多尺度二级光学遥感图像条纹噪声智能检测方法及装置与流程
本发明涉及图像处理,尤其涉及多尺度二级光学遥感图像条纹噪声智能检测方法及装置。
背景技术:
1、随着航天遥感技术的日益发展,获取的遥感光学图像数据质量越来越高。然而,由于遥感卫星的特殊性质,遥感图像在传感器拍摄时会受到云雾遮挡、大气干扰、光照变化等,使得遥感图像中往往会出现各种各样的干扰,例如遥感图像中往往存在噪声、条纹等。这些干扰不仅影响了遥感图像的目视效果,也对遥感图像的定量分析产生巨大的影响。
2、光学遥感图像的条纹噪声作为一种经常出现的干扰,它们通常是由于传感器扫描线和传感器通道响应不均匀等因素引起的。光学遥感图像中的条纹噪声会导致图像亮度、颜色和纹理的不连续性,从而影响遥感图像的质量和可用性。因此,条纹噪声检测在光学遥感图像处理中具有重要意义,可以帮助提高遥感图像的质量,增强遥感图像的应用价值。
3、传统的光学遥感图像条纹检测方法主要针对一级图像产品条纹进行检测分析。主要包括基于小波变换和滤波器组等方法,但这些传统方法存在一些局限性,如对噪声敏感、条纹定位不准确等问题。与此同时,近年来随着深度学习技术的不断发展,基于深度学习数据驱动的条纹检测方法逐渐得到了一定的研究。现有基于深度学习的光学遥感图像检测方法主要是使用卷积神经网络对条纹噪声的特征进行自动化的特征提取,然后通过激活函数来学习光学遥感图像的非线性表示,从而实现条纹检测。上述基于深度学习的条纹噪声检测方法仍然是基于一级图像产品,更多是基于条纹在图像上的垂直分布特性。现有研究中,采用的神经网络以卷积神经网络为基础,检测时以水平密集扫描和垂直稀疏扫描的方式来实现快速精确的检测。该方法提出的水平密集扫描和垂直稀疏扫描可以有效处理一级遥感图像条纹检测问题,但不适用于二级遥感影像的条纹检测。因此,目前二级图像产品暂无较好的条纹噪声检测手段。
技术实现思路
1、本发明所要解决的技术问题在于,提供多尺度二级光学遥感图像条纹噪声智能检测方法及装置,对遥感图像二级产品进行栅格化分块,该策略极大降低了计算复杂度,减少宽幅图像产品的内存开销;然后,在典型图像上利用神经网络方法,进行智能条纹检测,提升图像条纹检测率;最后,通过统计条纹检测结果,为图像评估提供评价标准。本发明实现高时效性高精度光学图像条纹噪声智能检测,解决海量光学二级遥感产品条纹检测难,速度慢,精度低的问题。
2、为了解决上述技术问题,本发明实施例第一方面公开了多尺度二级光学遥感图像条纹噪声智能检测方法,所述方法包括:
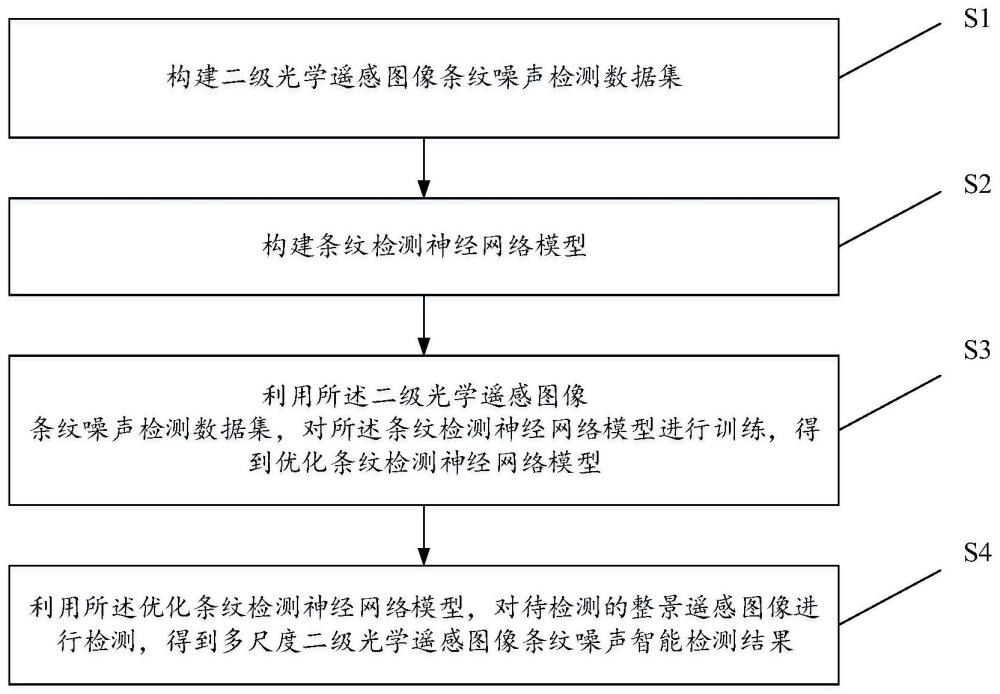
3、s1,构建二级光学遥感图像条纹噪声检测数据集;
4、s2,构建条纹检测神经网络模型;
5、s3,利用所述二级光学遥感图像条纹噪声检测数据集,对所述条纹检测神经网络模型进行训练,得到优化条纹检测神经网络模型;
6、s4,利用所述优化条纹检测神经网络模型,对待检测的整景遥感图像进行检测,得到多尺度二级光学遥感图像条纹噪声智能检测结果。
7、作为一种可选的实施方式,本发明实施例第一方面中,所述构建二级光学遥感图像条纹噪声检测数据集的方法包括:
8、s11,获取二级光学遥感图像;
9、s12,对所述二级光学遥感图像进行数据增强处理,得到第一数据块集合;
10、s13,对所述第一数据块集合进行多线程栅格化分块处理,得到第二数据块集合;
11、所述第二数据块集合包括l个大小为512像素×512像素的数据块,l为正整数;
12、s14,对所述第二数据块集合进行数据清理,得到第三数据块集合;
13、s15,对所述第三数据块集合中的数据块进行标注,得到所述第三数据块集合的标签信息;
14、s16,所述第三数据块集合和所述第三数据块集合的标签信息构成二级光学遥感图像条纹噪声检测数据集。
15、作为一种可选的实施方式,本发明实施例第一方面中,所述对所述二级光学遥感图像进行数据增强处理,得到第一数据块集合,包括:
16、s121,对所述二级光学遥感图像进行旋转和翻转处理,得到预处理二级光学遥感图像;
17、s122,利用遥感图像数据增强模型对所述预处理二级光学遥感图像进行增强,得到第一数据块集合。
18、作为一种可选的实施方式,本发明实施例第一方面中,所述遥感图像数据增强模型包括生成器和判别器;
19、所述生成器的输入为随机变量;
20、所述生成器包括卷积模块conv1、卷积模块conv2、卷积模块conv3、卷积模块conv4和卷积模块conv5;
21、所述卷积模块conv1的输出输入所述卷积模块conv2,所述卷积模块conv2的输出输入所述卷积模块conv3,所述卷积模块conv3的输出输入所述卷积模块conv4;所述卷积模块conv4的输出输入所述卷积模块conv5;
22、卷积模块conv1用于接收输入的随机变量;
23、所述卷积模块conv5用于输出生成数据;
24、所述判别器采用多尺度cbl模块对生成数据进行识别;
25、所述cbl模块包括卷积层conv、bn批正则化层和leaky relu激活函数层;
26、所述cbl模块用于对所述生成数据和真实数据进行卷积运算,得到图像特征信息;
27、所述判别器利用全连接层和softmax激活函数对所述生成数据进行判别。
28、作为一种可选的实施方式,本发明实施例第一方面中,所述条纹检测神经网络模型包括第一特征提取模块、第二特征提取模块、第三特征提取模块、第四特征提取模块和第五特征提取模块;
29、所述第一特征提取模块包括第一子特征提取模块、第二子特征提取模块和第三子特征提取模块;
30、所述第二特征提取模块包括第四子特征提取模块、第五子特征提取模块和第六子特征提取模块;
31、所述第三特征提取模块包括第七子特征提取模块和第八子特征提取模块;
32、所述第一子特征提取模块用于接收输入数据;
33、所述第一子特征提取模块的输出分别输入所述第二子特征提取模块、所述第四子特征提取模块和所述第五子特征提取模块;
34、所述第二子特征提取模块的输出分别输入所述第三子特征提取模块和所述第四特征提取模块;
35、所述第三子特征提取模块的输出分别输入所述第四子特征提取模块和所述第七子特征提取模块;
36、所述第四子特征提取模块的输出输入所述第五子特征提取模块;
37、所述第五子特征提取模块的输出分别输入所述第六子特征提取模块和所述第七子特征提取模块;
38、所述第六子特征提取模块的输出输入所述第五特征提取模块;
39、所述第七子特征提取模块的输出分别输入所述第八子特征提取模块和所述第四特征提取模块;
40、所述第八子特征提取模块的输出、所述第四特征提取模块的输出输入所述第五特征提取模块。
41、作为一种可选的实施方式,本发明实施例第一方面中,所述利用所述优化条纹检测神经网络模型,对待检测的整景遥感图像进行检测,得到多尺度二级光学遥感图像条纹噪声智能检测结果,包括:
42、s41,对待检测的整景遥感图像进行预处理,得到预处理整景遥感图像数据信息;
43、s42,利用所述优化条纹检测神经网络模型,对所述预处理整景遥感图像数据信息进行处理,得到多尺度二级光学遥感图像条纹噪声智能检测结果。
44、作为一种可选的实施方式,本发明实施例第一方面中,所述对待检测的整景遥感图像进行预处理,得到预处理整景遥感图像数据信息,包括:
45、对待检测的整景遥感图像进行栅格化分块处理,得到大小为512像素×512像素的n个数据块,n为正整数。
46、本发明实施例第二方面公开了多尺度二级光学遥感图像条纹噪声智能检测装置,所述装置包括:
47、数据集构建单元,用于构建二级光学遥感图像条纹噪声检测数据集;
48、神经网络模型构建单元,用于构建条纹检测神经网络模型;
49、模型训练单元,用于利用所述二级光学遥感图像条纹噪声检测数据集,对所述条纹检测神经网络模型进行训练,得到优化条纹检测神经网络模型;
50、条纹噪声检测单元,用于利用所述优化条纹检测神经网络模型,对待检测的整景遥感图像进行检测,得到多尺度二级光学遥感图像条纹噪声智能检测结果。
51、作为一种可选的实施方式,本发明实施例第二方面中,所述构建二级光学遥感图像条纹噪声检测数据集的方法包括:
52、s11,获取二级光学遥感图像;
53、s12,对所述二级光学遥感图像进行数据增强处理,得到第一数据块集合;
54、s13,对所述第一数据块集合进行多线程栅格化分块处理,得到第二数据块集合;
55、所述第二数据块集合包括l个大小为512像素×512像素的数据块,l为正整数;
56、s14,对所述第二数据块集合进行数据清理,得到第三数据块集合;
57、s15,对所述第三数据块集合中的数据块进行标注,得到所述第三数据块集合的标签信息;
58、s16,所述第三数据块集合和所述第三数据块集合的标签信息构成二级光学遥感图像条纹噪声检测数据集。
59、作为一种可选的实施方式,本发明实施例第二方面中,所述对所述二级光学遥感图像进行数据增强处理,得到第一数据块集合,包括:
60、s121,对所述二级光学遥感图像进行旋转和翻转处理,得到预处理二级光学遥感图像;
61、s122,利用遥感图像数据增强模型对所述预处理二级光学遥感图像进行增强,得到第一数据块集合。
62、作为一种可选的实施方式,本发明实施例第二方面中,所述遥感图像数据增强模型包括生成器和判别器;
63、所述生成器的输入为随机变量;
64、所述生成器包括卷积模块conv1、卷积模块conv2、卷积模块conv3、卷积模块conv4和卷积模块conv5;
65、所述卷积模块conv1的输出输入所述卷积模块conv2,所述卷积模块conv2的输出输入所述卷积模块conv3,所述卷积模块conv3的输出输入所述卷积模块conv4;所述卷积模块conv4的输出输入所述卷积模块conv5;
66、卷积模块conv1用于接收输入的随机变量;
67、所述卷积模块conv5用于输出生成数据;
68、所述判别器采用多尺度cbl模块对生成数据进行识别;
69、所述cbl模块包括卷积层conv、bn批正则化层和leaky relu激活函数层;
70、所述cbl模块用于对所述生成数据和真实数据进行卷积运算,得到图像特征信息;
71、所述判别器利用全连接层和softmax激活函数对所述生成数据进行判别。
72、作为一种可选的实施方式,本发明实施例第二方面中,所述条纹检测神经网络模型包括第一特征提取模块、第二特征提取模块、第三特征提取模块、第四特征提取模块和第五特征提取模块;
73、所述第一特征提取模块包括第一子特征提取模块、第二子特征提取模块和第三子特征提取模块;
74、所述第二特征提取模块包括第四子特征提取模块、第五子特征提取模块和第六子特征提取模块;
75、所述第三特征提取模块包括第七子特征提取模块和第八子特征提取模块;
76、所述第一子特征提取模块用于接收输入数据;
77、所述第一子特征提取模块的输出分别输入所述第二子特征提取模块、所述第四子特征提取模块和所述第五子特征提取模块;
78、所述第二子特征提取模块的输出分别输入所述第三子特征提取模块和所述第四特征提取模块;
79、所述第三子特征提取模块的输出分别输入所述第四子特征提取模块和所述第七子特征提取模块;
80、所述第四子特征提取模块的输出输入所述第五子特征提取模块;
81、所述第五子特征提取模块的输出分别输入所述第六子特征提取模块和所述第七子特征提取模块;
82、所述第六子特征提取模块的输出输入所述第五特征提取模块;
83、所述第七子特征提取模块的输出分别输入所述第八子特征提取模块和所述第四特征提取模块;
84、所述第八子特征提取模块的输出、所述第四特征提取模块的输出输入所述第五特征提取模块。
85、作为一种可选的实施方式,本发明实施例第二方面中,所述利用所述优化条纹检测神经网络模型,对待检测的整景遥感图像进行检测,得到多尺度二级光学遥感图像条纹噪声智能检测结果,包括:
86、s41,对待检测的整景遥感图像进行预处理,得到预处理整景遥感图像数据信息;
87、s42,利用所述优化条纹检测神经网络模型,对所述预处理整景遥感图像数据信息进行处理,得到多尺度二级光学遥感图像条纹噪声智能检测结果。
88、作为一种可选的实施方式,本发明实施例第二方面中,所述对待检测的整景遥感图像进行预处理,得到预处理整景遥感图像数据信息,包括:
89、对待检测的整景遥感图像进行栅格化分块处理,得到大小为512像素×512像素的n个数据块,n为正整数。
90、本发明第三方面公开了另一种多尺度二级光学遥感图像条纹噪声智能检测装置,所述装置包括:
91、存储有可执行程序代码的存储器;
92、与所述存储器耦合的处理器;
93、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明实施例第一方面公开的多尺度二级光学遥感图像条纹噪声智能检测方法中的部分或全部步骤。
94、本发明第四方面公开了一种计算机可存储介质,所述计算机可存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明实施例第一方面公开的多尺度二级光学遥感图像条纹噪声智能检测方法中的部分或全部步骤。
95、与现有技术相比,本发明实施例具有以下有益效果:
96、(1)采用多尺度智能特征提取技术,极大地提升了条纹检测算法的准确性;
97、(2)在栅格化分块处理后,采用网格化并行多线程处理,进一步提升了条纹检测算法的时效性;
98、(3)通过构建海量典型地物条纹检测数据集,训练条纹检测神经网络,提升了条纹检测算法的精度与可靠性;
99、(4)通过神经网络模型近实时设计,实现神经网络模型的快速推理,提升了条纹检测算法的时效性;
100、(5)通过实现智能条纹检测,得到条纹检测统计结果,对遥感图像进行快速质量评价。
- 还没有人留言评论。精彩留言会获得点赞!