一种适用于无人机集群作业任务的实时重归划方法
本发明属于无人机集群,涉及无人机集群的任务规划,具体是一种适用于无人机集群作业任务的实时重归划方法。该方法通过无向图网络建立通讯联系,利用协商推举决策节点机制,变直径自适应聚类算法,聚类中心汇聚算法,任务效能代理模型等技术,实现了无人机集群在节点损失情况下的快速任务重规划,优化无人机集群的作业效率与能量消耗。
背景技术:
1、无人机集群是由多架无人机组成的协同作业系统,可实现比单一无人机更为复杂和广泛的任务,提高了作业效率和可靠性。无人机集群通过通信网络进行信息交换和协同控制,可以根据任务需求和环境变化,动态调整集群规模、结构和行为。无人机集群的一种重要的作业任务是区域覆盖搜索,即让无人机集群按照一定的策略和路径,对指定的区域进行全面的搜索和探测。区域覆盖搜索任务可以应用于军事侦察、灾害救援、环境监测等领域,具有重要的实际意义。
2、无人机集群在执行区域覆盖搜索任务时,需要进行任务规划,即确定无人机集群的目标区域、飞行路径、分配策略等,以实现任务的高效完成。任务规划通常在任务开始前进行,基于无人机集群的初始状态和任务需求,生成一个静态的或预设的任务方案。然而,无人机集群在执行区域覆盖搜索任务过程中,可能面临各种不确定的风险和干扰,导致无法按照既有的任务规划执行任务。例如,无人机集群可能遭受信号屏蔽干扰等,导致部分无人机损失或失联;无人机集群可能因为能量消耗、机械故障、环境变化等原因,导致部分无人机无法继续飞行或执行任务;无人机集群可能因为任务需求或目标区域的变化,导致既有的任务规划不再适用或优化。
3、在这些情况下,无人机集群需要具备抗毁弹性,即在遭受损失或干扰后,仍能保持任务的完成。为了实现抗毁弹性,无人机集群需要进行任务重归划,即根据当前的无人机集群状态和任务需求,重新生成一个新的任务方案,以替代或修正既有的任务规划。任务重归划是无人机集群的一种重要的自适应能力,可以提高无人机集群的任务效率和可靠性,降低无人机集群的能量消耗和风险。传统的无人机集群任务规划方法通常依赖于中心化的控制系统进行任务分配和调度,这种方法在处理简单、预定义的任务时表现良好。然而,在复杂多变的实际应用场景中,中心化控制系统易受到单点故障的影响,一旦控制中心出现问题,整个无人机集群的作业效率和效果将受到严重影响。此外,中心化的任务规划方法在处理大规模无人机集群时,面临着计算资源和通信带宽的巨大挑战,难以满足紧急任务变化下的快速响应需求,这在如灾害救援等时效性关键的应用场景中尤为重要。
4、现有的无人机集群任务重归划方法,要么不能有效地降低集群能量消耗,要么不能及时地响应任务变化,要么不能适应复杂的任务环境,都不能满足无人机集群的实时重归划需求。因此,开发一种既能快速响应任务需求变化、又能有效管理能量消耗,同时适应多变任务环境的无人机集群实时重归划方法,成为了无人机集群技术发展中亟待解决的技术问题。
技术实现思路
1、(一)发明目的
2、针对现有技术中无人机集群在执行区域覆盖搜索任务时面临的实时性和抗毁弹性不足、能量消耗优化不佳以及对复杂环境适应性不强等缺陷和不足,为解决无人机集群在遭遇节点损失或环境变化时,如何快速、高效地进行任务重归划,以保持任务覆盖度、降低能量消耗并提高系统抗毁性的技术问题,本发明旨在提供一种适用于无人机集群作业任务的实时重归划方法。该方法通过无向图网络建立通讯联系、利用协商推举决策节点机制、变直径自适应聚类算法、任务效能代理模型等技术,实现了无人机集群在遭受节点损失或干扰后,能够快速地重新生成新的任务方案,保证任务的完成,同时降低集群的能量消耗和风险。
3、(二)技术方案
4、为实现该发明目的,解决其技术问题,本发明采用如下技术方案:
5、一种适用于无人机集群作业任务的实时重归划方法,所述无人机集群包括多个无人机单机节点并通过无向图网络建立各无人机单机节点之间的通讯联系,且每一无人机单机节点均至少内置有一任务管理模块、一isr模块(intelligence, surveillance, andreconnaissance)和一航路规划模块,其中,所述任务管理模块用以协调无人机单机节点中的各功能模块以确保其按照预定的任务策略和路径执行任务,所述isr模块用以为无人机单机节点提供环境和目标的基础态势信息,所述航路规划模块基于其内置的算法对无人机单机节点进行航路规划,其特征在于,所述实时重归划方法在实施时至少包括如下实施步骤:
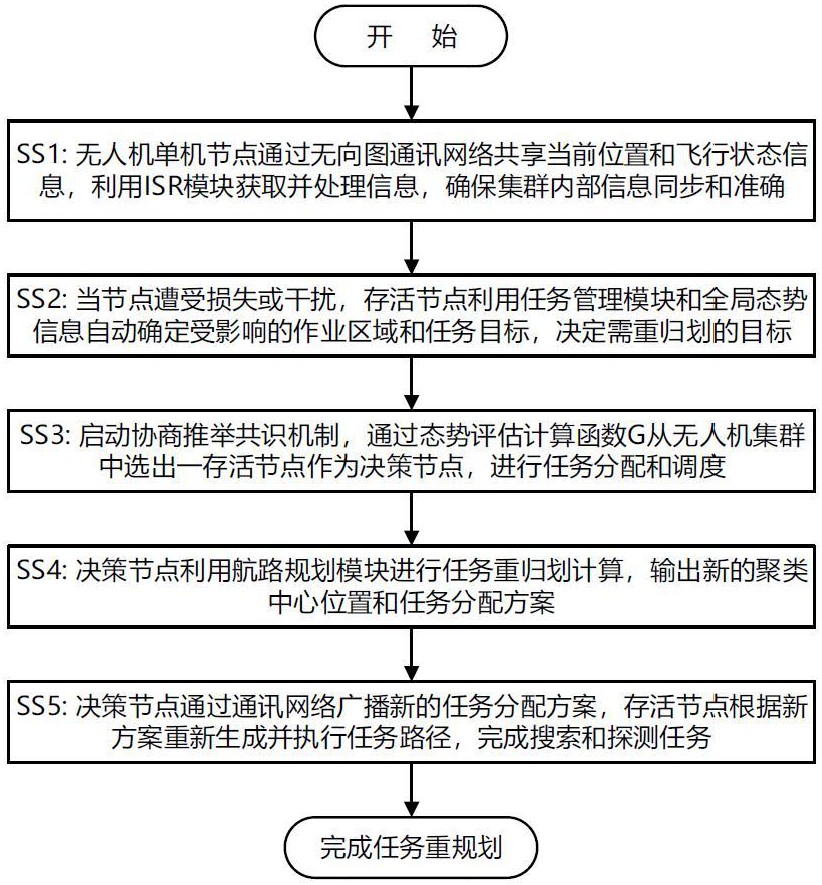
6、ss1. 通过无人机集群中的无向图通讯网络,每一无人机单机节点分享并传递其当前位置和飞行状态信息至其他无人机单机节点,以此建立和更新全局态势感知,其中每一无人机单机节点利用其内置的isr模块获取并处理环境和目标信息,确保无人机集群内部信息的同步和准确性;
7、ss2. 在检测到某一或某些无人机单机节点遭受损失或干扰而无法正常工作时,无人机集群中存活的处于正常工作状态的各无人机单机节点利用其内置的任务管理模块并基于全局态势信息和当前任务进度,自动识别并确定受影响的作业区域和任务目标,以决定需重归划的所有目标;
8、ss3. 启动各存活无人机单机节点内置的任务管理模块中所预设的协商推举共识机制,基于态势评估计算函数 g并通过计算及比较各单机节点的态势评估值,从无人机集群中选出一存活无人机单机节点作为决策节点,所述决策节点用以对步骤ss2所确定的需重归划的所有目标进行任务分配和调度;
9、ss4. 所述决策节点根据所接收的来自集群中各存活无人机单机节点的当前位置信息,并结合预设返回集结点信息以及步骤ss2所确定的待执行任务的目标信息,利用内置的航路规划模块中的变直径自适应聚类算法进行任务重归划计算,计算并输出新的聚类中心位置和任务分配方案;
10、ss5. 所述决策节点的任务管理模块将步骤ss4所输出的新的聚类中心位置和任务分配方案通过无人机集群中的无向图通讯网络广播给集群中的各存活无人机单机节点,各存活无人机单机节点根据所接收的新的聚类中心位置和任务分配方案,利用其内置的航路规划模块重新生成并执行新的任务路径,以完成步骤ss2所确定的需重归划的所有目标的搜索和探测任务。
11、(三)技术效果
12、同现有技术相比,本发明的适用于无人机集群作业任务的实时重归划方法,具有以下有益且显著的技术效果:
13、(1)本发明通过无向图网络建立通讯联系和协商推举决策节点机制,能够在无人机节点损失或通信受到干扰的情况下,快速响应并重新规划任务,确保任务的持续执行。这种快速的响应和重归划能力,显著提高了无人机集群在复杂环境下的稳定性和可靠性,尤其适用于灾害救援、军事侦察等对抗干扰能力要求较高的场景。
14、(2)本发明通过变直径自适应聚类算法,本发明能够根据当前无人机集群的状态和任务需求,动态调整无人机的分组和任务分配,最小化了飞行距离和能量消耗。与传统的中心化控制系统相比,这种方法在处理大规模无人机集群和紧急任务变化时,显示出更高的效率和灵活性。
15、(3)本发明通过采用蚁群优化算法进行航路规划,能够在全局范围内寻找最优的任务执行路径,避免了传统方法中可能出现的局部最优问题。这种全局优化方法不仅提高了任务执行的效率,还进一步降低了能量消耗,尤其适合于需要覆盖广泛区域的搜索和监控任务。
16、(4)本发明采用的无人机集群任务规划方法,不依赖于特定的硬件平台或通信协议,使得系统具有良好的可扩展性和灵活性。这意味着该方法可以容易地应用于不同类型和规模的无人机集群,满足多样化的应用需求。
17、(5)本发明通过实时重归划机制和动态聚类算法,能够快速响应环境变化和任务需求的变化,实时更新任务规划和飞行路径。这种高度的实时性和动态性,使得无人机集群能够更加灵活有效地执行任务,特别适用于时间敏感和环境动态变化的应用场景。
18、(6)本发明的无人机集群作业任务的实时重归划方法,不仅显著提高了无人机集群的抗干扰能力、任务执行效率和能量消耗优化,还增强了系统的适应性、全局优化能力、可扩展性和灵活性,以及任务规划的实时性和动态性,从而为无人机集群的应用提供了一种更加高效、可靠和灵活的解决方案。
- 还没有人留言评论。精彩留言会获得点赞!