一种多个无人矿卡排土场协同卸载的调度方法及系统
本技术属于矿卡卸载,涉及一种多个无人矿卡排土场协同卸载的调度方法及系统。
背景技术:
1、无人车在卸载区的卸载作业的场景,调度模块需要在车辆入场前提前分配车辆卸载位,路径规划模块根据所分配的排土位信息计算车辆在排土场的入场和出场路线。无人车从入口沿入场路线驶入排土位,完成举斗、卸料、落斗的卸载流程后,沿着出场路线驶出卸载区出口,从而完成一次完整的卸载作业流程。
2、现有技术中,在申请号为202210093841.6的中国专利中,公开了一种外排型排土场的无人调度方法中,通过调度与路径规划子单元仅仅是采用单车最小等待时间作为调度准则,在卸载区入口等待的车辆按照顺序依次调度至预计等待时间最短的卸载位,将车辆在排土场与破碎站的作业调度按照一类卸载区调度问题处理,忽略了排土场调度场景存在多车在同一个空间内协同工作,缺乏对多个车辆在同一个排土场协同作业冲突的考虑,采用传统方法只能允许一辆车在排土场作业,无法解决多个无人车在排土场协同作业的调度问题。
3、因此,目前缺少一种能够在卸载区多矿卡排土场协同卸载的调度的方法。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、为了解决相关技术中存在的问题,本公开实施例提供了多个无人矿卡排土场协同卸载的调度方法及系统,用以解决现有技术中多个无人车在排土场协同作业的调度问题。
3、在一些实施例中,提供了一种多个无人矿卡排土场协同卸载的调度方法,所述方法包括:
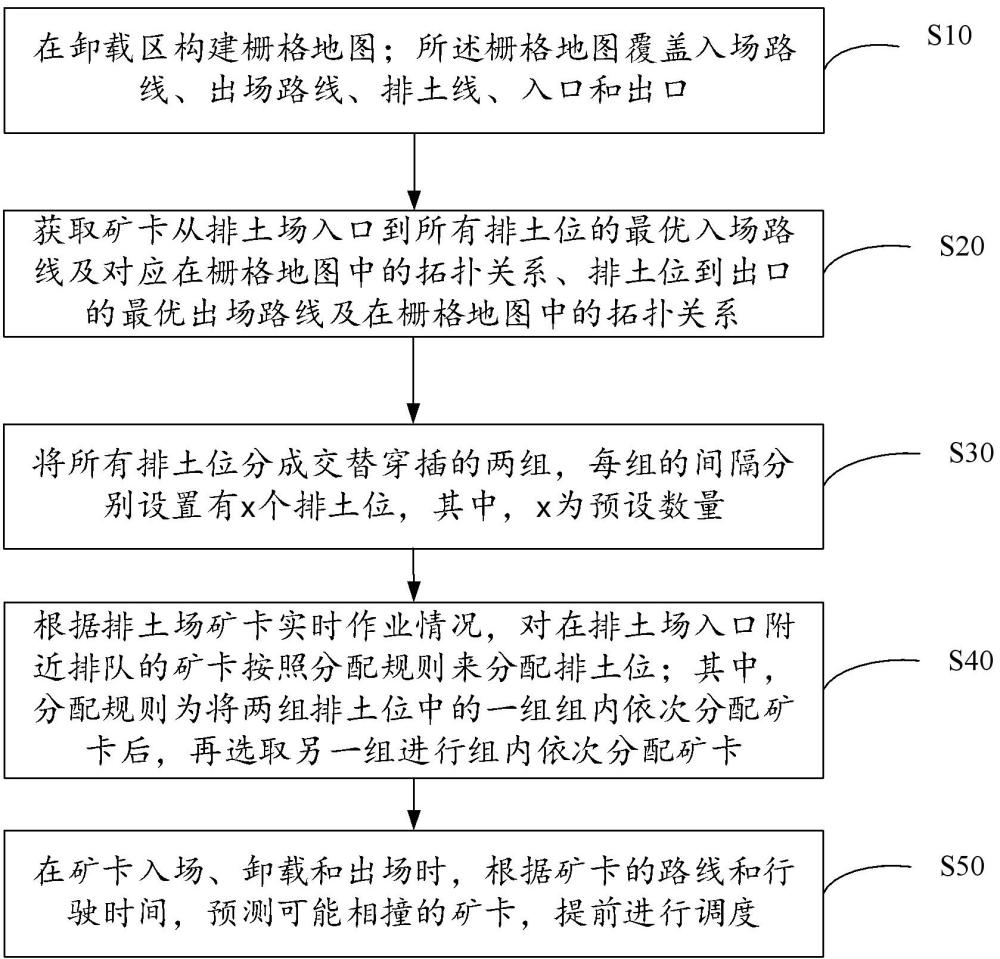
4、s10,在卸载区构建栅格地图;所述栅格地图覆盖入场路线、出场路线、排土线、入口和出口;
5、s20,获取矿卡从排土场入口到所有排土位的最优入场路线及对应在栅格地图中的拓扑关系、排土位到出口的最优出场路线及在栅格地图中的拓扑关系;
6、s30,将所有排土位分成交替穿插的两组,每组的间隔分别设置有x个排土位,其中,x为预设数量;
7、s40,根据排土场矿卡实时作业情况,对在排土场入口附近排队的矿卡按照分配规则来分配排土位;其中,分配规则为将两组排土位中的一组组内依次分配矿卡后,再选取另一组进行组内依次分配矿卡;
8、s50,在矿卡入场、卸载和出场时,根据矿卡的路线和行驶时间,预测可能相撞的矿卡,提前进行调度。
9、优选地,s40中的分配规则为将两组排土位中的一组组内依次分配矿卡后,再选取另一组进行组内依次分配矿卡,包括:
10、s41,获取卸载区内矿卡的实时任务执行情况,对排土位的占用状态进行标记:0=空闲,表示此次分组调度无矿卡分配对应排土位;1=正在占用,表示此次分组调度存在矿卡分配对应排土位并处于卸载阶段;2=完成卸载,表示此次分组调度已有矿卡分配对应排土位并已完成卸载,若此次分组调度结束且推土处理后则重新置于0;3=正在驶入,表示此次分组调度存在矿卡分配对应排土位并处于入场阶段;
11、s42,为矿卡选择调度分组,判断是否存在正在进行的调度分组;
12、若存在且对应分组排土位的无占用状态为0,则结束对应分组,选择另一分组;
13、若存在且存在排土位的占用状态为0,则继续选择对应分组;
14、若不存在正在进行的调度分组,则选择离入口最近的分组;
15、s43,组内选择排土位,将组内排土位信息按照离入口距离由远到近排列为有序数组,从后到前遍历排土位搜索目标点位,若搜索排土位占用状态=0,2,则,继续向前遍历,并记录最新搜索到占用状态=0的排土位;直到占用状态=1,3或=1,则选择作为当前矿卡所选排土位,并置占用状态=1。
16、优选地,s50的在矿卡入场、卸载和出场时,根据矿卡的路线和行驶时间,预测可能相撞的矿卡,提前进行调度,包括:
17、s51,将占用状态=1的最近、最远卸载点位之间的入场主路设置为禁停区,在禁停区前设立临界区;
18、s52,根据矿卡实时所在节点预测到达各节点的时间,若多个矿卡到任意达一个节点时间重合,则判定对应节点为潜在的路线冲突位置,重合的时间为潜在冲突时间;
19、s53,根据多车的入场和出场的情况,进行调度。
20、优选地,拓扑关系用栅格地图上起始节点、终止节点和预计行驶时长的三个元素来表示。
21、优选地,(起始节点、终止节点和预计行驶时长)表示栅格地图上的一个时间上的拓扑关系路线;
22、拓扑关系路线表示为[(v1,v2,t1),(v2,v3,t2),…,(vi,vi+1,ti),…,(vn-1,vn,tn-1)],ti表示若矿卡从节点vi到节点vi+1的预计行驶时间;
23、矿卡当前时间加上vi到vn之间所有的节点之间的预测行驶时间之和,作为矿卡到达vn的时间。
24、优选地,s53中的根据多车的入场和出场的情况,进行调度,包括:
25、根据多车的入场出场的情况进行分类,分类为多车入场调度管理、多车入场出场调度管理、多车出场调度管理;
26、若分类为多车入场调度管理,则执行判断当前入场矿卡和前车是否存在多车入场路线冲突、入场和卸载任务冲突、卸载任务冲突;若存在,则当前入场矿卡在禁停区前停车,后车排队停车;若不存在,则继续;
27、若分类为多车入场出场调度管理,则执行判断入场矿卡和前车出场矿卡是否存在路线冲突:
28、若不存在,则入场矿卡沿着入场路线继续行驶;
29、若存在,则进一步视情况制定任务优先级:
30、若入场矿卡已处于临界区,则进入临界区的入场矿卡任务优先级大于出场矿卡,继续执行入场任务;其他未进入临界区的矿卡于外停车;出场矿卡在禁停区外停车;不经过禁停区的车没有影响,继续行驶;
31、若无入场矿卡处于临界区,则出场矿卡任务优先级大于入场矿卡优先级,出场矿卡按照执行多车出场调度管理,入场矿卡在禁停区前停车;不经过禁停区的车没有影响,继续行驶;
32、若分类多车出场调度管理,则执行判断完成卸载任务的矿卡出场路线是否冲突:
33、若不存在,则出场矿卡沿着出场路线汇入出场主路跟车行驶;
34、若存在,则先行者优先汇入出场主路,后行者避让先行者,包括在后行者进入冲突点前设置停止线,确保出场路线互斥。
35、优选地,x的数量为1。
36、在一些实施例中,公开了一种多矿卡排土场协同卸载的调度系统,包括:
37、构建栅格地图模块,用于在卸载区构建栅格地图;所述栅格地图覆盖入场路线、出场路线、排土线、入口和出口;
38、建立拓扑关系模块,用于获取矿卡从排土场入口到所有排土位的最优入场路线及对应在栅格地图中的拓扑关系、排土位到出口的最优出场路线及在栅格地图中的拓扑关系;
39、排土位分组模块,用于将所有排土位分成交替穿插的两组,每组的间隔分别设置有x个排土位,其中,x为预设数量;
40、分配排土位模块,用于根据排土场矿卡实时作业情况,对在排土场入口附近排队的矿卡按照分配规则来分配排土位;其中,分配规则为将两组排土位中的一组组内依次分配矿卡后,再选取另一组进行组内依次分配矿卡;
41、调度模块,用于在矿卡入场、卸载和出场时,根据矿卡的路线和行驶时间,预测可能相撞的矿卡,提前进行调度。
42、本公开实施例提供的一种多个无人矿卡排土场协同卸载的调度方法及系统,可以实现以下技术效果:
43、为了保证已分配排土位的多个无人车在排土场安全有效执行任务,本发明实时识别场内多车协同执行任务过程中潜在发生的冲突位置及冲突类型,并基于不同的冲突设计对应的冲突解决策略,从而完成对已分配排土位的矿卡入场、卸载和出场任务进行调度管理。
44、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!