一种用于智能水表的数据采集方法与流程
本发明一般地涉及图像处理。更具体地,本发明涉及一种用于智能水表的数据采集方法。
背景技术:
1、水表作为民用三表之一,在社会面使用量十分巨大,更新迭代十分迅速。水表的计量单位统一,数据的准确可靠对于国计民生起着十分重要的作用。从前,获取水表的读数是由抄表人员通过肉眼观看用户的水表来获取的,而当用户外出时则难以与抄表人员当面确认抄表情况,在抄表人员记录的水表读数与用户记忆中的用水情况不匹配时,则容易导致双方发生争执,不利于社会的和谐。如今,随着计算机以及图像处理技术的不断发展,出现了基于图像识别的水表数据采集方法。
2、现有的基于图像识别的水表数据采集方法主要是通过摄像头对水表读数显示屏进行拍摄,然后利用计算机图像识别对采集到的图像进行处理,对图像中的用水量读数进行识别,并将识别到的数据同步到水表数据统计系统,完成水表数据采集。但是这种方法的识别结果十分依赖图像质量。若图像质量不佳,识别结果准确率无法保证。
技术实现思路
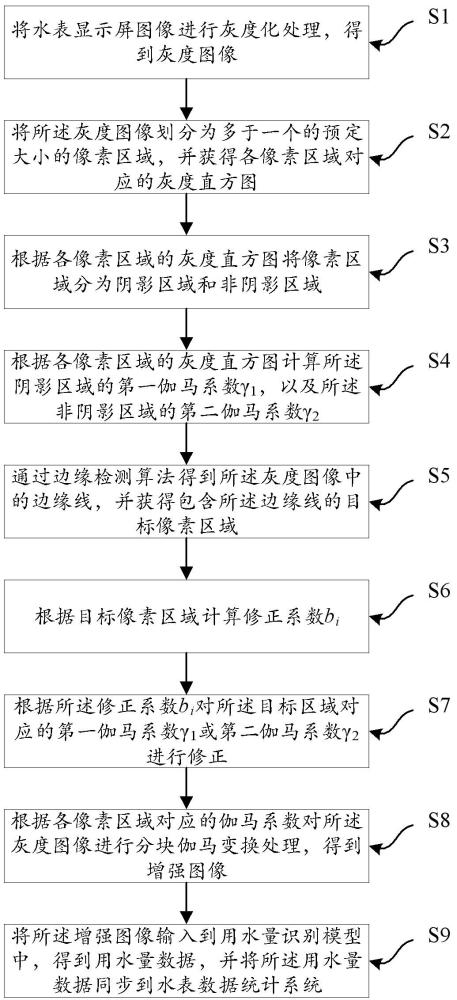
1、为解决上述可能因为水表显示屏图像图像质量不高,而使读取水表用水量的准确性降低的问题。为此,本发明提出了一种用于智能水表的数据采集方法,该方法包括:将水表显示屏图像进行灰度化处理,得到灰度图像;将所述灰度图像划分为多于一个的预定大小的像素区域,并获得各像素区域对应的灰度直方图;根据各像素区域的灰度直方图将像素区域分为阴影区域和非阴影区域;根据各像素区域的灰度直方图计算所述阴影区域的第一伽马系数 γ1,以及所述非阴影区域的第二伽马系数 γ2,其中0< γ1<1< γ2;通过边缘检测算法得到所述灰度图像中的边缘线,并获得包含所述边缘线的目标像素区域;根据目标像素区域计算修正系数 bi;根据所述修正系数 bi对所述目标像素区域对应的第一伽马系数 γ1或第二伽马系数 γ2进行修正,其中,响应于目标修正区域为阴影区域,将其对应的第一伽马系数 γ1修正为第三伽马系数 γ3: γ3= bi× γ1;响应于目标修正区域为非阴影区域,将其对应的第二伽马系数 γ2修正为第四伽马系数 γ4: γ4= bi× γ2;根据各像素区域对应的伽马系数对所述灰度图像进行分块伽马变换处理,得到增强图像,其中,所述伽马系数包括第一伽马系数 γ1、第二伽马系数 γ2、第三伽马系数 γ3以及第四伽马系数 γ4;将所述增强图像输入到用水量识别模型中,得到用水量数据,并将所述用水量数据同步到水表数据统计系统。
2、在一个实施例中,根据各像素区域的灰度直方图将像素区域分为阴影区域和非阴影区域包括:获得各像素区域的灰度直方图的目标峰值,其中,所述目标峰值包括第一目标峰值 fi1和第二目标峰值 fi2,且第一目标峰值 fi1不大于第二目标峰值 fi2;将所有像素区域对应的目标峰值通过聚类算法分为三个类别的像素区域,所述三个类别的灰度值按照均值从小到大的顺序为a类灰度值、b类灰度值以及c类灰度值;响应于像素区域对应的目标峰值均属于a类灰度值,确定该像素区域为阴影区域;响应于像素区域对应的目标峰值中的一个峰值为a类灰度值,另一个峰值为b类灰度值,确定该像素区域为阴影区域;将不被确定为阴影区域的像素区域确定为非阴影区域。
3、在一个实施例中,获得各像素区域的灰度直方图的目标峰值包括:获得各像素区域的灰度直方图的峰值的数量;响应于像素区域的灰度直方图的峰值的数量不少于两个,将该灰度直方图的峰值按从大到小的顺序排列,确定第一个峰值为所述第二目标峰值 fi2,并确定第二个峰值为所述第一目标峰值 fi1;响应于像素区域的灰度直方图的峰值的数量为一个,确定该灰度直方图的峰值为该灰度直方图的第一目标峰值 fi1以及第二目标峰值 fi2。
4、在一个实施例中,根据各像素区域的灰度直方图计算所述阴影区域的第一伽马系数 γ1,以及所述非阴影区域的第二伽马系数 γ2包括:预设超参数 β,其中, β>1;计算所述阴影区域的第一伽马系数 γ1,其中所述第一伽马系数 γ1为:
5、
6、exp为以自然函数e为底的指数函数,表示预设的初始伽马系数;计算所述阴影区域的第二伽马系数,其中所述第二伽马系数 γ2为:
7、。
8、在一个实施例中,根据目标像素区域计算修正系数 bi包括:根据所述目标像素区域的梯度方向获取与目标像素区域相邻的第一相邻区域和第二相邻区域;计算所述第一相邻区域对应的目标峰值与目标像素区域对应的目标峰值的第一最小差值,其中,所述第一最小差值满足:
9、
10、min()函数用于取得和中的最小值, fir表示第一相邻区域对应的目标峰值, fi1为所述第一目标峰值, fi2为所述第二目标峰值;计算所述第二相邻区域对应的目标峰值与目标像素区域对应的目标峰值的第二最小差值,其中,所述第二最小差值满足:
11、
12、 fil表示第二相邻区域对应的目标峰值, fi1为所述第一目标峰值, fi2为所述第二目标峰值;根据第一最小差值获得第一最佳匹配峰值 air,根据第二最小差值获得第二最佳匹配峰值 ail,其中,第一最佳匹配峰值 air满足: air>0且,第二最佳匹配峰值 ail满足: ail>0且。根据所述第一最佳匹配峰值 air和所述第二最佳匹配峰值 ail计算所述目标像素区域的修正系数 bi。
13、在一个实施例中,根据所述目标像素区域的梯度方向获取与目标像素区域相邻的第一相邻区域和第二相邻区域包括:获得所述目标像素区域的梯度方向;计算所述梯度方向与水平方向的夹角;响应于所述夹角大于45度且小于等于90度,确定所述目标像素区域的左侧的一个像素区域为所述第一相邻区域,确定所述目标像素区域的右侧的一个像素区域为所述第二相邻区域;响应于所述夹角大于0度且小于等于45度,确定所述目标像素区域的上侧的一个像素区域为所述第一相邻区域,确定所述目标像素区域的下侧的一个像素区域为所述第二相邻区域。
14、在一个实施例中,根据所述第一最佳匹配峰值 air和所述第二最佳匹配峰值 ail计算所述目标像素区域的修正系数,并通过所述修正系数对目标像素区域的伽马系数修正包括:响应于目标像素区域的对应的第一最佳匹配峰值 air不等于第二最佳匹配峰值 ail,且第一最佳匹配峰值 air和第二最佳匹配峰值 ail均小于伽马系数阈值 ω,计算目标像素区域对应的修正系数 bi:
15、;
16、响应于目标像素区域的对应的第一最佳匹配峰值 air等于第二最佳匹配峰值 ail,或第一最佳匹配峰值 air和第二最佳匹配峰值 ail均不小于伽马系数阈值 ω,得到目标像素区域对应的修正系数 bi: bi=1。
17、在一个实施例中,根据各像素区域对应的伽马系数对所述灰度图像进行分块伽马变换处理,得到的第 i个像素区域中第 j个像素点的灰度值满足:
18、
19、其中,表示所述灰度图像中的第 i个像素区域中第 j个像素点的灰度值, γi表示所述灰度图像中的第 i个像素区域对应的所述伽马系数。
20、在一个实施例中,还包括对分块伽马变换后生成的图像进行差值运算。
21、在一个实施例中,一种用于智能水表的数据采集方法还包括构建所述用水量识别模型:构建神经网络模型;获得数据集,所述数据集包括预定数量的所述增强图像,其中,各增强图像对应一个水表显示屏图像;对数据集中的各增强图像进行标注;所述神经网络模型通过标注后的数据集进行训练,得到所述用水量识别模型。
22、本发明的有益效果为:
23、本发明将水表的灰度图像划分为大小相同的像素区域,并根据像素区域的灰度直方图将各像素区域归类为阴影区域或非阴影区域,以便于根据像素区域的所属的类别(阴影区域或非阴影区域)以不同的方式对各像素区域的伽马系数进行修正。修正的依据为各像素区域对应的灰度直方图的峰值,因此各像素区域的伽马系数通常不同,且可以使图像的对比度更高。其中,修正得到的阴影区域的伽马系数小于1、非阴影区域的伽马系数大于1,使得对灰度图像进行伽马变换时,阴影区域和非阴影区域的对比度都得到增强。
24、但是,考虑到阴影的边缘(明暗交界处)因为阴影区域和非阴影区域的对比度都得到增强,从而使边缘线更加明显,不仅导致一些视觉上的不连续性,还会降低识别水表数据的准确度。因此本发明根据灰度图像的边缘线所经过的像素区域的相邻像素区域判断经过该像素区域是否为阴影的边缘线,进而调整阴影的边缘线所经过的像素区域的对比度,即对阴影的边界模糊处理(减小对比度),具体为:减小阴影的边界经过的伽马系数,使得阴影区域最终灰度值增大,与非阴影区域灰度值减小,进而减小阴影区域与非阴影区域灰度值的差别
25、综上所述,本发明通过对阴影的特征进行分析,改进伽马变换算法,对图像进行增强,增强图像的对比度,减弱阴影造成的影响,从而在后续的识别过程中增加读数识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!