一种基于蓝绿灰比例构建空间场景的方法
本技术涉及数据处理,特别涉及一种基于蓝绿灰比例构建空间场景的方法。
背景技术:
1、传统土地覆被/利用分类无法反映土地利用功能因区位不同带来的差异性,而空间场景是一种比传统土地覆盖/利用更高层级的认知和综合,可以弥补传统土地分类的缺点,具备自然、社会、经济和生态等多维属性,是不同地理单元功能属性差异性在空间上的一种分布状况。空间场景也不同于功能区划,其粒度更细,且不以规划目标为导向,是基于客观世界的社会功能提供的量化反应。以空间场景作为基本计算单元,研究其空间拓扑关系及其带来的社会功能提供的变化,在此基础上开展生态承载力与空间优化的研究,以拓展生态安全调控研究的思路,为区域生态安全综合评估与调控提供一种新的方法体系,这对于地学综合交叉及陆海统筹等研究都具有重要科学意义。
2、一些现有技术也涉及到空间场景的研究,并提供了空间场景分类体系,比如文献1:“地理学视角下土地利用/覆被分类发展探讨,王志华等,地理研究,2022”构建了城市功能区的空间场景分类体系,将城市地区分为道路、工业区、公共服务区、水体、居民区、商业区、植被和裸地。文献2:“近30年粤港澳大湾区海岸带与海域生态承载力及可持续性变化--基于空间场景的新一代评估框架,唐玉芝等,地理学报,2023”构建了海岸带和近海的空间场景分类体系,将海岸带分为两大类:沿海陆地、潮间带与海水区域。前者为陆地生态系统,后者为海岸带和海洋生态系统。沿海陆地首先按照土地覆被和生态功能划分为林地、草地、耕地和人工场景等类型;然后,再依据主导社会经济属性和生态外部性进一步细分到空间场景,如林地划分为森林(不以经济活动为目的,几乎不产生污染)和种植园(以经济活动为目的,会产生污染);人工场景划分为聚居地、交通物流和能源场景等,其中聚居地再根据经济活动类型细分为居住、公共服务、商业贸易和工业生产等场景。
3、虽然上述分类体系在一定程度解决了同一土地利用/覆被类型因位置不同带来的经济和生态差异问题,但是未能顾及同一空间场景的内部异质性。
4、因此,需要提供一种针对上述现有技术不足的改进技术方案。
技术实现思路
1、本技术的目的在于提供一种基于蓝绿灰比例构建空间场景的方法,以解决或缓解上述现有技术中存在的问题。
2、为了实现上述目的,本技术提供如下技术方案:
3、本技术提供了一种基于蓝绿灰比例构建空间场景的方法,包括:
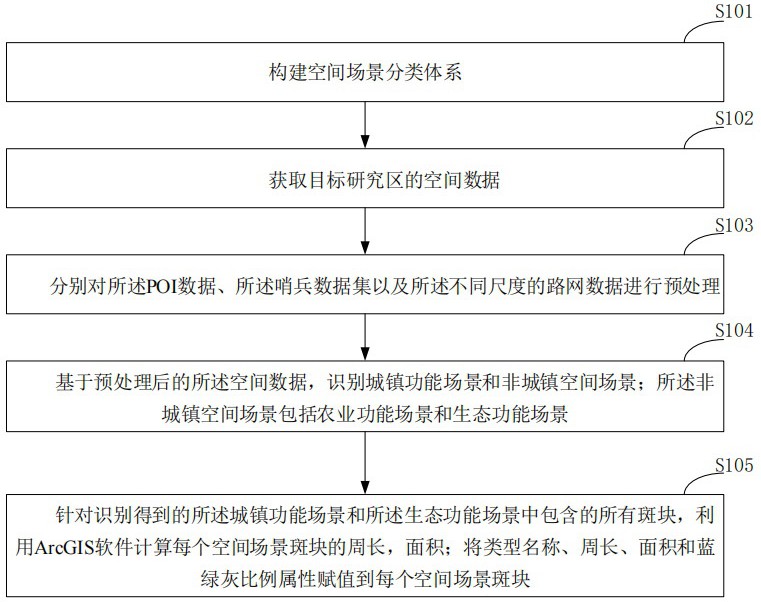
4、构建空间场景分类体系;
5、其中,所述空间场景分类体系包括一级空间场景,所述一级空间场景分为农业功能场景、城镇功能场景和生态功能场景,各个功能场景的覆盖范围又分为多个二级空间场景,各个所述二级空间场景由矢量斑块组成,每一空间场景斑块被设置为包含以下属性:类型名称,周长,面积以及蓝绿灰比例;蓝绿灰比例属性用于表征同一空间场景的内部异质性;
6、获取目标研究区的空间数据,所述空间数据至少包括poi数据、哨兵数据集以及不同尺度的路网数据;
7、分别对所述poi数据、所述哨兵数据集以及所述不同尺度的路网数据进行预处理;
8、基于预处理后的所述空间数据,识别城镇功能场景和非城镇空间场景;所述非城镇空间场景包括农业功能场景和生态功能场景;
9、针对识别得到的所述城镇功能场景和所述生态功能场景中包含的所有斑块,利用arcgis软件计算每个空间场景斑块的周长,面积;将类型名称、周长、面积和蓝绿灰比例属性赋值到每个空间场景斑块。
10、一些可选方案中,识别所述非城镇空间场景,包括如下步骤:
11、基于云计算平台google earth engine,结合哨兵影像,利用随机森林的监督分类方法提取各个非城镇空间场景的分布;
12、随机森林的监督分类样本点按照如下步骤提取:
13、对哨兵影像中的水体、耕地、养殖用地、其他植被以及不透水面进行提取,并通过目视判读建立解译标志,判别耕地、水体、养殖用地、其他植被、未利用地以及不透水面的空间场景类型,建立样本库;
14、提取训练样点时,各类别样本总数量为1:1比例,其中,70%的样本点用于训练,30%的样本点用于验证精度。
15、一些可选方案中,在识别所述非城镇空间场景之后,所述方法还包括:
16、借助已有土地利用资料对所述非城镇空间场景进行精细再分类,进而识别出经济林和草地相应的空间场景。
17、一些可选方案中,对所述城镇功能场景进行识别,包括如下步骤:
18、通过所述不同尺度的路网数据对目标研究区进行分割,得到分割图斑;
19、建立训练样本点,对所述分割图斑进行标识,以将所述分割图斑划归所述城镇功能场景中的工业场景或者非工业场景;
20、对所述非工业场景内的poi点进行区位型场景与密度型场景识别,以获取所述非工业场景的主导空间场景,并将所述主导空间场景作为该非工业场景对应的识别结果。
21、一些可选方案中,所述建立训练样本点,包括如下步骤:
22、基于所述哨兵数据集,对工业场景和非工业场景进行影像光谱分析和纹理信息提取,以确定优选波段;
23、根据优选波段,建立训练样本点。
24、一些可选方案中,所述影像光谱分析包括:
25、分析工业空间场景在各波段上的光谱均值、标准差、亮度,结合归一化植被指数、归一化水体指数和归一化不透水面指数,识别工业场景和非工业场景的差异特征。
26、一些可选方案中,对所述poi数据进行预处理包括如下步骤:
27、对所述poi数据中的重名、重坐标数据进行查重与清洗,得到清洗后的poi数据;
28、对所述清洗后的poi数据进行重分类处理,获得重分类的poi数据;
29、将所述重分类的poi数据与二级空间场景建立对应关系;
30、对所述非工业场景内的poi点进行区位型场景与密度型场景识别,以获取所述非工业场景的主导空间场景,具体为:
31、根据所述重分类的poi数据与二级空间场景的对应关系,对所述非工业场景内的poi点进行区位型场景与密度型场景识别,以获取所述非工业场景的主导空间场景。
32、一些可选的实施方案中,对所述非工业场景内的poi点进行区位型场景识别,包括:
33、从公众认知度、空间占地面积角度,将所述非工业场景内的poi点分为区位型poi和密度型poi;
34、对区位型poi,构建其对应的场景单元的频数密度向量,并计算出poi在场景单元中的数量比重,若数量比重大于预设的比重阈值,则确定该场景单元的主导空间场景;
35、对密度型poi,依据预先获取的poi地理实体面积与权重表,利用核密度和相似度模型对城镇功能场景进行识别。
36、一些可选方案中,对所述哨兵数据集进行预处理包括如下步骤:
37、基于云覆盖率对所述哨兵数据集进行筛选,得到筛选后的遥感影像;
38、利用质量控制对所述筛选后的遥感影像进行低质量区掩膜处理,并按年份对掩膜处理得到的遥感影像进行均值处理,得到均值影像。
39、一些可选方案中,对所述不同尺度的路网数据进行预处理包括如下步骤:
40、按道路等级从所述不同尺度的路网数据提取不同类型的道路,以建立密集道路网;所述不同类型的道路包括以下一种或多种:高速公路、一级道路、二级道路、三级道路;
41、针对所述不同类型的道路,设置不同的缓冲宽度;
42、以所述密集道路网中的道路为中心,基于所述缓冲宽度构建路网缓冲带;
43、对应地,
44、所述通过所述不同尺度的路网数据对城镇范围内的区域进行分割,得到分割图斑,具体为:
45、使用所述路网缓冲带对目标研究区进行分割,得到分割图斑。
46、本技术实施例的技术方案具有如下有益效果:
47、本技术的技术方案中,通过构建空间场景分类体系,将空间场景分为一级空间场景和二级空间场景两个级别,其中,一级空间场景包括农业、城镇、生态、工业空间场景,各个一级空间场景又分别包括多个二级空间场景,二级空间场景由矢量斑块组成,矢量斑块的属性被设置为:类型名称,周长,面积以及蓝绿灰比例,其中,蓝绿灰比例用于表征同一空间场景的内部异质性,蓝色代表水体,绿色代表植被,而灰色代表不透水面,由于蓝-绿-灰比例可以区分城市和生态休闲等场景中同一功能类型在区域内的生态功能服务差异和经济产出差异,使用蓝绿灰比例来描述同质功能区/同一空间场景的内部异质性,能够更好地说明土地利用因位置不同而带来的差异。在设置分类体系并确定矢量斑块属性的基础上,本实施例提供的构建空间场景的方法还包括如下步骤:获取空间数据、对空间数据进行预处理以及分别对城镇功能场景和非城镇空间场景进行识别,在准确识别各个空间场景的基础上,计算每个空间场景斑块的周长、面积,并将类型名称、周长、面积和蓝绿灰比例属性赋值到每个空间场景斑块,上述步骤构成一套完整的空间场景构建流程,从而解决传统土地利用/覆被难以顾及同质功能区的内部异质性难题。
- 还没有人留言评论。精彩留言会获得点赞!