仿生手的控制方法、控制装置、仿生手和存储介质与流程
本发明涉及仿生手,特别涉及一种仿生手的控制方法、控制装置、仿生手和存储介质。
背景技术:
1、智能仿生手是一款脑机接口技术于人工智能算法高度融合的智能产品。智能仿生手可以通过提取穿戴者手臂的肌电信号,识别穿戴者的运动意图,并将运动示意图转化成智能仿生手的动作,从而可以让上肢截肢患者基于仿生手来提高生活体验。
2、目前,仿生手在执行动作时,由于仿生手完成上一个手势动作后,在进行下一个手势动作时,上一个手势动作容易对下一个手势动作造成干扰,从而容易影响仿生手使用者的使用体验。
技术实现思路
1、本发明提供了一种仿生手的控制方法、控制装置、仿生手和存储介质,旨在提高仿生手穿戴者的使用体验。
2、为了实现上述的目的,本发明采用了如下的技术方案:
3、本发明提出一种仿生手的控制方法,所述仿生手的控制方法包括:
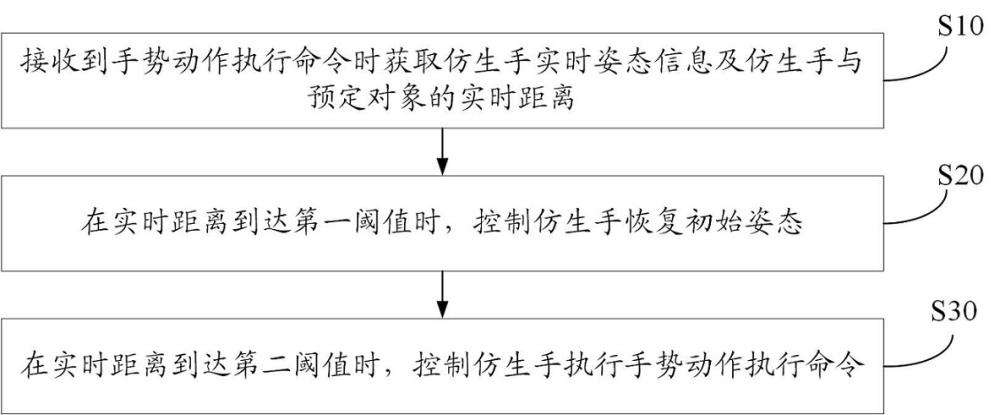
4、接收到手势动作执行命令时获取仿生手实时姿态信息及仿生手与预定对象的实时距离;
5、在所述实时距离到达第一阈值时,控制所述仿生手恢复初始姿态;
6、在所述实时距离到达第二阈值时,控制所述仿生手执行所述手势动作执行命令。
7、在一些实施例中,仿生手的控制方法还包括以下步骤:
8、获取所述预定对象的轮廓特征;
9、根据所述实时姿态信息和轮廓特征计算所述仿生手执行恢复初始状态所需的安全距离。
10、在一些实施例中,所述获取仿生手实时姿态信息及仿生手与预定对象的实时距离包括:
11、获取所述仿生手前方实时视频,并结合红外距离传感器检测所述仿生手和所述预定对象的实时距离。
12、在一些实施例中,所述获取仿生手与预定对象的实时距离还包括:
13、获取所述仿生手的运动数据,并结合超声波距离传感器检测所述仿生手和所述预定对象的实时距离。
14、在一些实施例中,所述控制仿生手执行当前待执行的手势动作包括:
15、通过肌电传感器检测肌电信号,并根据所述肌电信号进行动作匹配识别,以获取识别结果;
16、根据所述识别结果控制所述仿生手执行当前待执行的手势动作。
17、在一些实施例中,所述控制所述仿生手执行当前待执行的手势动作还包括:
18、通过所述预定对象与预设力度模板进行匹配,以获取匹配结果;
19、根据所述匹配结果控制所述仿生手执行当前待执行的手势动作。
20、在一些实施例中,所述控制仿生手执行当前待执行的手势动作之后还包括:
21、检测所述仿生手的执行情况,并通过提示装置作出反馈,以获取所述仿生手的动作完成情况。
22、本发明进一步提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例所述仿生手的控制方法的步骤。
23、本发明进一步提出一种控制装置,包括存储器和处理器,存储器用于存储计算机程序;处理器用于执行所述计算机程序时实现上述实施例所述仿生手的控制方法的步骤。
24、本发明进一步提出一种仿生手,包括控制装置和肌电传感器,所述控制装置为上述控制装置,所述肌电传感器用于检测肌电信号并输出至所述控制装置。
25、本发明的仿生手的控制方法技术方案中,通过接收到手势动作执行命令时获取仿生手实时姿态信息及仿生手与预定对象的实时距离,在实时距离到达第一阈值时,控制仿生手恢复初始姿态,在实时距离到达第二阈值时,控制仿生手执行手势动作执行命令,从而可以避免上一手势动作对下一手势动作造成干扰,进而提高仿生手穿戴者的使用体验。
技术特征:
1.一种仿生手的控制方法,其特征在于,所述仿生手的控制方法包括:
2.根据权利要求1所述的仿生手的控制方法,其特征在于,还包括以下步骤:
3.根据权利要求1所述的仿生手的控制方法,其特征在于,所述获取仿生手实时姿态信息及仿生手与预定对象的实时距离包括:
4.根据权利要求1所述的仿生手的控制方法,其特征在于,所述获取仿生手与预定对象的实时距离还包括:
5.根据权利要求1所述的仿生手的控制方法,其特征在于,所述控制仿生手执行当前待执行的手势动作包括:
6.根据权利要求5所述的仿生手的控制方法,其特征在于,所述控制所述仿生手执行当前待执行的手势动作还包括:
7.根据权利要求1所述的仿生手的控制方法,其特征在于,所述控制仿生手执行当前待执行的手势动作之后还包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述仿生手的控制方法的步骤。
9.一种控制装置,其特征在于,包括存储器和处理器,存储器用于存储计算机程序;处理器用于执行所述计算机程序时实现权利要求1至7任一项所述仿生手的控制方法的步骤。
10.一种仿生手,其特征在于,包括控制装置和肌电传感器,所述控制装置为权利要求9所述的控制装置,所述肌电传感器用于检测肌电信号并输出至所述控制装置。
技术总结
本发明公开了一种仿生手的控制方法,包括接收到手势动作执行命令时获取仿生手实时姿态信息及仿生手与预定对象的实时距离;在实时距离到达第一阈值时,控制仿生手恢复初始姿态;在实时距离到达第二阈值时,控制仿生手执行手势动作执行命令。本发明还公开了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现仿生手控制方法的步骤。本发明还公开了一种控制装置,包括存储器和处理器。本发明还公开了一种仿生手,包括控制装置。本发明的技术方案,提高了仿生手穿戴者的使用体验。
技术研发人员:韩璧丞,汪文广,阿迪斯,李俊翰
受保护的技术使用者:浙江强脑科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!