一种基于深度学习的无人机图像处理方法与流程
本申请涉及数据识别,特别涉及一种基于深度学习的无人机图像处理方法。
背景技术:
1、无人机也叫无人飞行器,是控制人员在地面上控制的飞行设备,其能够完成以往在地面上无法完成的工作,例如农业监测、国土测绘等。但是,无人机在空中飞行时其视觉覆盖面积较大,而有些区域因涉及机密或安全而禁止无人机抵近,因此要求无人机在飞行前进行登记,并在允许的安全区域中飞行。
2、然而,仍然有一些操作人员在没有登记的情况下就直接操作无人机飞行,这种行为称为“黑飞”,黑飞时的途经区域不受管理部门控制,因此存在很多危险因素。对于这种黑飞行为,通常会设置多个视觉设备,以实时监控空中是否有无人机存在。例如,cn109753903a公开了一种基于深度学习的无人机检测方法,利用深度学习技术对实时获取的图像进行分析处理,以识别空中是否存在无人机以及无人机的型号等信息。
3、上述专利在识别无人机的型号之前,需要首先确定无人机在图像中的位置,这时就需要对整个图像进行分析。在采用多个视觉设备进行接力式监控时,如果每个视觉设备采集的图像都进行整体分析,那么数据量将极大增加,大大提高了监控消耗的计算机资源。
技术实现思路
1、本申请实施例提供了一种基于深度学习的无人机图像处理方法,用以解决现有技术中所有视觉设备采集的图像都进行整体分析时数据量较大的问题。
2、一方面,本申请实施例提供了一种基于深度学习的无人机图像处理方法,包括:
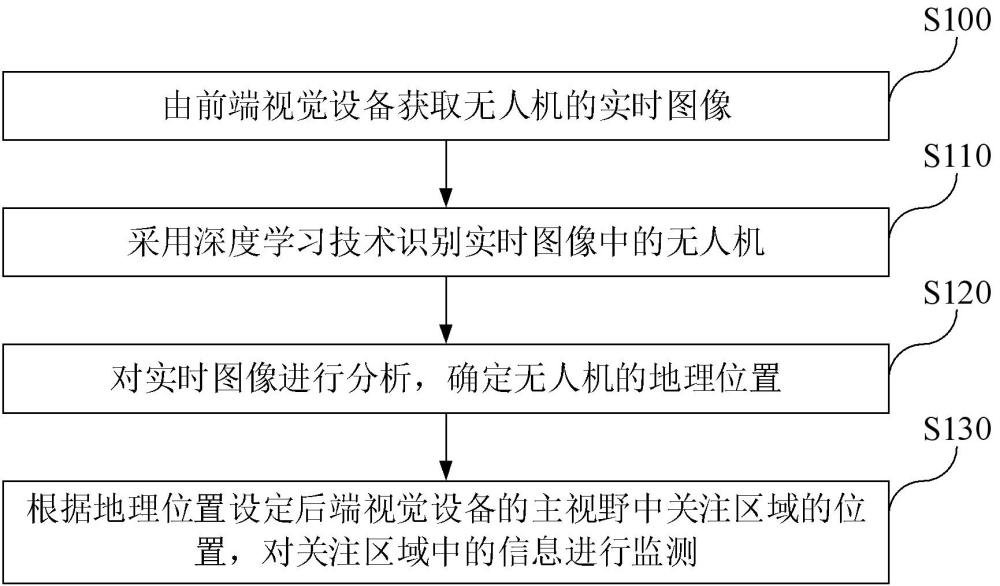
3、由前端视觉设备获取无人机的实时图像;
4、采用深度学习技术识别实时图像中的无人机;
5、对实时图像进行分析,确定无人机的地理位置;
6、根据地理位置设定后端视觉设备的主视野中关注区域的位置,对关注区域中的信息进行监测,其中前端视觉设备的视野和后端视觉设备的视野相交。
7、在一种可能的实现方式中,利用识别模型识别无人机,识别模型基于ssd算法建立。
8、在一种可能的实现方式中,在识别无人机后获得无人机的型号,根据型号获取对应的距离-大小对应关系,根据无人机在实时图像中的大小以及距离-大小对应关系确定前端视觉设备和无人机之间的目标距离。
9、在一种可能的实现方式中,在识别无人机前,利用前端视觉设备采集已知距离上无人机的标准图像,确定无人机在标准图像中的面积大小,建立距离-大小对应关系。
10、在一种可能的实现方式中,在采集标准图像时,对于每一个型号的无人机,采集多个不同距离的标准图像,确定标准图像中无人机的面积大小,形成多组距离-大小数据对,对距离-大小数据对进行曲线拟合,得到的曲线的函数表达式作为距离-大小对应关系。
11、在一种可能的实现方式中,在确定无人机的地理位置时,首先确定实时图像中无人机和实时图像的中心的像素距离,根据像素距离和目标距离确定无人机和前端视觉设备的相对角度,然后根据相对角度和目标距离确定无人机和前端视觉设备在水平面上的投影距离,最后基于前端视觉设备的真实位置和投影距离确定无人机在三维坐标系中的坐标,作为地理位置。
12、在一种可能的实现方式中,在确定相对角度时,以目标距离和像素距离分别为斜边和直角边建立直角三角形,确定与以像素距离为直角边相对的角的角度,结合前端视觉设备中轴线和水平面之间的角度,得到相对角度。
13、在一种可能的实现方式中,在确定地理位置后,根据后端视觉设备的主视野中像素-位置对应关系确定关注区域的中心位置。
14、在一种可能的实现方式中,在确定中心位置后,将中心位置外部设定大小的范围作为关注区域。
15、本申请中的一种基于深度学习的无人机图像处理方法,具有以下优点:
16、采用接力式的前端视觉设备和后端视觉设备,在前端视觉设备采集并识别无人机后,得到无人机的地理位置,后端视觉设备仅需要关注主视野中与无人机所处地理位置对应的区域即可,不需要对整个主视野中的信息进行处理,大大减小了数据量。
技术特征:
1.一种基于深度学习的无人机图像处理方法,其特征在于,包括:
2.根据权利要求1所述的一种基于深度学习的无人机图像处理方法,其特征在于,利用识别模型识别无人机(200),所述识别模型基于ssd算法建立。
3.根据权利要求1所述的一种基于深度学习的无人机图像处理方法,其特征在于,在识别无人机(200)前,利用前端视觉设备采集已知距离上无人机(200)的标准图像,确定无人机(200)在所述标准图像中的面积大小,建立所述距离-大小对应关系。
4.根据权利要求3所述的一种基于深度学习的无人机图像处理方法,其特征在于,在采集所述标准图像时,对于每一个型号的无人机(200),采集多个不同距离的所述标准图像,确定所述标准图像中无人机(200)的面积大小,形成多组距离-大小数据对,对所述距离-大小数据对进行曲线拟合,得到的曲线的函数表达式作为所述距离-大小对应关系。
5.根据权利要求1所述的一种基于深度学习的无人机图像处理方法,其特征在于,在确定所述相对角度时,以所述目标距离和像素距离分别为斜边和直角边建立直角三角形,确定与以所述像素距离为直角边相对的角的角度,结合前端视觉设备中轴线和水平面之间的角度,得到所述相对角度。
技术总结
本申请公开了一种基于深度学习的无人机图像处理方法,涉及数据识别技术领域。包括:由前端视觉设备获取无人机的实时图像;采用深度学习技术识别实时图像中的无人机;对实时图像进行分析,确定无人机的地理位置;根据地理位置设定后端视觉设备的主视野中关注区域的位置,对关注区域中的信息进行监测,其中前端视觉设备的视野和后端视觉设备的视野相交。本申请采用接力式的前端视觉设备和后端视觉设备,在前端视觉设备采集并识别无人机后,得到无人机的地理位置,后端视觉设备仅需要关注主视野中与无人机所处地理位置对应的区域即可,不需要对整个主视野中的信息进行处理,大大减小了数据量。
技术研发人员:赵永峰,马晓青,张虎,魏嵬,王辉
受保护的技术使用者:西安猎隼航空科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!