一种工件配准方法、装置、计算机设备及存储介质与流程
本发明涉及工件配准,具体涉及一种工件配准方法、装置、计算机设备及存储介质。
背景技术:
1、在生产制造领域,为了能够对工件进行精确加工或装配等,往往需要采用工件配准技术对工件进行精确定位。例如,在对工件进行加工的过程中,可以利用图像采集设备采集工件的图像,将采集的图像与工件模型进行配准,工业机器人可以基于配准后的图像进行工件焊接等操作。
2、然而,对于一些大型工件,由于工件尺寸较大,采用传统的配准技术,其配准精度较低。
技术实现思路
1、有鉴于此,本发明提供了一种工件配准方法、装置、计算机设备及存储介质,以解决现有技术中工件配准精度较低的问题。
2、第一方面,本发明提供了一种工件配准方法,该方法包括:
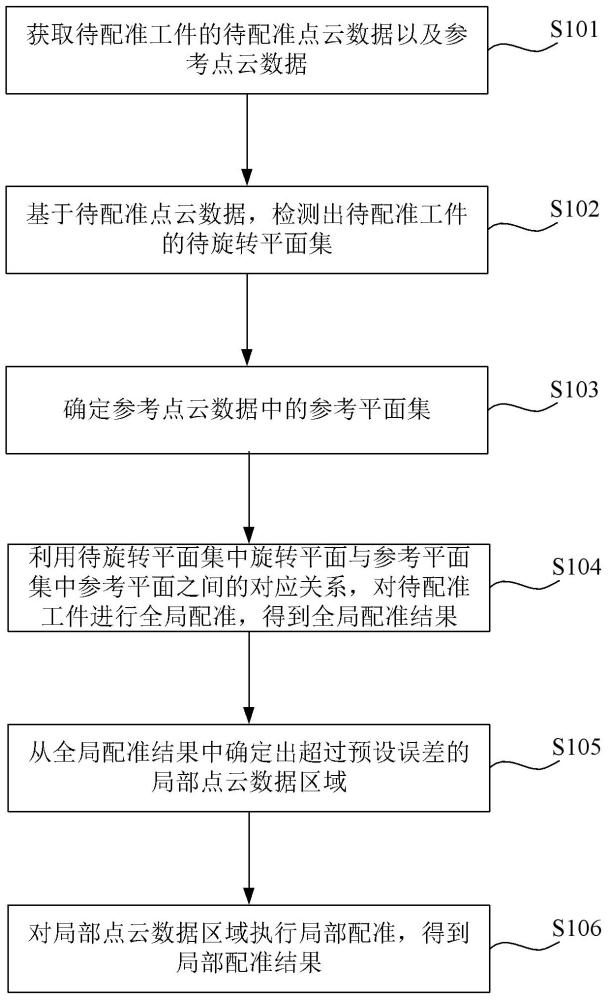
3、获取待配准工件的待配准点云数据以及参考点云数据;
4、基于待配准点云数据,检测出待配准工件的待旋转平面集;
5、确定参考点云数据中的参考平面集,其中,参考平面集中的参考平面与旋转平面集中的旋转平面一一对应,参考平面一一对应的旋转平面为待配准工件上的同一平面;
6、利用待旋转平面集中旋转平面与参考平面集中参考平面之间的对应关系,对待配准工件进行全局配准,得到全局配准结果;
7、从全局配准结果中确定出超过预设误差的局部点云数据区域;
8、对局部点云数据区域执行局部配准,得到局部配准结果。
9、在全局配准阶段使用平面检测并旋转获得的初始位置信息具有一定的鲁棒性,能够处理一些复杂的场景。同时,平面检测可以用于减少待配准点云数据中的数据量,提取出主要的结构信息,从而减小后续配准过程的计算复杂性。平面检测还可以识别场景中的平面结构,这些结构通常是稳定的特征,通过处理平面结构,可以将点云的维度减少到更容易处理的子集,减少数据量。且基于全局加局部的配准方式,有利于提高定位精确性,提高待配准工件的加工精度,总体而言,这种综合利用全局结构信息和局部微调的配准策略能够在不同的点云场景中取得较好的配准效果。
10、在一种可选的实施方式中,利用待旋转平面集中旋转平面与参考平面集中参考平面之间的对应关系,对待配准工件进行全局配准,得到全局配准结果,包括:
11、将旋转平面旋转至与旋转平面一一对应的参考平面;
12、在旋转平面旋转结束后,将旋转后的旋转平面与一一对应的参考平面进行迭代最近点配准,其中,每一个旋转平面旋转结束后均进行一次迭代最近点配准;
13、将所有迭代最近点配准结果中误差最小的配准结果,再次进行迭代最近点配准,获得全局配准结果。
14、为了进一步提高基于平面旋转的配准矩阵的准确性,采用了icp配准方法进行微调,有助于避免配准结果发生大尺度的偏移,提高后续配准的速度和稳定性。进一步地,当利用旋转加icp获得较好的初始位置之后,采用icp进一步来优化待配准点云数据的初始位置,有效的降低了icp出现局部最优的问题。采用平面旋转加icp的全局配准方式,还在一定程度上减少了程序的执行时间。
15、在一种可选的实施方式中,对局部点云数据区域执行局部配准,得到局部配准结果,包括:
16、重新拍摄待配准工件,获得与局部点云数据区域对应的新局部点云数据;
17、基于全局配准结果与新局部点云数据,确定局部配准结果。
18、采用平面检测加icp的配准方式作为粗配准结果,将粗配准结果应用到局部配准中优化了全局配准效果。
19、在一种可选的实施方式中,获得与局部点云数据区域对应的新局部点云数据,包括:
20、从重新拍摄的待配准工件的图像中框选出与局部点云数据区域对应的最大包围框;
21、基于最大包围框,从重新拍摄的待配准工件的图像裁剪出新局部点云数据。
22、在一种可选的实施方式中,基于全局配准结果与新局部点云数据,确定局部配准结果,包括:
23、将全局配准结果、新局部点云数据以及参考点云数据均转换至同一基坐标系下;
24、将基坐标系下的全局配准结果、新局部点云数据以及参考点云数据进行迭代最近点配准,获得局部配准结果。
25、综合利用全局结构信息和局部微调的配准策略能够在不同的点云场景中取得较好的配准效果,有效提高了配准精度。
26、在一种可选的实施方式中,基于待配准点云数据,检测出待配准工件的待旋转平面集,包括:
27、基于待配准点云数据,确定出待配准点云数据中的第一最大平面;
28、根据第一最大平面,确定出与第一最大平面垂直的第二最大平面;
29、将第一最大平面与第二最大平面封装为待旋转平面集。
30、在一种可选的实施方式中,基于待配准点云数据,确定出待配准点云数据中的第一最大平面,包括:
31、步骤s1,从待配准点云数据中确定出三个配准点,计算三个配准点对应的平面参数,其中平面参数包括θ、φ、ρ,其中,φ为平面的法向量与z轴之间的夹角,θ为平面的法向量在x、y平面上的投影与x轴之间的夹角,ρ表示坐标原点到平面的距离;
32、步骤s2,遍历待配准点云数据,对每个满足平面参数的三个点进行一次投票;
33、步骤s3,确定遍历后投票数量最多的检测平面,并删除投票点;
34、重复执行上述步骤s1至步骤s3,直至剩余预设比例的待配准点云数据的点云数量时停止检测;
35、获取每次遍历后确定的检测平面,从多个检测平面确定出第一最大平面,其中,第一最大平面为包含待配准点云数据最多的平面。
36、这样检测确定出的平面,有助于提高初始位置的准确性,进而可以提高全局配准的准确性。
37、第二方面,本发明提供了一种工件配准装置,装置包括:
38、获取模块,用于获取待配准工件的待配准点云数据以及参考点云数据;
39、检测模块,用于基于待配准点云数据,检测出待配准工件的待旋转平面集;
40、确定模块,用于确定参考点云数据中的参考平面集,其中,参考平面集中的参考平面与旋转平面集中的旋转平面一一对应,参考平面一一对应的旋转平面为待配准工件上的同一平面;
41、全局配准模块,用于利用待旋转平面集中旋转平面与参考平面集中参考平面之间的对应关系,对待配准工件进行全局配准,得到全局配准结果;
42、误差模块,用于从全局配准结果中确定出超过预设误差的局部点云数据区域;
43、局部配准模块,用于对局部点云数据区域执行局部配准,得到局部配准结果。
44、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的工件配准方法。
45、第四方面,本发明提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的工件配准方法。
46、需要说明的是,由于本发明提供的工件配准装置,电子设备以及计算机可读存储介质与上述的工件配准方法是对应的。因此,关于工件配准装置,计算机设备以及计算机可读存储介质的有益效果,请参见上文工件配准方法的对应有益效果的描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!