一种基于计算机视觉的齿轮表面损伤检测方法与流程
本发明涉及图像数据处理,具体涉及一种基于计算机视觉的齿轮表面损伤检测方法。
背景技术:
1、齿轮作为一种高精度物理机械结构,其质量直接影响整个机械设备的寿命,而齿轮表面损伤影响齿轮的使用寿命和性能。因此,需要对齿轮表面损伤进行检测,齿轮表面损伤一般为划痕、点蚀、磨损、疲劳裂纹、腐蚀等。在对齿轮表面损伤进行检测时,通过分析拍摄的齿轮表面的图像信息,判断齿轮表面的损伤情况。
2、现有利用连通图动态分裂聚类算法对获取的图像信息进行簇类划分,将存在相同分布特征的像素点划分到同一簇类中,分析簇类中的像素点的分布情况可以判断齿轮表面的损伤情况。连通图动态分裂聚类算法在构建连通图时,需要确定构建连通图的节点数据,现有算法直接将图像中的像素点作为节点数据,无法体现出损伤区域的结构性分布,导致损伤缺陷性质的簇类中存在正常像素点,基于簇类实现的齿轮表面损伤检测存在偏差;同时,由于图像中像素点位置信息是固定的,其将导致所构建的连通图中信息混乱,进一步影响簇类划分的准确性,造成后续对齿轮表面损伤检测产生误差。
技术实现思路
1、为了解决上述利用连通图动态分裂聚类算法对获取的图像进行簇类划分时,将像素点作为构建连通图时的节点导致簇类划分结果不准确,促使后续对齿轮表面损伤检测产生误差的技术问题,本发明的目的在于提供一种基于计算机视觉的齿轮表面损伤检测方法,所采用的技术方案具体如下:
2、本发明一个实施例提供了一种基于计算机视觉的齿轮表面损伤检测方法,该方法包括以下步骤:
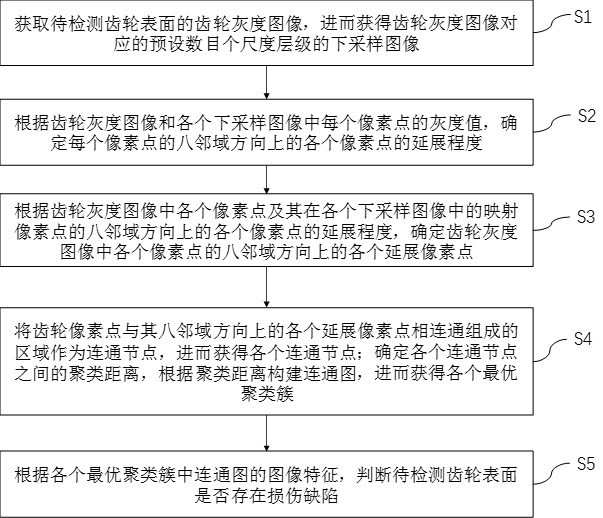
3、获取待检测齿轮表面的齿轮灰度图像,进而获得齿轮灰度图像对应的预设数目个尺度层级的下采样图像;
4、根据待分析图像中每个像素点的灰度值,分析每个像素点的预设窗口区域与其八邻域方向上像素点的预设窗口区域之间的灰度分布相似情况,确定每个像素点的八邻域方向上的各个像素点的延展程度;其中,待分析图像为齿轮灰度图像或各个下采样图像;
5、将齿轮灰度图像中的任意一个像素点作为齿轮像素点,确定齿轮像素点在各个下采样图像中的映射像素点;根据齿轮像素点及其对应的各个映射像素点的八邻域方向上的各个像素点的延展程度,分析延展稳定性,确定齿轮像素点的八邻域方向上的各个延展像素点;
6、将齿轮像素点与其八邻域方向上的各个延展像素点相连通组成的区域作为连通节点,进而获得各个连通节点;确定各个连通节点之间的聚类距离,根据聚类距离构建连通图,进而获得各个最优聚类簇;
7、根据各个最优聚类簇中连通图的图像特征,判断待检测齿轮表面是否存在损伤缺陷。
8、进一步地,所述根据待分析图像中每个像素点的灰度值,分析每个像素点的预设窗口区域与其八邻域方向上像素点的预设窗口区域之间的灰度分布相似情况,确定每个像素点的八邻域方向上的各个像素点的延展程度,包括:
9、以待分析图像中的每个像素点为中心点,构建预设尺寸的窗口区域,将预设尺寸的窗口区域作为预设窗口区域,获得待分析图像中的每个像素点的预设窗口区域;
10、对于待分析图像中的任意一个像素点,根据像素点和像素点的预设窗口区域中各个邻域像素点的灰度值,确定像素点的各个灰度变化幅值;其中,邻域像素点是预设窗口区域中除中心点以外的其他像素点;
11、将八邻域方向的任意一个方向作为目标方向,将像素点的目标方向上的像素点作为初始待延展像素点;计算像素点的任意一个灰度变化幅值与任意一个初始待延展像素点的各个灰度变化幅值之间的差异,确定最小差异,将像素点对应的各个最小差异的累加和作为像素点的目标方向上的对应像素点的延展程度。
12、进一步地,所述根据像素点和像素点的预设窗口区域中各个邻域像素点的灰度值,确定像素点的各个灰度变化幅值,包括:
13、对于预设窗口区域中任意一个邻域像素点,计算像素点和该邻域像素点之间的灰度值差异;确定像素点和该邻域像素点之间的连线与水平方向的夹角,进而计算夹角的余弦值;将所述灰度值差异与所述夹角的余弦值的乘积作为像素点的灰度变化幅值。
14、进一步地,所述根据齿轮像素点及其对应的各个映射像素点的八邻域方向上的各个像素点的延展程度,分析延展稳定性,确定齿轮像素点的八邻域方向上的各个延展像素点,包括:
15、分别统计齿轮像素点的目标方向上初始待延展像素点的个数以及齿轮像素点对应的各个映射像素点的目标方向上初始待延展像素点的个数,确定最小初始待延展像素点个数为延展分析数目;在待分析像素点的目标方向上选取所述延展分析数目个、且距离待分析像素点最近的初始待延展像素点作为目标待延展像素点;其中,待分析像素点为齿轮像素点或齿轮像素点对应的各个映射像素点;
16、计算齿轮像素点的目标方向上各个目标待延展像素点的延展评估指标;根据目标待延展像素点与齿轮像素点的距离按照从小到大顺序,依次判断目标待延展像素点的延展评估指标是否大于预设延展阈值,直至出现延展评估指标不大于预设延展阈值的目标待延展像素点,将当前延展评估指标大于预设延展阈值的目标待延展像素点作为齿轮像素点的目标方向上的延展像素点。
17、进一步地,所述计算齿轮像素点的目标方向上各个目标待延展像素点的延展评估指标,包括:
18、对于任意一个目标待延展像素点,计算齿轮像素点的目标方向上目标待延展像素点的延展程度与齿轮像素点对应的各个映射像素点的目标方向上目标待延展像素点的延展程度之间的差异的累加和;对所述差异的累加和进行反比例的归一化处理,获得齿轮像素点的目标方向上目标待延展像素点的延展评估指标。
19、进一步地,确定各个连通节点之间的聚类距离,包括:
20、对于任意两个连通节点,根据两个连通节点中每个像素点与其八邻域像素点的灰度方差,确定两个连通节点的灰度变化程度;
21、根据两个连通节点的中心点的位置确定两个连通节点的中心点之间的距离,确定两个连通节点对应的最大面积值,将两个连通节点的中心点之间的距离与最大面积值的比值作为两个连通节点之间的规整距离;
22、统计两个连通节点的中心点连线所经过的连通节点个数,对两个连通节点的中心点与中心点连线所经过的连通节点的中心点进行曲线拟合获得拟合曲线,计算拟合曲线上所有像素点的斜率方差,将所述连通节点个数与所述斜率方差的乘积作为两个连通节点之间的连通程度;
23、结合两个连通节点的灰度变化程度、规整距离和连通程度,获得两个连通节点之间的聚类距离。
24、进一步地,所述根据两个连通节点中每个像素点与其八邻域像素点的灰度方差,确定两个连通节点的灰度变化程度,包括:
25、对于任意一个连通节点,计算连通节点中任意一个像素点与其八邻域像素点的灰度方差与所有像素点与其八邻域像素点的灰度方差的平均值之间的差异,记为灰度方差差异;将连通节点中每个像素点的灰度方差差异的平均值作为连通节点的灰度变化程度。
26、进一步地,所述根据各个最优聚类簇中连通图的图像特征,判断待检测齿轮表面是否存在损伤缺陷,包括:
27、根据各个最优聚类簇中连通图的灰度方差、周长和面积,确定各个最优聚类簇的损伤程度;若任意一个最优聚类簇的损伤程度大于预设损伤阈值,则判定待检测齿轮表面存在损伤缺陷,否则,判定待检测齿轮表面不存在损伤缺陷。
28、进一步地,所述根据各个最优聚类簇中连通图的灰度方差、周长和面积,确定各个最优聚类簇的损伤程度,包括:
29、对于任意一个最优聚类簇,计算最优聚类簇中连通图的周长和面积的比值,进而计算所述比值与灰度方差的乘积,然后将比值与灰度方差的乘积作为第一乘积;对最优聚类簇中连通图的第一乘积进行归一化处理,将归一化处理后的数值作为最优聚类簇的损伤程度。
30、进一步地,所述获得齿轮灰度图像对应的预设数目个尺度层级的下采样图像,包括:
31、设置预设数目个尺度层级,利用高斯金字塔对齿轮灰度图像进行下采样处理,获得齿轮灰度图像对应的预设数目个尺度层级的下采样图像。
32、本发明具有如下有益效果:
33、本发明提供了一种基于计算机视觉的齿轮表面损伤检测方法,该检测方法利用连通图动态分裂聚类算法对获取的图像进行簇类划分时,通过分析齿轮灰度图像中的像素点在不同尺度层级下周围邻域的灰度分布的一致性,确定每个像素点的八邻域方向上的各个像素点的延展程度,其有助于提高延展程度计算的数值准确性,为后续筛选延展像素点提供数据支持;为了判断延展的有效性,结合齿轮像素点及其对应的各个映射像素点的八邻域方向上的各个像素点的延展程度,分析延展稳定性,确定各个延展像素点,其有助于避免不稳定区域划分到一个区域内影响后续的齿轮损伤检测准确性;将完成延展的区域作为连通节点,有助于表现出损伤区域的结构性分布特征,进一步提高后续构建的连通图中灰度信息分布规律程度,避免后续的齿轮损伤检测存在误差;确定各个连通节点之间的聚类距离更符合整体图像的结构性分布,使其簇类划分更清晰,方便后续的损伤检测。
- 还没有人留言评论。精彩留言会获得点赞!