一种数据处理方法、装置、设备以及存储介质与流程
本技术涉及计算机领域,尤其涉及一种数据处理方法、装置、设备以及存储介质。
背景技术:
1、高精地图也称为高分辨率地图(high definition map,hd map)或高精度自动驾驶地图(high automated driving map,had map),主要面向自动驾驶汽车应用。相较于普通导航地图,高精地图的精度更高,可达厘米级,具有更精细化的道路元素,如车道线、交通标志牌等。
2、而制作高精地图的流程如下:采用专用高精地图采集车,对某个区域进行数据采集,然后基于高精地图的图幅数据进行分区处理,然后基于采集到的数据进行分区制作。这样对于地图数据处理的并行度有较大的限制,不能满足通用道路场景的需要。
3、因此,目前亟需一种可以提高地图数据处理的并行度以及泛用性的地图数据处理方法。
技术实现思路
1、本技术实施例提供了一种数据处理方法、装置、设备以及存储介质,用于提高地图数据处理的并行度以及泛用性。
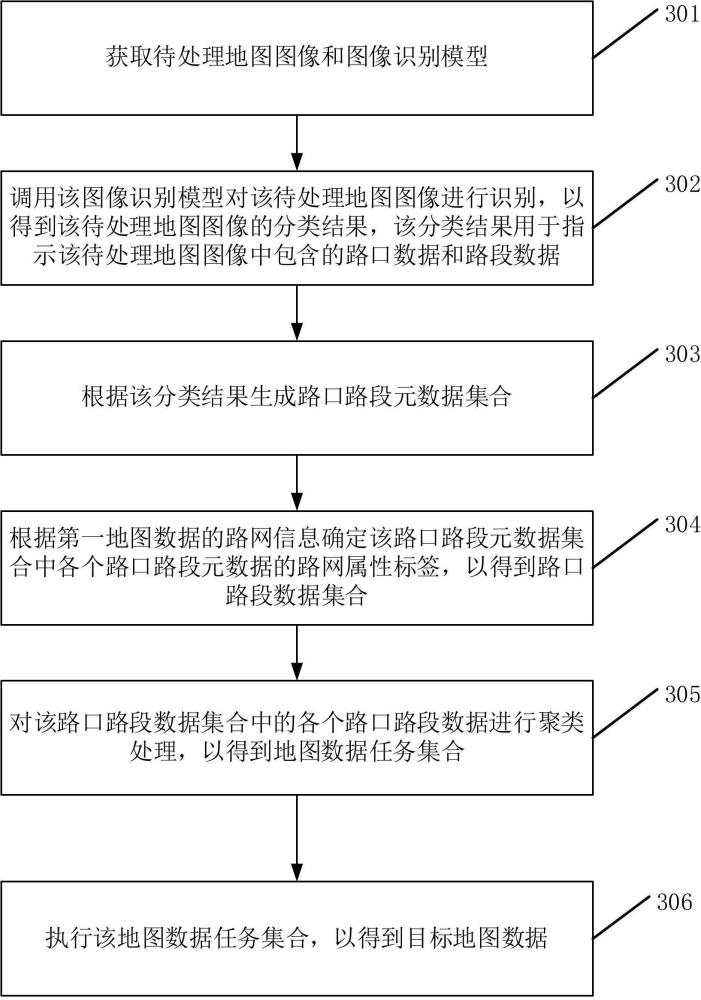
2、有鉴于此,本技术一方面提供一种数据处理方法,包括:获取待处理地图图像和图像识别模型;调用该图像识别模型对该待处理地图图像进行识别,以得到该待处理地图图像的分类结果,该分类结果用于指示该待处理地图图像中包含的路口数据和路段数据;根据该分类结果生成路口路段元数据集合;根据第一地图数据的路网信息确定该路口路段元数据集合中各个路口路段元数据的路网属性标签,以得到路口路段数据集合;对该路口路段数据集合中的各个路口路段数据进行聚类处理,以得到地图数据任务集合;执行该地图数据任务集合,以得到目标地图数据。
3、本技术另一方面提供一种数据处理装置,包括:
4、获取模块,用于获取待处理地图图像和图像识别模型;
5、处理模块 ,用于调用该图像识别模型对该待处理地图图像进行识别,以得到该待处理地图图像的分类结果,该分类结果用于指示该待处理地图图像中包含的路口数据和路段数据;根据该分类结果生成路口路段元数据集合;根据第一地图数据的路网信息确定该路口路段元数据集合中各个路口路段元数据的路网属性标签,以得到路口路段数据集合;对该路口路段数据集合中的各个路口路段数据进行聚类处理,以得到地图数据任务集合;
6、执行模块,用于执行该地图数据任务集合,以得到目标地图数据。
7、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于计算该路口路段数据集合中各个路口路段数据的第一偏向角集合;
8、基于该第一偏向角集合对该各个路口路段数据进行路段方向划分,以得到横向路段集合和纵向路段集合;
9、基于该横向路段集合构建横向图,并基于该纵向路段集合构建纵向图,其中,该横向路段集合中的各路段为该横向图的节点,该横向路段集合中的各路段的相交关系为该横向图的边,该纵向路段集合中的各路段为该纵向图的节点,该纵向路段集合中的各路段的相交关系为该纵向图的边;
10、遍历该横向图和该纵向图得到第一连通子图集合,该第一连通子图集合作为该地图数据任务集合,其中,该第一连通子图集合中的每一个连通子图作为一个地图数据任务。
11、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于遍历该横向图和该纵向图得到第二连通子图集合;
12、遍历该第二连通子图集合中各个连通子图的作业里程总数,该作业里程总数为该各个连通子图包含的路口路段数据的作业里程之和,该作业里程用于指示路段的长度;
13、在存在作业里程总数小于第一阈值的目标连通子图时,按照第一合并规则对该目标连通子图进行合并处理,以得到该第一连通子图集合。
14、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于获取该目标连通子图的相交异向路段;
15、若存在该目标连通子图的相交异向路段,则将该目标连通子图与该相交异向路段进行合并处理,以得到第一连通子图;
16、若该第一连通子图的作业里程总数大于或者等于该第一阈值,则将该第一连通子图归于该第一连通子图集合。
17、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于若不存在该目标连通子图的相交异向路段,则将该目标连通子图与第一同向路段进行合并处理,以得到第二连通子图,其中,该第一同向路段与该目标连通子图之间的距离值最小且属于同方向;
18、在该第二连通子图的作业里程总数大于或者等于该第一阈值时,将该第二连通子图归于该第一连通子图集合。
19、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于获取该路口路段数据集合中各个路口路段数据的最小外接矩形;
20、计算该最小外接矩形的长边相对于基准方向的偏向角;
21、对该偏向角进行取整处理,以得到第二偏向角集合;
22、对该第二偏向角集合中的各个偏向角按照第一取值范围进行取整采样,以得到中间偏向角;
23、根据该中间偏向角与该第二偏向角集合生成该第一偏向角集合。
24、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于遍历该第一偏向角集合,以得到各个偏向角的统计数量;
25、选择最大统计数量对应的第一偏向角指示的方向为横向,第二偏向角指示的方向为纵向,其中该第二偏向角与该第一偏向角之间相差90度;
26、计算该各个路口路段数据对应的偏向角与该第一偏向角的第一差异值,以及该各个路口路段数据对应的偏向角与该第二偏向角的第二差异值;
27、将该第一差异值与该第二差异值进行比较,选择较小差异值对应的偏向角确定该各个路口路段数据的方向,以得到该横向路段集合和该纵向路段集合。
28、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于遍历该路口路段数据集合中的路段以及该路段的原始任务规模,基于该路段构建第一路段关系图,其中,该路段为该第一路段关系图的节点,该路段之间的相交关系为该第一路段关系图的边,该任务规模用于指示各个路段中的待修复任务数量;
29、按照期望任务规模、该原始任务规模以及第二合并规则对该第一路段关系图中的各个路段进行合并处理,以得到该地图数据任务集合,该期望任务规模用于指示包括最大任务规模、最小任务规模以及目标任务规模,其中,该最大任务规模用于指示一个地图数据任务中执行的最大待修复任务数量,该最小任务规模用于指示一个地图数据任务中执行的最小待修复任务数量,该目标任务规模用于指示一个地图数据任务中执行的合理待修复任务数量。
30、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于遍历该第一路段关系图中的各个路段,以得到第一离散路段集合、第一路段集合和第二路段集合,其中,该第一离散路段集合中各个路段之间不相交,该第一路段集合中各个路段与一个路段相交,该第二路段集合中的各个路段与至少两个路段相交;
31、根据该期望任务规模、该原始任务规模对该第一离散路段集合中的各个离散路段进行合并处理,以得到第一任务集合,其中,该第一任务集合中的各个任务的任务规模小于该最大任务规模且大于该目标任务规模或者该第一任务集合中存在任务规模大于或者等于该最大任务规模的第一目标任务时,该第一目标任务中包括任务规模小于该最小任务规模的离散路段;
32、根据该期望任务规模、该原始任务规模对该第一路段集合中的各个路段进行合并处理,以得到第二任务集合,其中,该第二任务集合中的各个任务的任务规模小于该最大任务规模且大于该目标任务规模或者该第二任务集合中存在任务规模大于或者等于该最大任务规模的第二目标任务时,该第二目标任务中包括任务规模小于最小任务规模的路段;
33、根据该期望任务规模、该原始任务规模对该第二路段集合中的各个路段进行合并处理,以得到第三任务集合,其中,该第三任务集合中的各个任务的任务规模小于该最大任务规模且大于该目标任务规模或者该第 任务集合中存在任务规模大于或者等于该最大任务规模的第三目标任务时,该第三目标任务中包括任务规模小于最小任务规模的路段;
34、将该第一任务集合、该第二任务集合和该第三任务集合合并,以得到中间任务集合;
35、基于该中间任务集合中的各个任务构建第二路段关系图,其中,该中间任务集合中的各个任务为该第二路段关系图中的节点,该中间任务集合中的各个任务中的相交关系为该第二路段关系图中的边;
36、在该第二路段关系图与该第一路段关系图不相同时,依此重复执行上述操作,直到路段关系图不再变化,以得到该地图数据任务集合。
37、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于根据该原始任务规模从该第一离散路段集合中确定第二离散路段集合,其中,该第二离散路段集合中的各个离散路段的原始任务规模小于该目标任务规模;
38、获取该第二离散路段集合中第一离散路段的第一目标离散路段集合,其中该第一目标离散路段集合中的各个离散路段与该第一离散路段的距离满足第一距离阈值;
39、按照距离从小到大将该第一目标离散路段集合中的各个离散路段与该第一离散路段进行合并处理,以得到第一合并路段;
40、依此遍历该第二离散路段集合,以得到多个第一合并路段,该多个第一合并路段作为该第一任务集合。
41、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于获取第二路段集合中的第一路段的相交路段集合;
42、将该相交路段集合中的各个相交路段按照该原始任务规模从小到大进行排序;
43、依次将该相交路段集合中的各个相交路段与该第一路段进行合并处理,以得到第二合并路段;
44、依此遍历该第二路段集合,以得到多个第二合并路段,该多个第二合并路段作为该第三任务集合。
45、在一种可能的设计中,在本技术实施例的另一方面的另一种实现方式中,该处理模块,用于获取训练样本和初始图像识别模型,其中,该训练样本是对采集到的地图图像和卫星图像进行标注得到;
46、基于该训练样本对该初始图像识别模型进行训练,以得到该图像识别模型。
47、本技术另一方面提供一种计算机设备,包括:存储器、处理器以及总线系统;
48、其中,存储器用于存储程序;
49、处理器用于执行存储器中的程序,处理器用于根据程序代码中的指令执行上述各方面的方法;
50、总线系统用于连接存储器以及处理器,以使存储器以及处理器进行通信。
51、本技术的另一方面提供了一种计算机可读存储介质,计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述各方面的方法。
52、本技术的另一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述各方面所提供的方法。
53、从以上技术方案可以看出,本技术实施例具有以下优点:利用图像识别模型对待处理地图图像进行识别,从而将待处理地图图像按照路口路段进行划分得到路口路段元数据;然后基于已有的路网信息对该路口路段元数据确定路网属性标签得到可用的路口路段数据,从而得到地图数据制作时的基础信息;最后将路口路段数据作为地图数据任务的分组依据,由于路口路段数据具有低区间冲突的优势,从而可以提高地图数据处理的并行度。同时路口路段数据是地图数据的基础信息,使得地图数据制作时可以不依赖于具体的地图数据规格,对于多种场景的地图数据均适用,从而提高地图数据的泛用性。
- 还没有人留言评论。精彩留言会获得点赞!