一种基于机器视觉的设备图像匹配方法
本发明属于图像处理,具体涉及一种基于机器视觉的设备图像匹配方法。
背景技术:
1、随着高科技信息技术的快速发展,人脸识别技术逐渐往市场化和产品化的方向发展。目前,通过移动设备进行人脸识别的应用越来越广泛(例如进行app登录进行人脸验证),人脸匹配是将采集到人脸与预先获取的人脸进行匹配,从而实现采集到人脸的身份识别,是一种人像识别或面部识别技术。但是在相关技术中发现,由于人脸图像库数量巨大,导致将该用户的人脸图像与人脸图像库中的图像进行匹配的耗费时间长,速度慢。
技术实现思路
1、本发明为了解决以上问题,提出了一种基于机器视觉的设备图像匹配方法。
2、本发明的技术方案是:一种基于机器视觉的设备图像匹配方法包括以下步骤:
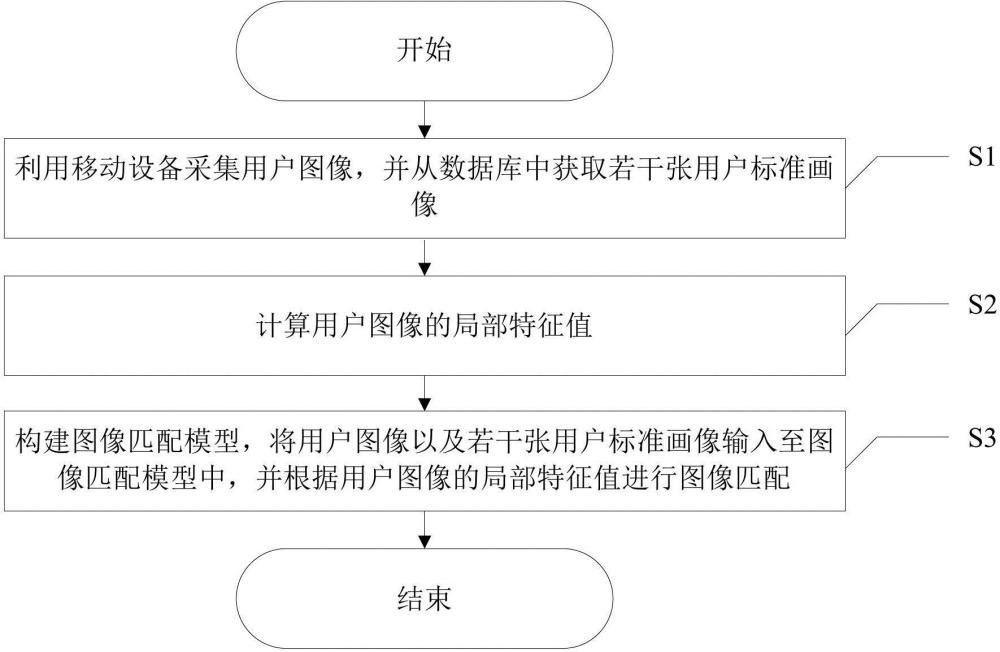
3、s1、利用移动设备采集用户图像,并从数据库中获取若干张用户标准画像;
4、s2、计算用户图像的局部特征值;
5、s3、构建图像匹配模型,将用户图像以及若干张用户标准画像输入至图像匹配模型中,并根据用户图像的局部特征值进行图像匹配。
6、进一步地,s2包括以下子步骤:
7、s21、将用户图像划分为若干个图像块;
8、s22、计算每个图像块的像素分布值;
9、s23、根据每个图像块的像素分布值,确定偏移图像块,将偏移图像块从用户图像中剔除,生成用户局部图像;
10、s24、根据用户局部图像,确定用户图像的局部特征值。
11、上述进一步方案的有益效果是:在本发明中,将用户图像进行分块,根据图像块所包含的所有像素点的像素值均值与整体用户图像最大像素值的关系,确定该图像块的像素分布值;并构建偏移约束条件来筛选偏移图像块,偏移图像块的像素点分布稀疏,不具备较高的参考价值,因此剔除,这样得到的用户局部图像的局部特征值可以反映像素点的像素值情况。
12、进一步地,s22中,图像块的像素分布值的计算公式为:;式中,xk表示图像块中第k个像素点的像素值,k表示图像块的像素点个数,xi表示用户图像中第i个像素点的像素值,max(·)表示最大值运算。
13、进一步地,s23中,确定偏移图像块的具体方法为:构建偏移约束条件,将满足偏移约束条件的图像块作为偏移图像块;其中,偏移图像块的表达式为:;式中,fj表示用户图像中第j个图像块的像素分布值,j表示用户图像的图像块个数,α表示所有图像块的像素分布值的标准差。
14、进一步地,s24中,用户图像的局部特征值t的计算公式为:;式中,j表示用户图像的图像块个数,c表示用户局部图像的图像块个数,exp(·)表示指数函数,xr表示用户局部图像中第r个像素点的像素值,r表示用户局部图像的像素点个数。
15、进一步地,s3包括以下子步骤:
16、s31、构建图像匹配模型,将用户图像以及各张用户标准画像输入至图像匹配模型中,确定每张用户标准画像与用户图像之间的匹配率;
17、s32、判断最大匹配率是否大于0.5,若是则进入s33,否则用户图像的匹配结果为不通过,结束图像匹配;
18、s33、提取最大匹配率对应的用户标准画像的轮廓,作为标准局部画像;
19、s34、根据用户图像的局部特征值,计算标准局部图像与用户图像之间的像素轨迹过渡系数;
20、s35、根据标准局部图像与用户图像之间的像素轨迹过渡系数,确定用户图像是否匹配通过。
21、上述进一步方案的有益效果是:在本发明中,根据多次实验或人为设定像素轨迹过渡阈值,若像素轨迹过渡系数大于像素轨迹过渡阈值,则用户图像匹配通过,否则不通过。
22、利用图像匹配模型对用户图像与多张用户标准画像进行初步筛选,若用户图像与每张用户标准画像的匹配率均小于0.5,则说明数据库中不存在与用户图像相似的标准画像,匹配不通过,否则通过提取最大匹配率的用户标准画像的轮廓,与用户图像进行像素轨迹过渡系数计算,确定用户图像的最终匹配结果。
23、进一步地,s31中,图像匹配模型d的表达式为:;式中,x1表示用户图像中所有像素点的像素值均值,x2表示用户标准画像中所有像素点的像素值均值,β1表示用户图像中所有像素点的像素值方差,β2表示用户标准画像中所有像素点的像素值方差,ε表示极小值。
24、进一步地,s34中,标准局部图像与用户图像之间的像素轨迹过渡系数g的计算公式为:;式中,z1表示用户图像中最大像素值的像素点所在位置,z2表示标准局部图像中最大像素值的像素点所在位置,d(·)表示欧式距离运算,t表示用户图像的局部特征值,ln(·)表示对数函数。
25、可对局部特征值以及欧式距离做归一化处理。
26、本发明的有益效果是:本发明公开了一种基于机器视觉的设备图像匹配方法,对移动设备采集的用户图像进行分块处理,提取包含像素值分布情况的局部特征值;通过构建图像匹配模型,提取用于匹配的最佳用户标准画像,将提取的用户标准画像与用户图像进行分析对比,判断用户图像是否匹配通过,整个过程充分考虑用户图像的像素值情况,保证匹配准确率。
技术特征:
1.一种基于机器视觉的设备图像匹配方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于机器视觉的设备图像匹配方法,其特征在于,所述s2包括以下子步骤:
3.根据权利要求2所述的基于机器视觉的设备图像匹配方法,其特征在于,所述s22中,图像块的像素分布值的计算公式为:;式中,xk表示图像块中第k个像素点的像素值,k表示图像块的像素点个数,xi表示用户图像中第i个像素点的像素值,max(·)表示最大值运算。
4.根据权利要求2所述的基于机器视觉的设备图像匹配方法,其特征在于,所述s23中,确定偏移图像块的具体方法为:构建偏移约束条件,将满足偏移约束条件的图像块作为偏移图像块;其中,偏移图像块的表达式为:;式中,fj表示用户图像中第j个图像块的像素分布值,j表示用户图像的图像块个数,α表示所有图像块的像素分布值的标准差。
5.根据权利要求2所述的基于机器视觉的设备图像匹配方法,其特征在于,所述s24中,用户图像的局部特征值t的计算公式为:;式中,j表示用户图像的图像块个数,c表示用户局部图像的图像块个数,exp(·)表示指数函数,xr表示用户局部图像中第r个像素点的像素值,r表示用户局部图像的像素点个数。
6.根据权利要求1所述的基于机器视觉的设备图像匹配方法,其特征在于,所述s3包括以下子步骤:
7.根据权利要求6所述的基于机器视觉的设备图像匹配方法,其特征在于,所述s31中,图像匹配模型d的表达式为:;式中,x1表示用户图像中所有像素点的像素值均值,x2表示用户标准画像中所有像素点的像素值均值,β1表示用户图像中所有像素点的像素值方差,β2表示用户标准画像中所有像素点的像素值方差,ε表示极小值。
8.根据权利要求6所述的基于机器视觉的设备图像匹配方法,其特征在于,所述s34中,标准局部图像与用户图像之间的像素轨迹过渡系数g的计算公式为:;式中,z1表示用户图像中最大像素值的像素点所在位置,z2表示标准局部图像中最大像素值的像素点所在位置,d(·)表示欧式距离运算,t表示用户图像的局部特征值,ln(·)表示对数函数。
技术总结
本发明公开了一种基于机器视觉的设备图像匹配方法,属于图像处理技术领域,包括以下步骤:S1、利用移动设备采集用户图像,并从数据库中获取若干张用户标准画像;S2、计算用户图像的局部特征值;S3、将用户图像以及若干张用户标准画像输入至图像匹配模型中,并根据用户图像的局部特征值进行图像匹配。本发明公开了一种基于机器视觉的设备图像匹配方法,对移动设备采集的用户图像进行分块处理,提取包含像素值分布情况的局部特征值;通过构建图像匹配模型,提取用于匹配的最佳用户标准画像,将提取的用户标准画像与用户图像进行分析对比,判断用户图像是否匹配通过,整个过程充分考虑用户图像的像素值情况,保证匹配准确率。
技术研发人员:任天猛,王霞
受保护的技术使用者:成都航空职业技术学院
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!