一种智能图像测距方法、系统、设备及存储介质与流程
本发明属于图像测量,具体涉及一种智能图像测距方法、系统、设备及存储介质。
背景技术:
1、目前,市面上用于测量两点距离的工具主要有卷尺、红外线测距仪、全站仪等,这些工具都需要单独准备,且在使用过程中具有携带不便、较远距离(高空物体)不易测量、使用成本高、测量效率低等缺点,而现有的手机拍摄测距软件也只能进行近距离物体的测量,同样不适用与远距离的拍摄测量。因此,现有的这些测距工具均不能有效满足日常简单的测距需求。
技术实现思路
1、本发明的目的是提供一种智能图像测距方法、系统、设备及存储介质,用以解决现有技术中存在的上述问题。
2、为了实现上述目的,本发明采用以下技术方案:
3、第一方面,提供一种智能图像测距方法,包括:
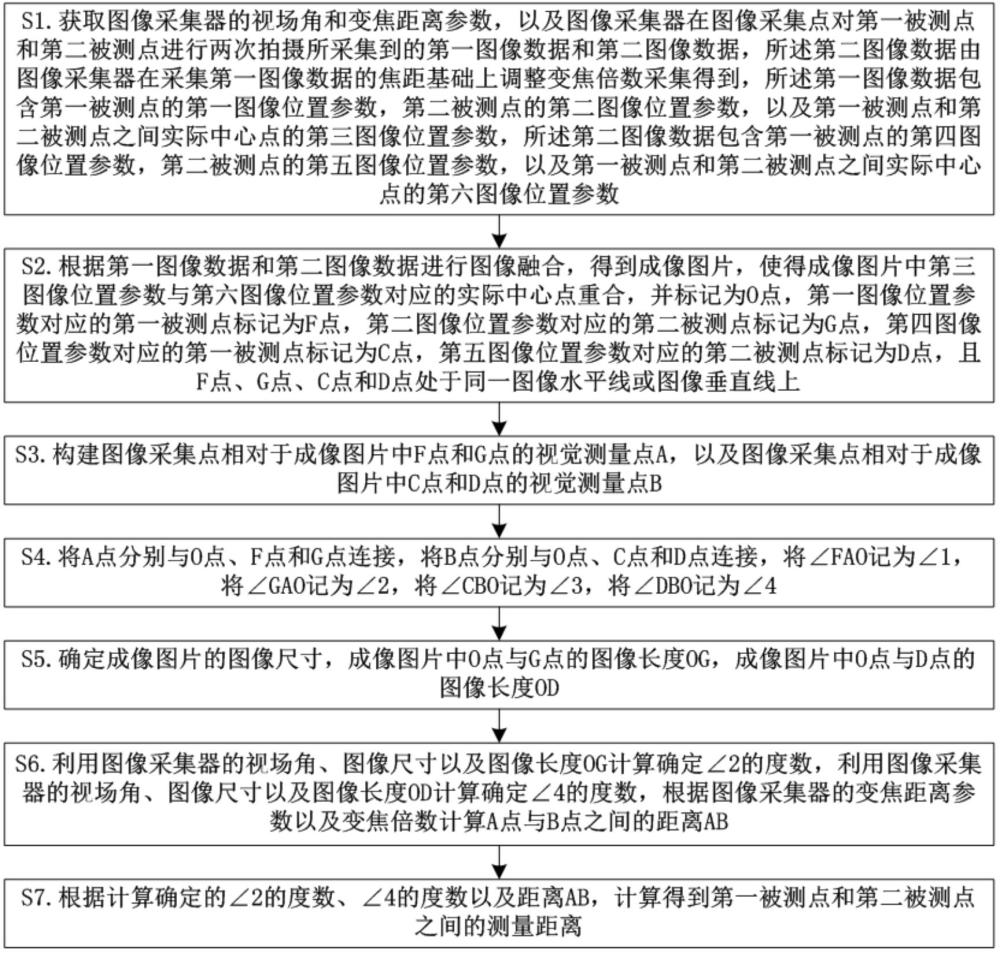
4、获取图像采集器的视场角和变焦距离参数,以及图像采集器在图像采集点对第一被测点和第二被测点进行两次拍摄所采集到的第一图像数据和第二图像数据,所述第二图像数据由图像采集器在采集第一图像数据的焦距基础上调整变焦倍数采集得到,所述第一图像数据包含第一被测点的第一图像位置参数,第二被测点的第二图像位置参数,以及第一被测点和第二被测点之间实际中心点的第三图像位置参数,所述第二图像数据包含第一被测点的第四图像位置参数,第二被测点的第五图像位置参数,以及第一被测点和第二被测点之间实际中心点的第六图像位置参数;
5、根据第一图像数据和第二图像数据进行图像融合,得到成像图片,使得成像图片中第三图像位置参数与第六图像位置参数对应的实际中心点重合,并标记为o点,第一图像位置参数对应的第一被测点标记为f点,第二图像位置参数对应的第二被测点标记为g点,第四图像位置参数对应的第一被测点标记为c点,第五图像位置参数对应的第二被测点标记为d点,且f点、g点、c点和d点处于同一图像水平线或图像垂直线上;
6、构建图像采集点相对于成像图片中f点和g点的视觉测量点a,以及图像采集点相对于成像图片中c点和d点的视觉测量点b;
7、将a点分别与o点、f点和g点连接,将b点分别与o点、c点和d点连接,将∠fao记为∠1,将∠gao记为∠2,将∠cbo记为∠3,将∠dbo记为∠4;
8、确定成像图片的图像尺寸,成像图片中o点与g点的图像长度og,成像图片中o点与d点的图像长度od;
9、利用图像采集器的视场角、图像尺寸以及图像长度og计算确定∠2的度数,利用图像采集器的视场角、图像尺寸以及图像长度od计算确定∠4的度数,根据图像采集器的变焦距离参数以及变焦倍数计算a点与b点之间的距离ab;
10、根据计算确定的∠2的度数、∠4的度数以及距离ab,计算得到第一被测点和第二被测点之间的测量距离。
11、在一个可能的设计中,所述方法还包括:
12、确定成像图片中o点与f点的图像长度of,成像图片中o点与c点的图像长度oc;
13、利用图像采集器的视场角、图像尺寸以及图像长度of计算确定∠1的度数,利用图像采集器的视场角、图像尺寸以及图像长度oc计算确定∠3的度数;
14、根据计算确定的∠1的度数、∠3的度数以及距离ab,计算得到第一被测点和第二被测点之间的测量距离。
15、在一个可能的设计中,所述成像图片的图像尺寸包括图像宽度w,在f点、g点、c点和d点处于同一图像水平线上时,所述利用图像采集器的视场角、图像尺寸以及图像长度og计算确定∠2的度数,利用图像采集器的视场角、图像尺寸以及图像长度od计算确定∠4的度数,包括:
16、将视场角、图像宽度w以及图像长度og代入预置的第一角度计算公式中进行计算,得到∠2的度数,所述第一角度计算公式为
17、
18、其中,θ为视场角;
19、将视场角、图像宽度w以及图像长度od代入预置的第二角度计算公式中进行计算,得到∠4的度数,所述第二角度计算公式为
20、
21、其中,θ为视场角。
22、在一个可能的设计中,所述成像图片的图像尺寸包括图像高度h,在f点、g点、c点和d点处于同一图像垂直线上时,所述利用图像采集器的视场角、图像尺寸以及图像长度og计算确定∠2的度数,利用图像采集器的视场角、图像尺寸以及图像长度od计算确定∠4的度数,包括:
23、将视场角、图像高度h以及图像长度og代入预置的第三角度计算公式中进行计算,得到∠2的度数,所述第三角度计算公式为
24、
25、其中,θ为视场角;
26、将视场角、图像宽度h以及图像长度od代入预置的第四角度计算公式中进行计算,得到∠4的度数,所述第四角度计算公式为
27、
28、其中,θ为视场角。
29、在一个可能的设计中,所述根据图像采集器的变焦距离参数以及变焦倍数计算a点与b点之间的距离ab,包括:用图像采集器的变焦距离参数乘以变焦倍数,得到a点与b点之间的距离ab。
30、在一个可能的设计中,所述根据计算确定的∠2的度数、∠4的度数以及距离ab,计算得到第一被测点和第二被测点之间的测量距离,包括:
31、将∠2的度数、∠4的度数以及距离ab代入预置的距离测量公式中进行计算,得到第一被测点和第二被测点之间的测量距离,所述距离测量公式为
32、
33、其中,l为第一被测点和第二被测点之间的测量距离。
34、在一个可能的设计中,所述第二图像数据由图像采集器在采集第一图像数据的焦距基础上缩小偶数倍焦距后采集得到。
35、第二方面,提供一种智能图像测距系统,包括获取单元、生成单元、构建单元、连接单元、确定单元、计算单元和测定单元,其中:
36、获取单元,用于获取图像采集器的视场角和变焦距离参数,以及图像采集器在图像采集点对第一被测点和第二被测点进行两次拍摄所采集到的第一图像数据和第二图像数据,所述第二图像数据由图像采集器在采集第一图像数据的焦距基础上调整变焦倍数采集得到,所述第一图像数据包含第一被测点的第一图像位置参数,第二被测点的第二图像位置参数,以及第一被测点和第二被测点之间实际中心点的第三图像位置参数,所述第二图像数据包含第一被测点的第四图像位置参数,第二被测点的第五图像位置参数,以及第一被测点和第二被测点之间实际中心点的第六图像位置参数;
37、生成单元,用于根据第一图像数据和第二图像数据进行图像融合,得到成像图片,使得成像图片中第三图像位置参数与第六图像位置参数对应的实际中心点重合,并标记为o点,第一图像位置参数对应的第一被测点标记为f点,第二图像位置参数对应的第二被测点标记为g点,第四图像位置参数对应的第一被测点标记为c点,第五图像位置参数对应的第二被测点标记为d点,且f点、g点、c点和d点处于同一图像水平线或图像垂直线上;
38、构建单元,用于构建图像采集点相对于成像图片中f点和g点的视觉测量点a,以及图像采集点相对于成像图片中c点和d点的视觉测量点b;
39、连接单元,用于将a点分别与o点、f点和g点连接,将b点分别与o点、c点和d点连接,将∠fao记为∠1,将∠gao记为∠2,将∠cbo记为∠3,将∠dbo记为∠4;
40、确定单元,用于确定成像图片的图像尺寸,成像图片中o点与g点的图像长度og,成像图片中o点与d点的图像长度od;
41、计算单元,用于利用图像采集器的视场角、图像尺寸以及图像长度og计算确定∠2的度数,利用图像采集器的视场角、图像尺寸以及图像长度od计算确定∠4的度数,根据图像采集器的变焦距离参数以及变焦倍数计算a点与b点之间的距离ab;
42、测定单元,用于根据计算确定的∠2的度数、∠4的度数以及距离ab,计算得到第一被测点和第二被测点之间的测量距离。
43、第三方面,提供一种智能图像测距设备,包括:
44、存储器,用于存储指令;
45、处理器,用于读取所述存储器中存储的指令,并根据指令执行上述第一方面中任意一种所述的方法。
46、第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,使得所述计算机执行第一方面中任意一种所述的方法。同时,还提供一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行第一方面中任意一种所述的方法。
47、有益效果:本发明利用图像采集器两次拍摄所采集的第一图像数据和第二图像数据进行成像,使成像图片包含两次拍摄的实际中心点以及第一被测点和第二被测点在两次拍摄中成像位置,再基于成像图片构建两次拍摄的虚拟视觉测量点,利用图像采集器的视场角、成像图片的图像尺寸以及成像图片上相应点位之间的图像长度计算出视觉测量点与成像图片上相应点位的虚拟角度,根据图像采集器的变焦距离参数以及变焦倍数计算虚拟视觉测量点之间的距离,最后根据相应虚拟角度和距离计算得到第一被测点和第二被测点之间的测量距离,可以实现高效、准确的图像测距。本发明利用相应的图像采集器即可实现简单、智能的图像拍摄测距,解决现有测距工具使用不便、测量效率低的问题,有效满足人们的日常测量需求。
- 还没有人留言评论。精彩留言会获得点赞!