用于机动车辆的视觉系统和方法与流程
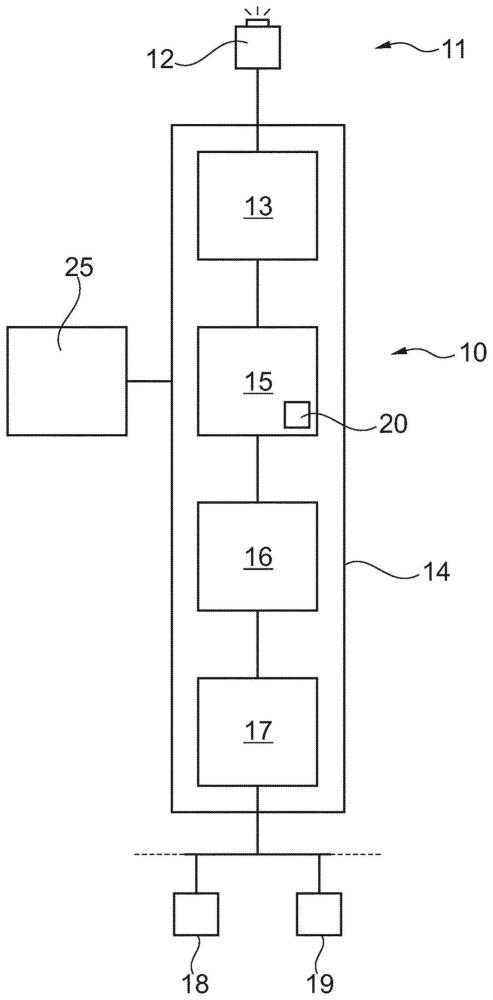
本发明涉及用于机动车辆的视觉系统,该视觉系统包括成像系统和数据处理装置,该成像系统适于捕捉机动车辆周围的图像,该数据处理装置建立对象检测器,该对象检测器适于通过图像处理对所述成像系统捕捉到的图像中的对象进行检测。此外,本发明涉及用于机动车辆的视觉方法。
背景技术:
1、例如wo 2008 057042 a1中已知这种类型的视觉系统。这种视觉系统通常适于检测行人、自行车、大型动物和/或其他车辆,特别是以便于避免与这些对象碰撞。
技术实现思路
1、本发明的问题在于,特别在另一车辆可能横穿的场景中,提供具有改进性能的用于机动车辆的视觉系统和方法。
2、本发明通过独立权利要求的特征解决了这个问题。本发明使用车轮检测器检测所捕捉的图像中的另一车辆的车轮、轮状结构或其特征部分。在此,与检测整个车辆相比,单独(即,以分离的方式)对车轮进行检测。通常,本发明的车轮检测器提供了与包括车轮的对象(即,其他车辆)有关的附加信息,这可以提高检测的准确性和可靠性并且避免碰撞。具体地,车轮检测器允许独立地并且与该车辆其余部分的大小和位置无关地确定该车轮的确切大小和位置,而如果将另一车辆仅作为整体来确定,则这通常是不可能的。另一车辆的车轮的确切大小和位置提供了有价值的附加信息,这将在下文中更详细地阐明。
3、优选地,车轮检测器与适于对另一车辆的非车轮部分进行检测和/或分类的非车轮检测器相结合,以便获得附加信息。非车轮检测器可以例如是行人或骑自行车者检测器,或对象分割器,如下文将阐明的那样。优选地,车轮检测器的搜索区域限于检测到的非车轮部分的附近,或者非车轮检测器的搜索区域限于检测到的车轮的附近。以这种方式,相应的搜索区域不必是完整的图像,而可以明显更小,这可以节省处理资源并且可以导致更快的对象检测。
4、在本发明的优选实施例中,该另一车辆是自行车,即本发明用于自行车检测和/或分类。为了对骑自行车者进行检测和/或分类,特别是在使用单目相机时,尤其是在横穿情形中时,需要追踪包括车轮、优选地还包括车架的整个自行车。例如,为了通过使用自动紧急制动来减轻自行车损伤,重要的是不仅要考虑避免撞到骑自行车者,而且还要避免撞击自行车的前轮或后轮。这可以通过根据本发明的车轮检测来实现。
5、优选地,车轮检测可以与行人检测器结合使用,以将对象分类为骑自行车者或自行车,并且改进对由骑自行车者所占据的空间的追踪。在该实施例中,行人检测器形成先前提到的非车轮部分检测器。
6、本发明的另一个优选应用是使用单目或立体成像系统对横穿机动车辆(特别是汽车、摩托车、卡车或公共汽车)进行检测和/或分类。在此应用中,根据本发明的车轮检测器有利地与例如基于光流的通用对象分割结合使用,以能够将检测到的对象分类为机动车辆。在此实施例中,对象分割器形成先前提到的非车轮部分检测器。
7、该车轮检测器优选地使用圆形或椭圆形检测算法,这是由于当在车辆横穿场景中观察时,车轮看起来呈圆形或更一般地呈椭圆形。在优选的实际实施例中,车轮检测器使用霍夫变换算法。然而,也可以是其他形式的车轮检测器;例如,车轮检测可以基于车轮分类器。通常,车轮检测可以优选地基于或包括车轮的轮胎检测、轮辋检测、轮辐检测和/或轮毂检测的任何合适的组合。
8、如上所述,本发明在横穿场景中特别有益。横穿场景是如下场景:另一车辆特别地以30°(优选45°)与90°之间的角度横穿或即将横穿本车辆的路径,其中,该另一车辆的车轮可视为圆形或椭圆的。
9、本发明的一个优点在于其可以用于提高位置精度,特别是在距离估计是已知弱点的单目相机系统中。通常,检测到的车轮可以优选地用于被检测对象的位置和/或距离估计。这基于以下发现:车轮通常是车辆在地面上所处的位置的非常好的参照,这将在下面更详细地阐明。
技术特征:
1.一种用于数据处理的装置,包括:
2.根据权利要求1所述的装置,其中,所述处理器被配置为检测至少一对车轮,并且其中,所述处理器被配置为基于所述至少一对车轮相对于彼此布置在典型的距离和位置处来确定所述至少一对车轮是否与自行车相关联。
3.根据权利要求2所述的装置,其中,检测所述至少一对车轮包括检测每个车轮的大小和位置。
4.根据权利要求1所述的装置,其中,所述处理器被配置为基于对象分割过程来确定所述至少一个车轮是否与机动车辆相关联。
5.根据权利要求4所述的装置,其中,所述对象分割过程是基于光流的。
6.根据权利要求1所述的装置,其中,所述信号包括光学、声学和/或触觉警告。
7.根据权利要求6所述的装置,其中,所述信号还包括制动信号。
8.根据权利要求1所述的装置,其中,所述处理器被配置为基于限于与检测到的行人相关联的附近的搜索区域来确定所述图像数据包括所述至少一个车轮。
9.根据权利要求1所述的装置,其中,所述成像系统包括相机。
10.根据权利要求9所述的装置,其中,所述成像系统由单相机组成。
11.根据权利要求9所述的装置,还包括所述相机。
12.根据权利要求1所述的装置,其中,所述碰撞概率是基于所述车辆与所述骑自行车者或所述机动车辆之间的距离估计的。
13.根据权利要求12所述的装置,其中,所述距离是基于与所述至少一个车轮相关联的地面的。
14.根据权利要求9所述的装置,其中,所述装置包括所述车辆。
15.根据权利要求1所述的装置,其中,确定所述至少一个车轮是否与自行车相关联包括独立于对所述行人的检测来检测所述至少一个车轮。
16.根据权利要求15所述的装置,其中,对所述至少一个车轮的检测是在对所述行人的检测之后执行的。
17.根据权利要求15所述的装置,其中,对所述至少一个车轮的检测是在对所述行人的检测期间执行的。
18.一种用于数据处理的方法,包括:
19.根据权利要求18所述的方法,其中,检测所述至少一个车轮包括检测至少一对车轮,并且其中,确定所述至少一个车轮是否与自行车相关联包括:基于所述至少一对车轮相对于彼此布置在典型的距离和位置处来确定所述至少一对车轮是否与自行车相关联。
20.根据权利要求19所述的方法,其中,检测所述至少一对车轮包括检测每个车轮的大小和位置。
21.根据权利要求18所述的方法,其中,确定所述至少一个车轮是否与机动车辆相关联包括:基于对象分割过程来确定所述至少一个车轮是否与机动车辆相关联。
22.根据权利要求21所述的方法,其中,所述对象分割过程是基于光流的。
23.根据权利要求18所述的方法,其中,所述信号包括光学、声学和/或触觉警告。
24.根据权利要求23所述的方法,其中,所述信号还包括制动信号。
25.根据权利要求18所述的方法,其中,处理所述图像数据以检测所述至少一个车轮包括:基于限于与检测到的行人相关联的附近的搜索区域来确定所述图像数据包括所述至少一个车轮。
26.根据权利要求18所述的方法,其中,所述碰撞概率是基于所述车辆与所述骑自行车者或所述机动车辆之间的距离估计的。
27.根据权利要求26所述的方法,其中,所述距离是基于与所述至少一个车轮相关联的地面的。
28.根据权利要求18所述的方法,其中,确定所述至少一个车轮是否与自行车相关联包括独立于对所述行人的检测来检测所述至少一个车轮。
29.根据权利要求28所述的方法,其中,对所述至少一个车轮的检测是在对所述行人的检测之后执行的。
30.根据权利要求28所述的方法,其中,对所述至少一个车轮的检测是在对所述行人的检测期间执行的。
31.一种用于图像处理的系统,包括:
32.根据权利要求31所述的系统,其中,所述多个成像装置在可见波长范围和/或红外波长范围内操作。
33.根据权利要求31所述的系统,其中,所述多个图像包括成对的左右图像;并且
34.一种用于图像处理的方法,包括:
35.根据权利要求34所述的方法,其中,所述多个成像装置在可见波长范围和/或红外波长范围内操作。
36.根据权利要求34所述的方法,其中,所述多个图像包括成对的左右图像;并且
技术总结
本公开内容的实施例提供了用于数据处理的装置和方法。该装置包括:存储器;以及耦合到存储器的处理器,处理器被配置为:控制成像系统以从车辆的周围捕获图像数据;接收图像数据;处理图像数据以检测至少一个车轮,其中,至少一个车轮是在不检测与车轮相关联的完整车辆的情况下以分离的方式检测的;确定至少一个车轮是否与骑自行车者或机动车辆相关联,其中,处理器被配置为基于对图像数据中的行人的检测以及所检测到的行人与至少一个车轮之间的距离来确定至少一个车轮是否与自行车相关联;估计与骑自行车者或机动车辆相关联的碰撞概率;以及基于所估计的碰撞概率来输出信号。
技术研发人员:彼得·哈尔
受保护的技术使用者:安致尔软件公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!