一种基于建筑可视化的信息模型数据集成方法及系统与流程
本发明涉及信息模型数据集成,特别是一种基于建筑可视化的信息模型数据集成方法及系统。
背景技术:
1、目前智慧建筑平台,建筑可视化成为一种主流,特别是虚拟现实(vr)技术的应用,更是让建筑可视化达到了一定的高度,但是建筑可视化平台一般是独立存在的,其展示形式有bim、ue4、three.js / webgl等,其构件信息模型和系统中构件数据往往无法形成关联,可视化平台的构件模型建模和系统构件数据建模大部分情况下没有关联,以标注摄像头为例,通常使用的方法是采用人工在可视化平台上要找到每个摄像头,得到该物件的唯一键值,比如uuid、uid等,并记录该物件的一些关键信息,比如什么小区、什么楼层、哪个房间、什么位置的摄像头,还有该建筑构件的多级节点信息(这些信息可能已经存在可视化平台的构件模型中),也有可能需要人工区分,然后输出成一份excel表格;系统数据处理人员,拿到这份表格后,通过查询的方式,找到对应的数据,输入对应物件在可视化平台上唯一键值,形成绑定。
2、这样就可以在可视化平台调用系统数据的时候,通过唯一键值,迅速找到系统构件数据的位置,但同时存在很多缺点,以上方法因为通过人工标注的方式,极有可能出现标注错误,导致建筑可视化平台的构件模型和系统构件数据绑定错误,维护起来非常麻烦。
技术实现思路
1、鉴于上述可视化平台的构件模型建模和系统构件数据中使用人工标注存在的问题,提出了本发明。
2、因此,本发明所要解决的问题在于如何提供一种可以迅速找到对应的数据,并且精准定位到系统中构件数据在建筑可视化平台的投影的方法。
3、为解决上述技术问题,本发明提供如下技术方案:
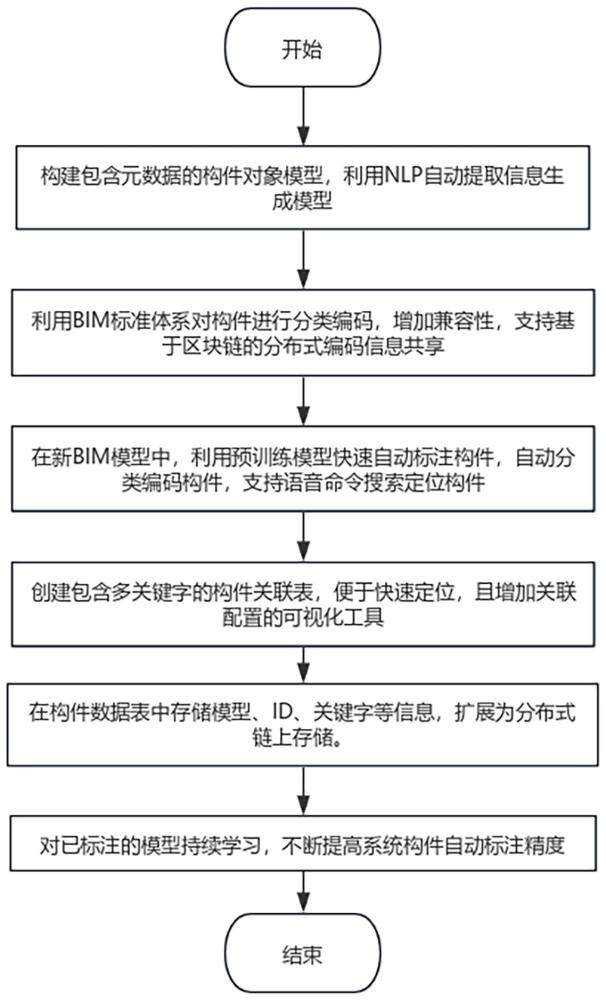
4、第一方面,本发明实施例提供了一种基于建筑可视化的信息模型数据集成方法,其包括,利用nlp自动提取信息生成包含元数据的构件对象模型;利用bim标准体系对构件进行分类编码,支持基于区块链的分布式编码信息共享;在bim模型中,利用预训练模型快速自动标注构件,自动分类编码构件,支持语音命令搜索定位构件;创建包含多关键字的构件关联表,增加关联配置的可视化工具;在构件数据表中存储模型、id和关键字信息,扩展为分布式链上存储;对于bim的自动标注构件的数据模型持续学习,优化系统构件自动标注精度。
5、作为本发明所述基于建筑可视化的信息模型数据集成方法的一种优选方案,其中:构建所述包含元数据的构件对象模型包括以下步骤:采集多个bim模型文件及元数据;使用自然语言处理提取构件属性信息;定义对象类,包括封装属性、关系和方法;支持自定义扩展新类别和功能。
6、作为本发明所述基于建筑可视化的信息模型数据集成方法的一种优选方案,其中:所述利用nlp自动提取信息生成模型的操作步骤如下:清洗文本,去除无效字符;提取词语和实体,并将部分词语标注词性;若词性为名词n,则判断为候选实体,若句子匹配“x属于y”模板,则建立x-y关系;基于机器学习,训练条件随机字段模型,标注实体和关系;
7、对条件随机字段模型进行微调,目标函数为模型损失,加上正则化项,公式如下:
8、;
9、其中,为模型预测输出, y为真实标注,λ1和λ2分别是l2正则化和l1正则化的强度超参数;ω(f) 为特征选择项,为权重;l2正则化和l1正则化是机器学习中常用的两种正则化技术;
10、对权重进行更新,公式如下:
11、;
12、其中,为前一次迭代的权重,μ是动量系数,为损失对权重的梯度;使用以下评估指标:
13、precision = tp / (tp + fp);
14、recall = tp / (tp + fn);
15、f1 = 2 * precision * recall / (precision + recall);
16、其中,tp为真正例,fp为假正例,fn为漏报错误;绘制pr曲线反映权衡。
17、作为本发明所述基于建筑可视化的信息模型数据集成方法的一种优选方案,其中:所述在bim模型中,利用预训练模型快速自动标注构件,自动分类编码构件,支持语音命令搜索定位构件包括以下步骤:输入bim模型三维数据,利用检测模型输出构件候选框;对每个候选框使用分类模型判断构件类别;根据构件类别,匹配预定义的编码规则;将编码信息存储为构件的自定义参数,建立编码与bim模型元素的关联;支持语音命令中的关键词映射到构件编码,返回构件在模型中的视图定位。
18、作为本发明所述基于建筑可视化的信息模型数据集成方法的一种优选方案,其中:所述对每个候选框使用分类模型判断构件类别包括,若候选框内部聚类紧密度tightness>τ1,则判定为有效构件;若构件面积normalizedarea>τ2,则保留用于分类;所述候选框内部聚类紧密度tightness用于判断一个候选框内是否包含一个完整的构件,方法为候选框内像素级集群数量除以总像素数,其中,τ1为预设的紧密度阈值,当候选框内部聚类紧密度tightness大于τ1时认为该候选框包含整体构件;所述构件面积normalizedarea用于反映构件占图像的面积比例大小;方法为将候选框内构件面的像素数除以图像总像素数,得到比值;其中,τ2为预设的最小面积比阈值,对候选框面积的大小进行过滤。
19、作为本发明所述基于建筑可视化的信息模型数据集成方法的一种优选方案,其中:τ1和τ2的设定过程为:采集大量已标注图像,包含构件的边框和类别标签;随机划分数据集为训练集、验证集和测试集;在训练集上训练目标检测模型,获取构件候选框;对每个候选框,计算候选框内部聚类紧密度tightness 和构件面积normalizedarea;在验证集上,使用不同的(τ1, τ2)值组合,保留满足两个阈值的候选框;计算保存下来的框与真值框的匹配情况,目标为最大化匹配准确率precision和召回率recall;记录在验证集上达到最佳匹配效果对应的(τ1, τ2);在独立的测试集上评估优化后的检测性能,得到依赖客观数据优化的τ1和τ2的最终值。
20、作为本发明所述基于建筑可视化的信息模型数据集成方法的一种优选方案,其中:所述在验证集上达到最佳匹配效果的判定过程为:利用视觉注意力模型判断每个候选框是否符合精确匹配和类别匹配;若两者都匹配,则标记为真正例tp,仅预测匹配真值,则计为假正fp,仅真值框未被匹配,则计为漏报fn;计算精确率与召回率,加入类别惩罚因p,若类别不匹配,则令penalty=0.5;否则令penalty=1;进一步修正精确率与召回率:
21、precision_corrected = precision * penalty;
22、recall_corrected = recall * penalty;
23、计算综合f1指标并在所有(τ1,τ2)组合上寻找最大值。
24、第二方面,本发明为进一步解决可视化平台的构件模型建模和系统构件数据中使用人工标注存在的问题,实施例提供了基于建筑可视化的信息模型数据集成系统,其包括:构件对象模型,用于支持自定义属性、关系和行为,利用nlp自动提取信息生成模型;构件建模模块:用于负责构建构件对象模型,支持添加自定义属性、设置关系和编写业务逻辑;编码模块,用于负责根据bim标准给构件分类和编码;自动标注模块,用于使用机器学习算法自动标注bim模型中的构件;关联配置模块,用于管理构件多关键字关联表,提供关联关系配置工具;链上存储模块,用于将构件数据上链,实现去中心化分布式存储。
25、第三方面,本发明实施例提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中:所述计算机程序被处理器执行时实现如本发明第一方面所述的基于建筑可视化的信息模型数据集成方法的任一步骤。
26、第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,其中:所述计算机程序被处理器执行时实现如本发明第一方面所述的基于建筑可视化的信息模型数据集成方法的任一步骤。
27、本发明有益效果为,本发明支持自定义扩展,提高灵活性,满足不同项目和组织的需求,利用nlp技术减少人工提取信息成本;构件分类编码体系兼容主流标准,增加不同系统之间的互操作性,基于区块链实现编码信息的可信分布式共享;能够快速高效的智能构件检测与编码,大幅减少人工操作成本;本发明建立构件信息模型,利用人工智能、区块链和图数据库技术手段,实现构件信息的高效提取、编码、关联和利用,使信息整合和二次开发成本大幅降低,满足绿色智慧建筑对信息化要求,有助于建筑行业数字化转型。
- 还没有人留言评论。精彩留言会获得点赞!