮挡车辆的受遮挡率以及受遮挡车辆第一速度和所述受遮挡车辆周围车辆的第二速度,更新所述受遮挡车辆的第一速度。
10、在其中一个实施例中,当所述目标区域内为一条车道时,所述受遮挡车辆周围车辆包括自车车道上的遮挡车辆;所述遮挡车辆为自车车道上距离自身车辆最近的车辆;所述至少两个车辆的车辆信息包括所述遮挡车辆和所述受遮挡车辆的车辆信息;所述基于所述受遮挡车辆的受遮挡率以及受遮挡车辆的第一速度和所述受遮挡车辆周围车辆的第二速度,更新受遮挡车辆的第一速度包括:
11、基于所述受遮挡率,确定遮挡车辆的第一权重,和所述受遮挡车辆的第二权重;
12、基于所述遮挡车辆的第一速度和第一权重,以及所述受遮挡车辆的第二速度和第二权重,计算所述受遮挡车辆的第一估计速度;
13、基于所述受遮挡车辆的第一估计速度,更新所述受遮挡车辆的第一速度。
14、在其中一个实施例中,当所述目标区域内为两条及以上的车道时,所述受遮挡车辆周围车辆包括自车车道上的遮挡车辆以及侧边车道上的侧边车辆,所述受遮挡车辆周围车辆的第二速度包括遮挡车辆的第二遮挡速度以及侧边车辆的第二侧边速度;所述基于所述受遮挡车辆的受遮挡率以及受遮挡车辆的第一速度和所述受遮挡车辆周围车辆的第二速度,更新受遮挡车辆的第一速度包括:
15、获取当前时刻遮挡车辆与前一时刻所述受遮挡车辆的第一距离以及当前时刻侧边车辆与前一时刻所述受遮挡车辆的第二距离;所述第一距离包括第一横向距离和第一纵向距离;所述第二距离包括第二横向距离和第二纵向距离;
16、基于所述第一距离以及第二距离,确定遮挡车辆的第一权重、所述受遮挡车辆的第二权重,以及侧边车辆的第三权重,包括:
17、基于所述第一距离以及第二距离确定第一距离系数和第二距离系数;当目标区域为两条车道时,第一距离系数为第一横向距离与第一纵向距离的差值的平方和,第二距离系数为第二横向距离与第二纵向距离的差值的平方和;当目标区域为三条及以上的车道时,第一距离系数为第一横向距离与第一纵向距离的差值的平方和的二倍值,第二距离系数为第二横向距离与第二纵向距离的差值的平方和;
18、基于所述第一距离系数和第二距离系数,确定遮挡车辆的第一权重、所述受遮挡车辆的第二权重,以及侧边车辆的第三权重,其中,所述第一权重为第二距离系数除以第一距离系数与第二距离系数之和的二倍值;所述第二权重为二分之一;所述第三权重为第一距离系数除以第一距离系数与第二距离系数之和的二倍值;
19、基于所述遮挡车辆的第二遮挡速度和第一权重、所述受遮挡车辆的第一速度和第二权重,以及所述侧边车辆的第二侧边速度和第三权重,计算所述受遮挡车辆的第一估计速度;
20、基于所述受遮挡车辆的第一估计速度,更新所述受遮挡车辆的第一速度。
21、在其中一个实施例中,所述基于所述第一估计速度,更新所述受遮挡车辆的第一速度包括:
22、获取前一时刻所述受遮挡车辆的第三速度;
23、基于所述第一估计速度,确定所述第一估计速度对应的速度变化阈值;
24、根据所述第一估计速度以及第三速度,确定速度变化量;
25、若所述速度变化量小于等于速度变化阈值,则基于所述第一估计速度,更新所述受遮挡车辆的第一速度;
26、若所述速度变化量大于速度变化阈值,则基于所述第三速度,更新所述受遮挡车辆的第一速度。
27、在其中一个实施例中,所述基于所述第三速度,更新所述受遮挡车辆的第一速度包括:
28、若所述速度变化量大于速度变化阈值的连续时刻数量在预设第一数量范围内,则基于所述第三速度,更新所述受遮挡车辆的第一速度;
29、若所述速度变化量大于速度变化阈值的连续时刻数量大于预设第一数量范围,则基于第三速度进行卡尔曼滤波估计得到第二估计速度,基于第二估计速度,更新所述受遮挡车辆的第一速度;且若连续预设时刻下所述第一估计速度与所述第二估计速度小于等于相对误差阈值,则基于第一估计速度,更新所述受遮挡车辆的第一速度。
30、在其中一个实施例中,所述基于更新后的所述第一速度,对所述至少两个车辆的车辆信息进行重新匹配,更新当前时刻所述目标区域内至少两个车辆的车辆信息包括:
31、获取当前时刻目标区域内的车道信息;
32、基于所述车道信息和所述至少两个车辆的车辆信息,确定至少一个车道的目标检测区域;
33、基于每个所述目标检测区域,将对应目标检测区域中的待匹配车辆与所述车辆信息进行目标关联。
34、在其中一个实施例中,所述基于每个所述目标检测区域,将对应目标检测区域中的待匹配车辆与所述车辆信息进行目标关联之后包括:
35、基于关联失败车辆的图像,计算当前时刻的关联失败车辆的第一深度特征;基于所述关联失败车辆的历史图像,计算所述关联失败车辆在多个历史时刻保存的第二深度特征;
36、计算所述第一深度特征与每个第二深度特征的余弦距离,得到代价矩阵;
37、获取所述关联失败车辆的预测结果和检测结果,基于所述预测结果与检测结果,计算距离相似度;
38、基于所述距离相似度对所述代价矩阵进行调整;
39、基于匈牙利算法和所述代价矩阵,将关联失败车辆与所述车辆信息进行目标关联。
40、第二个方面,本技术提供了一种车辆跟踪装置,所述装置包括:
41、信息获取模块,用于获取当前时刻目标区域内至少两个车辆的车辆信息;
42、遮挡确定模块,用于基于所述车辆信息,确定受遮挡车辆和所述受遮挡车辆的受遮挡率;
43、速度更新模块,用于基于所述受遮挡车辆的受遮挡率以及受遮挡车辆的第一速度和所述受遮挡车辆周围车辆的第二速度,更新受遮挡车辆的第一速度;
44、信息更新模块,用于基于更新后的所述第一速度,对所述目标区域内至少两个车辆的车辆信息进行重新匹配,更新当前时刻所述至少两个车辆的车辆信息。
45、第三个方面,本技术提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上所述的方法。
46、第四个方面,本技术提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的方法。
47、上述车辆跟踪方法、装置、计算机设备和存储介质,通过获取当前时刻目标区域内至少两个车辆的车辆信息;基于所述车辆信息,确定受遮挡车辆和所述受遮挡车辆的受遮挡率;基于所述受遮挡车辆的受遮挡率以及受遮挡车辆的第一速度和所述受遮挡车辆周围车辆的第二速度,更新受遮挡车辆的第一速度;基于更新后的所述第一速度,对所述目标区域内至少两个车辆的车辆信息进行重新匹配,更新当前时刻所述至少两个车辆的车辆信息,是实现基于车辆的受遮挡情况,对受遮挡车辆的速度进行更新,并基于更新后的速度,对目前区域内的车辆信息进行关联匹配,可以大幅降低在遮挡情况下的车辆信息关联错误的频率,达到提高遮挡情况下车辆跟踪准确率的效果。
- 还没有人留言评论。精彩留言会获得点赞!