一种红外图像收集的方法及相关装置与流程
本发明涉及电子围网系统,更具体地说,涉及一种红外图像收集的方法及相关装置。
背景技术:
1、目前的电子围网系统通常利用可见光图像实现目标检测,但处于低照度或较为恶劣天气时可见光成像所用传感器难以有效地对环境进行监控,而红外成像得益于其成像机理优势,可穿透浓雾、强降水等能见度低的气象条件,实施全天时、全天候的监控监测任务。
2、如将红外成像应用于电子围网系统的目标检测,则红外图像目标检测模型训练用的数据需求量非常大,因此对数据量依赖已经成为深度学习技术落地的严峻挑战;在图像数据领域而言,大规模的采集和标注红外图像的训练数据集相对困难或代价极高。
技术实现思路
1、本发明的目的是提供一种红外图像收集的方法及相关装置,能够以相对容易且代价低的方式实现红外图像的收集。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种红外图像收集的方法,基于智能计算平台实现,所述红外图像收集的方法包括:
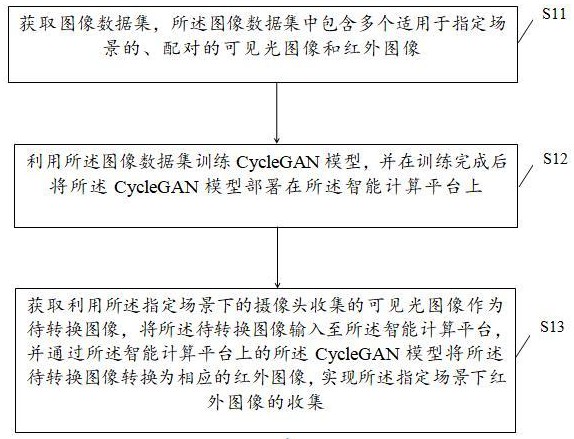
4、获取图像数据集,所述图像数据集中包含多个适用于指定场景的、配对的可见光图像和红外图像;
5、利用所述图像数据集训练cyclegan模型,并在训练完成后将所述cyclegan模型部署在所述智能计算平台上;
6、获取利用所述指定场景下的摄像头收集的可见光图像作为待转换图像,将所述待转换图像输入至所述智能计算平台,并通过所述智能计算平台上的所述cyclegan模型将所述待转换图像转换为相应的红外图像,实现所述指定场景下红外图像的收集;
7、其中,所述智能计算平台提供所述可见光图像及所述红外图像的存储功能,以及在不同计算节点分别同步训练所述cyclegan模型的功能;
8、所述cyclegan模型采用resnet50网络添加感知损失,使得所述cyclegan模型的循环一致性损失函数与resnet50网络的损失函数函数相加作为训练所述cyclegan模型时所用的损失函数;
9、所述cyclegan模型包括生成器及判别器;所述生成器采用深度残差网络,且所述深度残差网络包含的每个残差模块都连接有一个simam模块,同时所述生成器各层的激活函数为relu;所述判别器采用70x70的patchgan,同时所述判别器各层的激活函数为leakyrelu。
10、优选的,利用所述图像数据集训练cyclegan模型,包括:
11、利用所述图像数据集对所述cyclegan模型进行训练,所述cyclegan模型包含两个生成器和两个判别器,且所述生成器与所述判别器之间的关系为一一对应;
12、其中,在实现对任一生成器的训练时,固定该任一生成器所对应的判别器的参数,并训练更新该任一生成器的参数;在实现对任一判别器的训练时,固定另一判别器以及两个生成器的参数,并训练更新该任一判别器的参数。
13、优选的,利用所述图像数据集训练cyclegan模型,包括:
14、使用循环一致性损失作为模型约束,利用所述图像数据集训练cyclegan模型。
15、优选的,获取图像数据集,包括:
16、获取适用于所述指定场景的、包含配对的可见光图像和红外图像的开源数据集,作为图像数据集。
17、一种红外图像收集的装置,基于智能计算平台实现;所述红外图像收集的装置包括:
18、获取模块,用于:获取图像数据集,所述图像数据集中包含多个适用于指定场景的、配对的可见光图像和红外图像;
19、训练模块,用于:利用所述图像数据集训练cyclegan模型,并在训练完成后将所述cyclegan模型部署在所述智能计算平台上;
20、收集模块,用于:获取利用所述指定场景下的摄像头收集的可见光图像作为待转换图像,将所述待转换图像输入至所述智能计算平台,并通过所述智能计算平台上的所述cyclegan模型将所述待转换图像转换为相应的红外图像,实现所述指定场景下红外图像的收集;
21、其中,所述智能计算平台提供所述可见光图像及所述红外图像的存储功能,以及在不同计算节点分别同步训练所述cyclegan模型的功能;
22、所述cyclegan模型采用resnet50网络添加感知损失,使得所述cyclegan模型的循环一致性损失函数与resnet50网络的损失函数函数相加作为训练所述cyclegan模型时所用的损失函数;
23、所述cyclegan模型包括生成器及判别器;所述生成器采用深度残差网络,且所述深度残差网络包含的每个残差模块都连接有一个simam模块,同时所述生成器各层的激活函数为relu;所述判别器采用70x70的patchgan,同时所述判别器各层的激活函数为leakyrelu。
24、优选的,所述训练模块包括:
25、训练单元,用于:利用所述图像数据集对所述cyclegan模型进行训练,所述cyclegan模型包含两个生成器和两个判别器,且所述生成器与所述判别器之间的关系为一一对应;其中,在实现对任一生成器的训练时,固定该任一生成器所对应的判别器的参数,并训练更新该任一生成器的参数;在实现对任一判别器的训练时,固定另一判别器以及两个生成器的参数,并训练更新该任一判别器的参数。
26、优选的,所述训练单元包括:
27、训练子单元,用于:使用循环一致性损失作为模型约束,利用所述图像数据集训练cyclegan模型。
28、优选的,所述获取模块包括:
29、获取单元,用于:获取适用于所述指定场景的、包含配对的可见光图像和红外图像的开源数据集,作为图像数据集。
30、一种红外图像收集的设备,所述设备包括存储器及处理器,所述存储器上存储的程序在被所述处理器运行时可实现如上任一项所述红外图像收集的方法的步骤。
31、一种计算机可读存储介质,所述计算机可读存储介质上存储的程序被处理器执行时实现如上任一项所述红外图像收集的方法的步骤。
32、本发明提供一种红外图像收集的方法及相关装置,基于智能计算平台实现,该方法包括:获取图像数据集,所述图像数据集中包含多个适用于指定场景的、配对的可见光图像和红外图像;利用所述图像数据集训练cyclegan模型,并在训练完成后将所述cyclegan模型部署在所述智能计算平台上;获取利用所述指定场景下的摄像头收集的可见光图像作为待转换图像,将所述待转换图像输入至所述智能计算平台,并通过所述智能计算平台上的所述cyclegan模型将所述待转换图像转换为相应的红外图像,实现所述指定场景下红外图像的收集;其中,所述智能计算平台提供所述可见光图像及所述红外图像的存储功能,以及在不同计算节点分别同步训练所述cyclegan模型的功能。本发明利用适用于指定场景的配对的可见光图像和红外图像的数据集训练cyclegan模型,并在训练完成后将cyclegan模型部署到智能计算平台,从而在获取到指定场景下摄像头收集的可见光图像后,利用智能计算平台上部署的cyclegan模型将可见光图像转换为相应的红外图像,实现指定场景下红外图像的收集;本发明考虑到红外图像的收集困难或代价高,而可见光图像的收集则相对容易且代价低,因此由收集红外图像转为收集可见光图像,再利用训练并部署到智能计算平台上部署的cyclegan将收集到的可见光图像转换为对应红外图像,实现红外图像的数据收集;可见,本发明能够以相对容易且代价低的方式实现红外图像的收集。
- 还没有人留言评论。精彩留言会获得点赞!